
高速双针平缝机送料机构振动分析
2010-02-23 07:19:16张国庆荆学东
陕西科技大学学报 2010年4期
张国庆, 林 康, 荆学东
(1.台州职业技术学院机电一体化技术研究所, 浙江 台州 31800; 2.浙江宝石缝纫机(控股)集团有限公司博士后工作站, 浙江 台州 318000; 3.陕西科技大学机电工程学院, 陕西 西安 710021)
0 引 言
高速双针工业平缝机中的运动机构是由上轴机构和下轴机构两大机构组成.上轴机构由挑线和刺布机构两分机构组成, 齿形带将上轴的动力传递到下轴各机构中.下轴机构由送料机构和旋梭机构组成,其中送料机构由抬牙和送布机构组成,旋梭机构由与下轴同步的大齿轮经小齿轮啮合升速一倍后带动旋梭运转.上轴机构中的刺布机构对噪声贡献最大, 达39%以上,这主要是由于上轴动不平衡力及针送布摆动动不平衡而引起的强迫振动所致.
缝纫机振动是阻碍缝纫机转速提高的一个关键因素.如何解决缝纫机的振动问题,文献[1,2]做过专门研究,但振动模型假设只是一代而过,并且限定在二维平面上.本文基于多体动力学建立了平缝机的振动模型,并进行了较深入的分析,使抗噪声能力及分析精度得到了提高,有助于解决高速双针平缝机的振动、噪音问题.
1 模型的建立
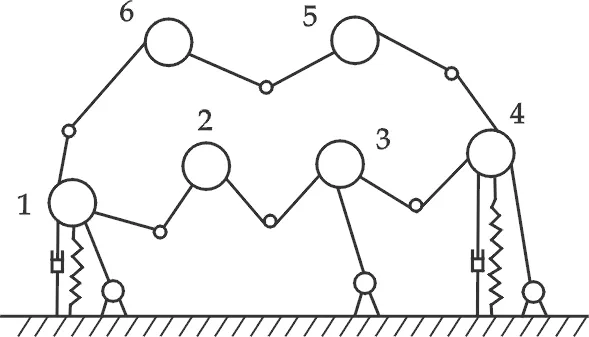
图1 送料机构多刚体系统动力学模型1.送布偏心轮,2.送布摇动连杆,3.倒缝滑块,4.送布曲柄,5.牙架,6.抬牙滑块
送料机构多刚体系统是由送布偏心轮、送布摇动连杆、送布曲柄等刚体用各种形式的联接器连接组成,如图1所示.连接两个刚体的联接器为铰链,每个铰链连接的刚体偶为邻接刚体.
选取系统内每个刚体质心在惯性参考系中的3个直角坐标和确定刚体方位的3个欧拉角作为笛卡尔广义坐标,采用拉格朗日乘子法建立系统的运动方程[3]:
完整约束方程:
φ(q,t)=0
式中:T-系统动能,q-系统广义坐标列阵,ρ-对应于完整约束的拉氏乘子列阵,μ-对应于完整约束的拉氏乘子列阵.
2 动态仿真
2.1 建立分析模型
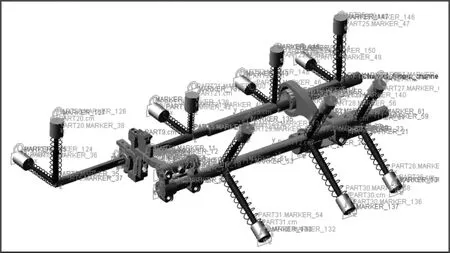
图2 针杆挑线机构虚拟分析模型
采用前面建立的送料机构多体动力学模型在ADAMS中建立相应的虚拟样机分析模型,如图2所示,用弹簧来表示轴套对轴的支撑作用.弹簧刚度参考文献[4]取k=4.9×108N/m,各运动件间添加相应的约束,以实现各构件之间的相对转动或平动.
2.2 运动分析
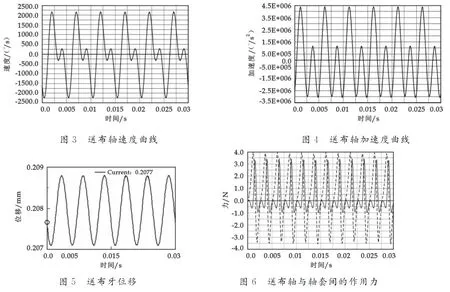
施加下轴转速为2 000 r/min,经ADAMS动力学仿真分析得到如图3~图6所示的对应曲线,可见,送布轴速度呈周期性变化,送布牙的位移也呈周期性变化,机构工作相对稳定.因整个机构的动不平衡引起轴与轴套间的作用力如图6所示,该作用力波动较大,不利于机构的稳定工作.
3 振动响应分析
根据实验测得的主轴扭矩在主轴上施加幅值为2 N·m的激励信号进行振动分析[5],初始相位为0,以快速扫频方法进行振动分析.在ADAMS/Vibration中系统受到激振后,得到下轴、送布轴振幅随频率变化的频率响应曲线,如图7、图8所示,可见频率响应的幅值曲线由于系统模态固有频率改变而造成突变.
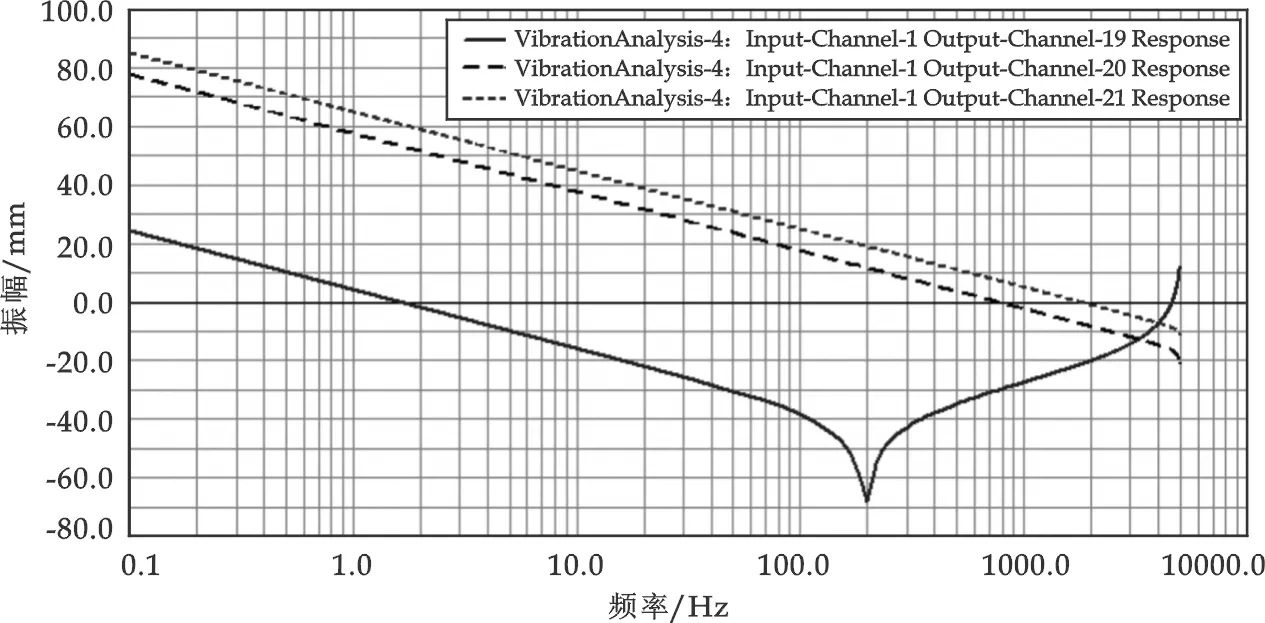
图7 下轴X、Y、Z方向振幅随频率变化的频响曲线
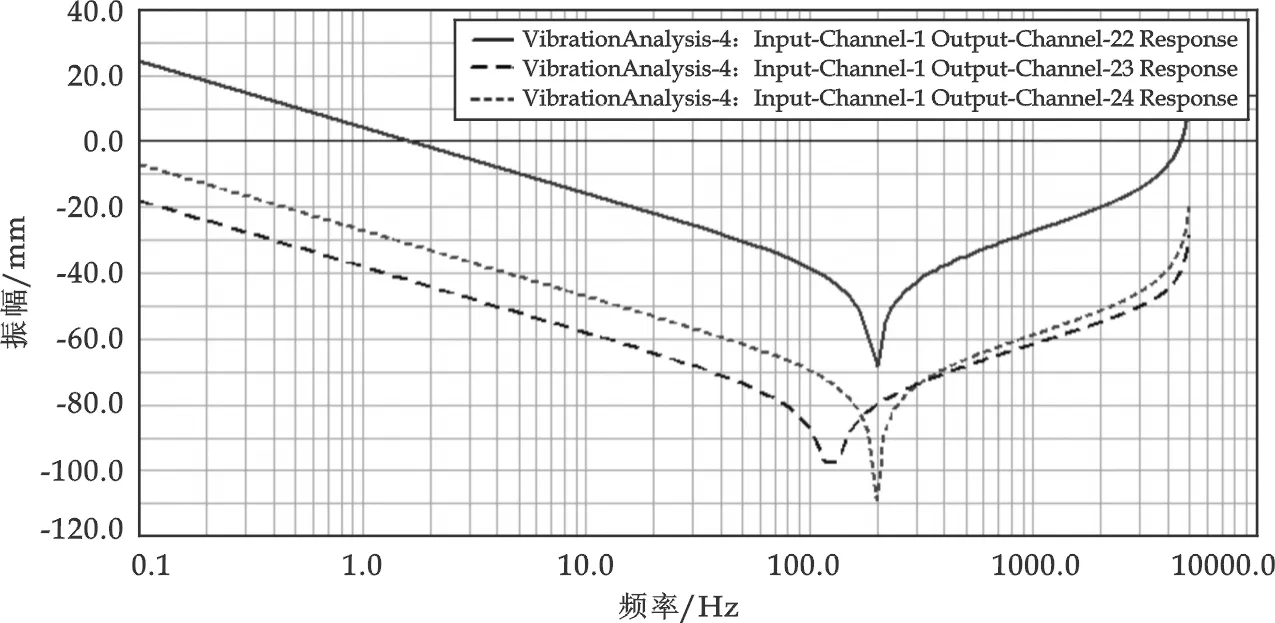
图8 送布轴X、Y、Z方向振幅随频率变化的频响曲线
4 结束语
本文建立了送料机构的多体动力学分析方程,利用ADAMS软件探明了振动系统参数在不同的激励频率下对机身振幅和基础振幅的影响,为双针平缝机的进一步优化设计和减振隔振设计以及降低噪音提供了理论依据.
通过对送料机构进行动力学分析,得出了送料机构的运动特性,机构在工作过程中基本能满足要求,但机构因振动会产生一定的位移波动,可能导致机构工作性能也出现波动,同时还会引起机身也产生振动.另外由于机构的动不平衡造成的主轴与轴套间的冲击力也不利于机构的稳定工作,应采取措施尽量使机构达到平衡.
系统在1 000~5 000 Hz之间响应情况比较丰富,工作时应尽量避免送料机构在该频率范围内运行.
参考文献
[1] 山静民,姜凤珍.工业缝纫机的动载荷识别[J].西北轻工业学院学报,1986,(1): 37-44.
[2] 彭国勋,山静民,姜凤珍.高速缝纫机的动平衡[J].西北轻工业学院学报,1987,(2):14-25.
[3] 袁士杰,吕哲勤.多刚体系统动力学[M].北京:北京理工大学出版社,1992.
[4] 靳广虎,朱如鹏,朱自冰,等.正交面齿轮传动系统的耦合振动分析[J].机械科学与技术,2009,28(1):124-132.
[5] 朱春霞,朱立达,刘永贤,等.基于ADAMS的并联机器人振动特性仿真及结构优化[J].系统仿真学报,2008,20(14):3 721-3 725.
猜你喜欢
高师理科学刊(2020年2期)2020-11-26 06:01:32
趣味(语文)(2018年8期)2018-11-15 08:53:00
北京航空航天大学学报(2017年1期)2017-11-24 05:22:11
少年博览·小学低年级(2017年8期)2017-09-29 17:37:39
股市动态分析(2016年24期)2017-01-07 08:56:09
股市动态分析(2016年4期)2016-09-29 08:42:21
股市动态分析(2016年25期)2016-07-23 07:31:08
物理实验(2015年10期)2015-02-28 17:36:56
机械工程师(2015年10期)2015-02-02 01:14:29
地震研究(2014年1期)2014-02-27 09:29:47
