
使用电力系统分析程序对励磁参数的整定
2010-03-02 03:21翟晓佳
山西电力 2010年5期
王 琳,翟晓佳
(1.中电投华北电力工程有限公司,山西 太原 030001;2.山西太原供电局,山西太原 030001)
使用电力系统分析程序对励磁参数的整定
王 琳1,翟晓佳2
(1.中电投华北电力工程有限公司,山西 太原 030001;2.山西太原供电局,山西太原 030001)
发电机励磁系统参数整定的结果直接影响发电机、电网的安全稳定运行,同时,参数整定是进行励磁系统参数测试、建模的重要环节,针对励磁系统参数调整和建模提出了参数预整定和采用电力系统分析程序进行参数整定的方法,解决了现场参数调整时间长的问题,将励磁系统参数建模和测试有机地结合起来。
励磁系统;参数;测试;建模
0 引言
随着全国联网和系统扩能的要求,目前全国电力系统正在进行发电机励磁系统参数测试和电力系统稳定器PSS(Power System Stabilizer)试验,采用励磁系统实测参数要求参数的准确性,同时要求对实测参数进行优化;励磁系统参数优化不仅是进行参数测试的必要条件,也是电网参数优化的重要环节。目前,山西省正在运行机组励磁系统的接线种类虽然繁多,不同接线方式、不同励磁控制校正环节给现场参数调整及优化都带来很大的工作量。利用电力系统分析计算程序搭建模型可以在现场试验前进行参数预整定。
1 励磁控制校正环节分类
励磁控制的校正环节实现励磁调节和稳定控制功能。校正环节一般有串联型PID校正环节、并联型PID校正环节、软反馈校正环节和励磁机时间常数补偿环节。PID调节器又称PID控制器,是比例P(Proportional)、积分I(Integral)、微分D(Differential or Derivative)控制的简称。
1.1 串联型PID校正环节
串联型PID校正环节模型见图1。K V设置为1时校正环节由两级超前滞后环节组成,KV设置为零时校正环节带纯积分环节,实现无差调节[1]。

图1 串联型PID校正环节
1.2 并联型PID校正环节
并联型PID校正环节模型见图2。
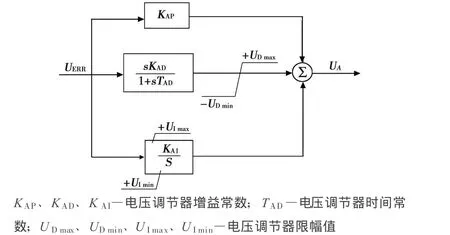
图2 并联型PID校正环节
1.3 软反馈校正环节
软反馈校正环节模型见图3。软反馈环节输入信号在静止励磁系统中为调节器输出U R,在励磁机励磁系统中可以是励磁机磁场电流信号Uie,或者发电机磁场电压U f。软反馈环节输出信号加到电压相加点或者PID校正环节的输出。
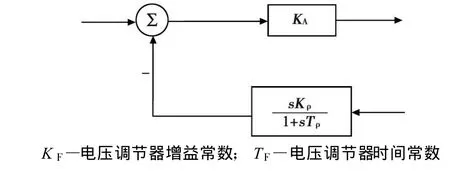
图3 软反馈校正环节
1.4 励磁机时间常数补偿环节
励磁机时间常数补偿环节用以减少励磁机等效时间常数。励磁机时间常数补偿环节的输入信号为发电机磁场电压或励磁机磁场电流信号,反馈到PID校正环节的输出,见图4。
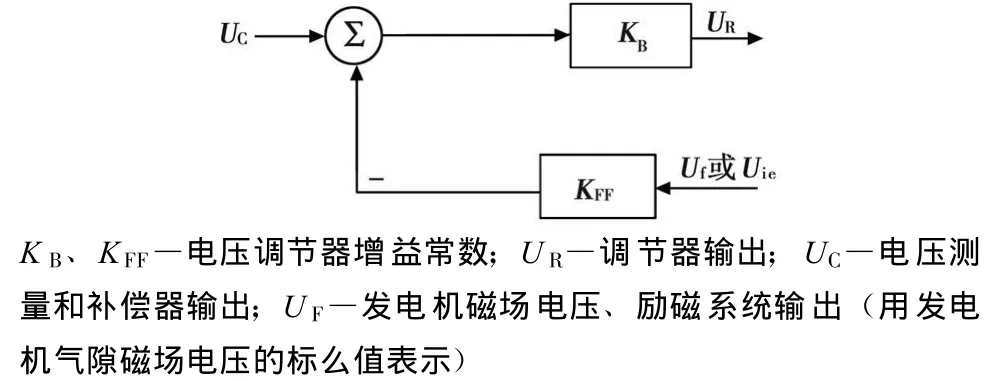
图4 励磁机时间常数补偿环节
2 PID调节原理
目前,山西省发电厂在役机组励磁调节器多采用图1、图2的PID数学模型。在PID调节器作用下,对误差信号分别进行比例、积分、微分控制。调节器的输出作为被控对象的输入控制量。
PID参数的整定就是合理地选择 PID 3个参数。从系统的稳定性、响应速度、超调量和稳态精度等各方面考虑问题,3个参数的作用如下。
a)比例控制是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。当仅有比例控制时系统输出存在稳态误差STR(Steady-State Error)。比例参数K P的作用是加快系统的响应速度,提高系统的调节精度。随着KP的增大,系统的响应速度越快,调节精度越高,但是系统易产生超调,稳定性变差,甚至会导致系统不稳定。K P取值过小,调节精度降低,响应速度变慢,调节时间加长,使系统的动静态性能变坏。
b)在积分控制中,控制器的输出与输入误差信号的积分成正比关系。为了消除稳态误差,在控制器中必须引入 “积分项”。积分作用参数T i的一个最主要作用是消除系统的稳态误差。T i越大系统的稳态误差消除的越快,但T i也不能过大,否则在响应过程的初期会产生积分饱和现象。若Ti过小,系统的稳态误差将难以消除,影响系统的调节精度。另外,在控制系统的前向通道中只要有积分环节总能做到稳态无静差。从相位的角度来看一个积分环节就有90°的相位延迟,也许会破坏系统的稳定性[2]。
c)在微分控制中,控制器的输出与输入误差信号的微分 (即误差的变化率)成正比关系。微分作用参数 T d的作用是改善系统的动态性能,其主要作用是在响应过程中抑制偏差向任何方向的变化,对偏差变化进行提前预报。但 T d不能过大,否则会使响应过程提前制动,延长调节时间,并且会降低系统的抗干扰性能。
3 参数的整定
PID控制器的参数整定是控制系统设计的核心内容。根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。PID控制器参数整定的方法很多,概括起来有两大类,一是理论计算整定法,主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。二是工程整定方法,主要依赖工程经验,直接在控制系统的试验中进行,且方法简单、易于掌握,在工程实际中被广泛采用。采用电力系统计算程序可以将上述两种方法进行有机结合,既可以保证参数调整的准确性,又可以减少现场试验的风险和时间[3]。
以某自并励机组为例 (PI调节),PID控制器采用并联型PID,计算用主要参数见表1,调节器参数见表2,其中,发电机饱和系数等部分参数采用折算后参数,仿真采用电力系统分析综合程序,调节器模型采用12型,计算相关用参数可以采用现场实测参数或厂家提供原始参数,采用实测参数可以提高仿真精度,同时,完成测试及参数调整工作。
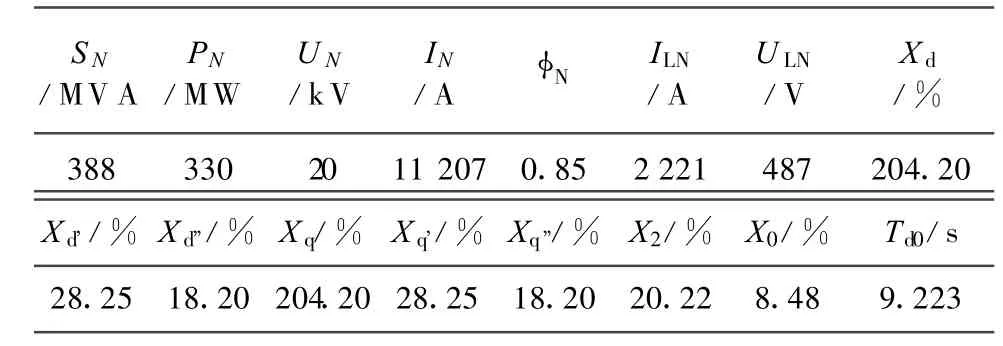
表1 计算用发电机和励磁变参数
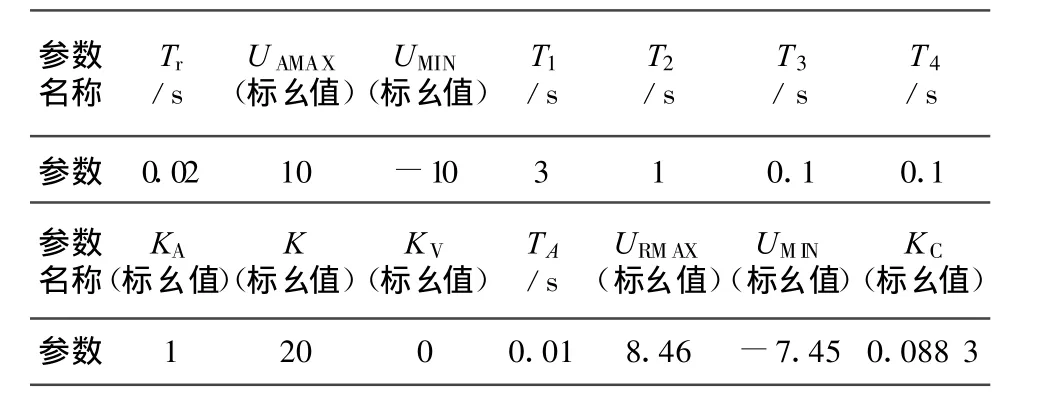
表2 计算用仿真参数
通过典型参数或者采用理论计算参数法进行仿真计算,选定一组或多组参数,进而通过实际工程检验进行验证,因采用仿真程序参数的调整不受现场条件限制,可以节省机组空转时间,降低燃料消耗,同时,根据需要进行参数的优化。图5、图6是采用不同PID参数的仿真效果,因采用 PI调节,仿真可只调整PI参数,需采用PID调节时调整微分环节方法同。
根据仿真选用K P=60,K I=20参数进行现场校核试验,实测波形图见图7,参数比对见表3。
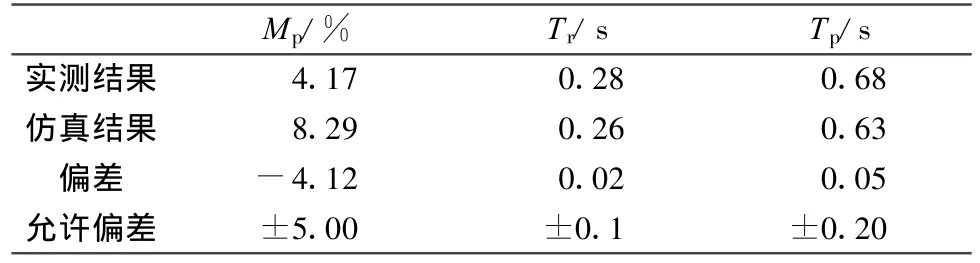
表3 计算及仿真参数比较
4 结论
a)采用电力系统计算程序对PID参数调整可以减少现场试验的时间,增加参数的选择范围。
b)采用电力系统计算程序进行PID参数整定,要求提前参数的准备及计算,要求提供的参数准确。
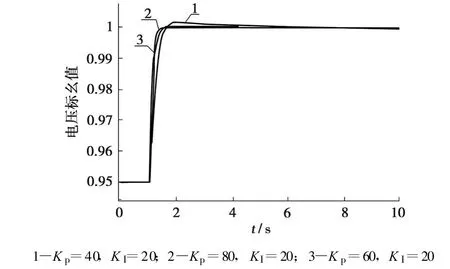
图5 不同K P对仿真效果的影响
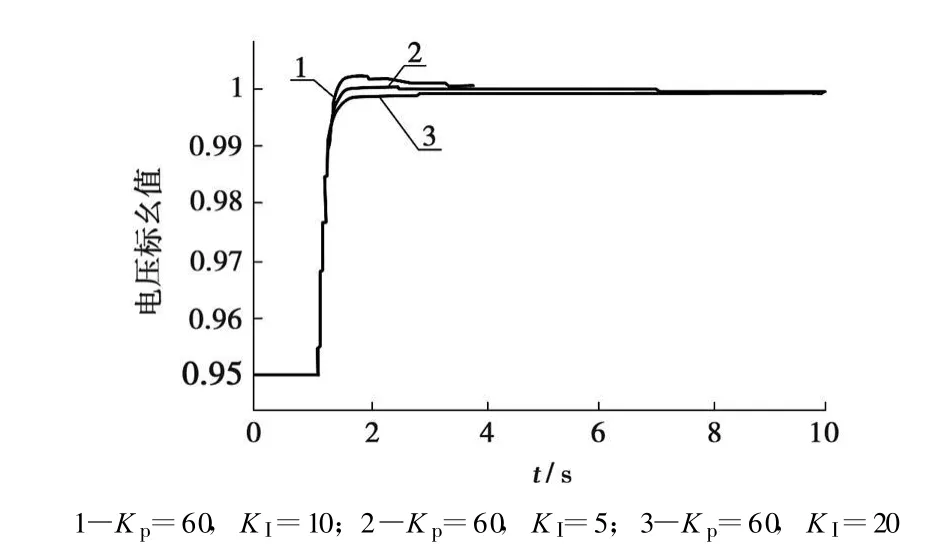
图6 不同K I对仿真效果的影响
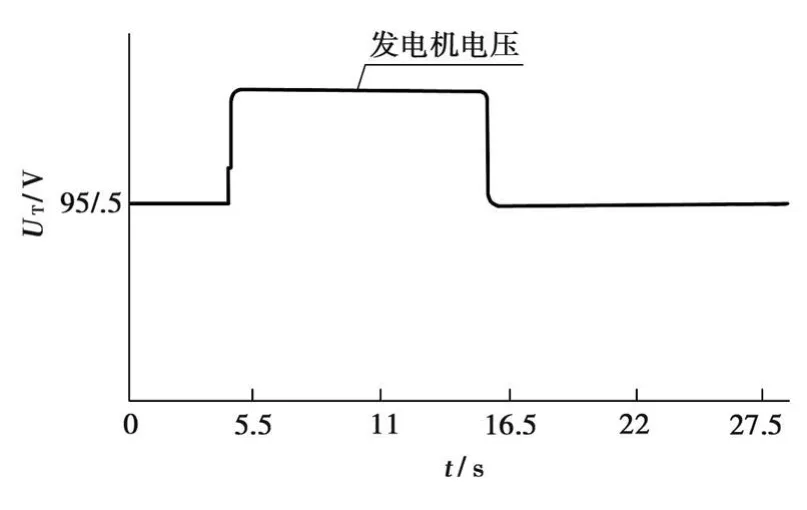
图7 发电机空载5%阶跃测试波形
c)采用电力程序进行PID参数整定可以配合励磁系统的参数实测及建模工作进行,尤其对参数优化是有力的工具。
[1] 浙江省电力试验研究院.GB/T 7409.2—2008 同步电机励磁系统电力系统研究用模型[S].北京:中国标准出版社,2008:5-6.
[2] 黄忠霖.控制系统Matlab计算及仿真 [M].北京:国防工业出版社,2004:322-323.
[3] 竺士章.发电机励磁系统试验[M].北京:中国电力出版社,2005:170-176.
Using PSASP to Tune the Parameters of Excitation System
WANG Lin1,ZHAIXiao-jia2
(1.CPINorth China Power Engineering Co.,Ltd,Taiyuan,Shanxi 030001,China;2.Taiyuan Power Supp ly Company,Taiyuan,Shanxi 030001,China)
The tuned parameters of generator excitation system have direct influence on the safeoperation of generator and power grid.A t the same time,parameter tuning plays an important ro le in parametric test and modeling.A ccording to excitation system modeling and its parameters tuning,themethod of parameters p resetting and adjustment using PSASPw as introduced.The excitation system modeling and parameters testing w ere combined.The problem of needing too much time for excitation system parameters tuning in fie ld was resolved,and parametersmodeling and testing cou ld be combined effectively.
excitation system;parameters;testing;modeling
TN761+.11
A
1671-0320(2010)05-00059-03
2010-07-05,
2010-07-28
王 琳 (1974-),男,山西汾阳人,1996年毕业于东北电力学院电力系统及其自动化专业,工程师,从事电力系统继电保护专业;
翟晓佳 (1985-),女,山西大同人,2008年毕业于华北电力大学自动化专业,助理工程师,从事变电运行专业。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
核科学与工程(2021年4期)2022-01-12
大电机技术(2021年6期)2021-12-06
河北电力技术(2021年2期)2021-07-29
重型机械(2019年3期)2019-08-27
防爆电机(2019年1期)2019-01-25
电子制作(2018年1期)2018-04-04
电测与仪表(2016年23期)2016-04-12
水电站机电技术(2014年4期)2014-10-13
物探化探计算技术(2014年1期)2014-06-27
