DSP在污水处理溶解氧控制方面的应用
2010-03-13 08:54李军生欧卫斌李为民
电子设计工程 2010年8期
李军生,欧卫斌,李为民
(宝鸡文理学院 电气系,陕西 宝鸡 721007)
当前随着水资源的不断减少,水质污染日益严重,人类生存受到严重威胁。污水处理与再循环利用已成为解决该危机的有效手段之一。 目前,国内外城市污水处理厂处理工艺大都采用一级处理和二级处理。一级处理是采用物理方法,主要通过格栅拦截、沉淀等手段去除废水中大块悬浮物和砂粒等物质。二级处理则是采用生化方法,主要通过微生物的生命运动等手段来去除废水中的悬浮性,溶解性有机物以及氮、磷等营养盐。连续循环曝气系统(Continuous Cycle Aeration System,CCAS)工艺,它是现阶段在污水处理工艺中一种较先进的处理工艺,是一种连续进水式SBR曝气系统,其生物处理核心是CCAS反应池,除磷、脱氮、降解有机物及悬浮物等功能均在该池内完成;它要求反应池分别工作于好氧、缺氧、厌氧3种不同的时段,使污水在“好氧-缺氧”的反复中完成去碳、脱氮,并在“好氧-厌氧”的反复中完成除磷。由于其曝气设备一般为罗茨风机和鼓风机,这样也就使风机根据好氧、缺氧、厌氧3种不同时段溶解氧DO浓度的需要,起起停停,造成风机频繁的起动停车,致使设备运行费用高;同时,由于CCAS反应池存在纯滞后特征,易使系统控制产生振荡,致使反应池内溶解氧DO浓度忽高忽低,严重影响了出水的质量。
采用TMS320LF2812型DSP作为主控芯片,充分利用它所具有的实时运算能力,丰富电机控制外围电路和接口资源,对罗茨风机电机实行转子磁场定向矢量的变频控制,使电机能根据溶解氧DO的需要工作于不同的转速,确保溶解氧DO的浓度恒定;同时,在系统中引入Smith预估控制,从而保证出水水质的要求。
1 污水处理中溶解氧DO的控制原理
污水处理中溶解氧DO的大小是由鼓风机的鼓风量的大小决定的,而鼓风量的大小与风机叶片旋转的快慢有关,这样就可以根据反应池中的溶解氧DO的需要控制风机的转速,通过建立溶解氧DO环、速度环和电流环组成三闭环的系统模式,实现对溶解氧DO的恒定控制。
速度环和电流环作为内环主要用于对风机电机的转速和电流进行控制,以适应溶解氧DO环的需要,风机电机一般采用三相交流异步电动机,在此采用转子磁链定向的矢量变频控制[1],其控制原理如图1所示。

图1三相交流异步电动机FOC控制结构框图Fig.1 Structure of 3-phase AC asynchronous motor FOC control
只要保持is与d轴垂直,电机的转矩方程为:

式中,pm为转子磁极对数,Ψr为转子磁场在定子上的耦合磁链,isd、isq为定子电流矢量 is在d、q 轴的分量;通过控制isq来控制转矩,实现对电机转速的变频控制。
溶解氧DO环作为外环主要完成对CCAS反应池内的溶解氧DO的大小进行无静差控制,由于CCAS反应池属于大滞后惯性环节,为提高系统的动态性能,为此引入改进的Smith预估控制环节,其原理图如图2所示[2]。
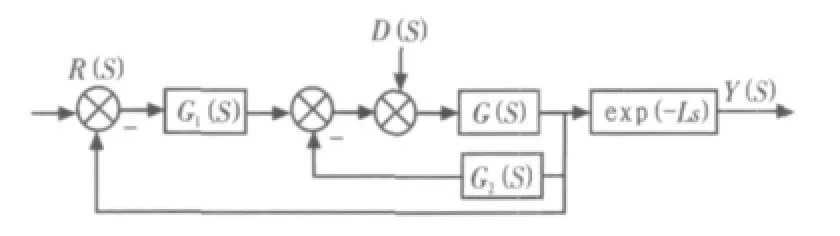
图2改进的Smith预估控制器简化框图Fig.2 Simplified diagram of improved Smith predictor control
图中G1(S)为主控制器PI的传递函数, G2(S)为辅助控制器PD的传递函数,G(S)为控制对象不含滞后环节的传递函数,从图中可以看出:它是在经典的Smith预估器的基础上,经等效变换后获得的,改进后的Smith预估控制器可以等效为:先通过Smith预估器将原有的控制对象经PD控制器的反馈修正后,再用PI控制器对等效对象进行控制。由于等效对象中增加了一个开环零点,使得系统的截止频率增大,从而可在由PI控制器进行控制时,得到较快的响应;同时,PD控制器可使等效对象的闭环极点分布在合适的位置,从而得到更好的控制性能。根据转速环的等效传递函数[3]和CCAS反应池的惯性特征,令G(S)=K/(T1S+1)(T2S+1),T1≥T2, G1(S)=Ki(TiS+1)/TiS,G2(S)=Kd(TdS+1),则Smith预估控制器所需的参数为:
Ti=Td=T1,Ki=T1T2ωn2/K,Kd=(1.41T2ωn-1)/K,ωn=5.66/TS。
经过以上的考虑及设计,就组成了带Smith预估控制器的三环系统结构,系统工作时,首先,通过氧浓度传感器将DO转化为电信号,然后经过运放及运放调节电路转换成0~5 V的电压信号与DO给定相比较,经PI运算输出速度给定信号nref,然后与检测到转子速度的微分信号相比较,经PI运算输出控制转矩的电流分量isqref,电流分量给定信号与经过坐标变换的电机实际电流分量比较,通过电流调节器的PI运算,其输出量经Park逆变换,得到Vsαref、Vsβref,空间SVPWM模块根据这2个信号计算PWM的占空比,生成PWM波,驱动逆变器,产生可变频率和幅值的三相正弦电流输入电机定子,驱动电机以一定的转速运行,对污水进行鼓风加氧,调节溶解氧DO的大小,从而达到控制反应池内溶解氧DO大小的目的,控制出水水质。
2 系统的硬件电路与功能[4]
该系统主要由主电路、DSP控制电路、检测反馈与保护电路来组成,其系统组成的原理框图[5]如图3所示。主电路由整流器、IPM逆变器、电机组成,IPM采用三菱公司智能功率模块PM20CSJ060,其内部有高速低损耗IGBT共6只,组成三相全桥逆变电路,并且内部集成有驱动电路,过电压、过电流、过热及欠电压等故障保护电路,当故障时IPM发出信号,通过TMS320F2812的外部中断PDPINT封锁DSP输出PWM脉冲,从而保护IPM免受损坏[6]。为避免电机制动时产生过高的泵生电压,设有能耗制动时的能量泄放控制。
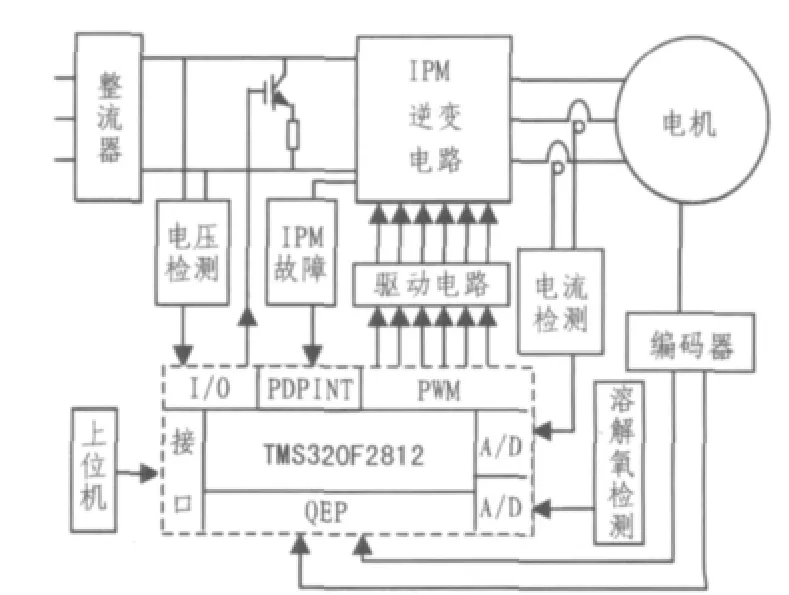
图3系统的硬件电路框图Fig.3 Schematic diagram of system hardwale
控制电路主要由上位机、TMS320F2812、输入/输出接口电路等组成,TMS320F2812采用高性能的静态CMOS技术,主频达150 MHz(时钟周期6.67 ns),提高了系统实时控制的能力, 片内128 K×16位的Flash,128 K×16位ROM,18 K×16位的SARAM,1 K×16位一次可编成的存储器OTP。12位A/D转换器达16个,PWM输出通道达12个,使控制系统的价格大大降低而且体积缩小,可靠性提高。
电机相电流检测是通过电流型霍尔传感器和电阻采样后转换为电压信号,再经AC-DC变换为0~3 V的电压信号接入DSP的A/D通道1引脚。系统采用的光电编码器为每周2 500脉冲,有20针的标准接口,提供6路脉冲信号。脉冲经QEP电路4倍频,用来计算转子位置和转速。CCAS反应池内溶解氧DO的检测由插入污水中的COS4型溶解氧传感器完成,经COM252型溶氧变送器将其转换为0~5 V的电压信号接入DSP的A/D通道2引脚,用来反映实际的溶解氧DO大小。
3 系统软件设计
系统软件部分的设计主要由主程序、运行控制子程序等组成,如图4和图5所示。主程序完成硬件、软件初始化、故障检测及处理、通信、运行等,硬件初始化主要完成DSP的设置,如看门狗、时钟、计时器、ADC、SCI、I/O、事件管理( EV)等的设置,软件初始化主要对软件变量赋予初值,DSP通过SCI串口与上位机(微机)保持通信,接收上位机传送的命令,更新变量和标志,实现实时追踪控制。运行控制子程序主要是通过电动机的FOC矢量变频控制,实现对CCAS反应池内溶解氧DO大小进行监测和闭环控制。

图4主程序流程图Fig.4 Flow chart of main program

图5运行子程序流程图Fig.5 Flow chart of subroutine
4 实验仿真
应用Matlab建立控制系统仿真模型,仿真参数设置如下:电 动 机 参 数 为 :Rs=0.087 1 Ω,Rr=0.228 Ω,Ls=0.035 H,Lr=0.035 H,Lm=0.034 7 H, Np=2,J=0.1 kg·m2,负载转矩为30 N·m。
L=0.7 s,Ti=Td=T1=0.5 s,T2=0.28 s,K=2, 外环采样TS=2 s,计算Ki=0.561,Kd=0.059。
一般情况下厌氧池的DO小于0.1 mg/L,缺氧池的DO小于0.5 mg/L,耗氧池的DO控制在2~3 mg/L之间,通过对CCAS反应池内溶解氧DO的给定设置(2、0.5、0.1 mg/L)并进行仿真,仿真结果如图6所示。从仿真曲线可以看出,随系统设置给定的变化,在不同阶段系统控制输出信号上升较快,调节时间较短,参数稳定,克服了时滞大惯性缓解对系统性能的影响,实时控制及时,稳定效果较好。
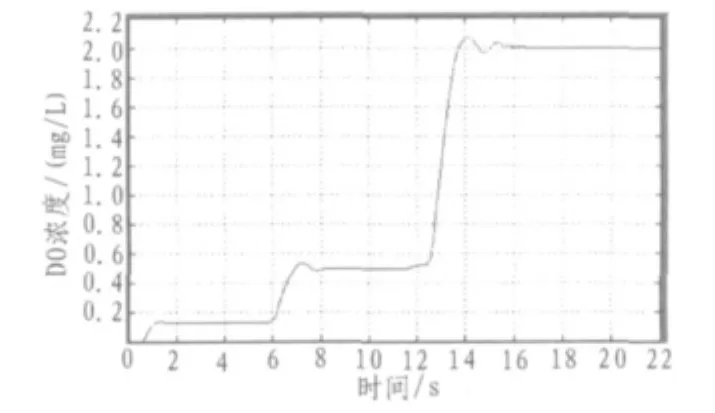
图6仿真波形Fig.6 Simulation waveform
5 结 论
该系统通过采用TMS320LF2812控制芯片组成控制系统,完成对风机的矢量变频调速控制,节能、控制效果好,使系统具有良好的动态响应性能和静态性能;通过引入的Smith预估补偿控制[7-8],提高了系统的响应速度和系统的鲁棒性,并使系统具有硬件简单和性价比高等优点。
[1]李永东.交流电机数字控制系统[M].北京:机械工业出版社,2002.
[2]贺晓蓉,刘述喜,陈新岗.基于SVPWM的异步电机矢量控制系统的仿真[J].计算机仿真,2007,24(4):322-325.HE Xiao-rong,LIU Shu-xi,CHENXin-gang.Simulation of vector control system of induction machine based on SVPWM[J].Computer Simulation,2007,24(4):322-325.
[3]山圣峰.由DSP生成空间矢量脉宽调制波[J].微电机,2002(5):51-55.SHAN Sheng-feng.Generation of voltage vector PWM wave by DSP[J].Micromotors.servo Technique,2002(5):51-55.
[4]陈大科.基于MATLAB的定点DSP小波变换程序设计方法[J].数据采集与处理,2006(21):86-89.CHEN Da-ke.Methods for fixed-point DSP wavelet transform based on MATLAB [J].Journal of Data Acquisition&Processing,2006(21):86-89.
[5]郑红,隋强强,周星.DSP应用系统设计实例[M].北京:北京航空航天大学出版社,2008.
[6]韩安太,刘峙飞,黄海.DSP控制器原理及其在运动控制系统中的应用[M].北京:清华大学出版社,2003.
[7]宋任杰.一种改进的Smith预估控制器[J].控制工程,2007,14(5):89-90.SONG Ren-jie.Design of a modified Smith predictive controller[J].Control Engineering of China,2007,14(5):89-90.
[8]陈伯时.电力拖动自动控制系统 [M].3版.北京:机械工业出版社,2007.
猜你喜欢
矿山安全信息(2022年22期)2022-11-24
中学生数理化·高一版(2021年11期)2021-09-05
科技视界(2021年21期)2021-08-24
海洋通报(2021年2期)2021-07-22
科学与信息化(2020年11期)2020-06-19
计算机测量与控制(2017年6期)2017-07-01
现代防御技术(2016年1期)2016-06-01
当代化工研究(2016年2期)2016-03-20
新高考·高一物理(2016年1期)2016-03-05
出版与印刷(2013年3期)2013-01-31