雷达目标点迹分裂与改进的点迹提取器设计
2010-01-29 06:18刘树锋
电子科技 2010年1期
刘树锋
(中国船舶重工集团第 723研究所,江苏扬州 225001)
随着雷达技术的飞速发展,对雷达目标信息录取的要求也越来越高,要求雷达能在复杂的环境下对目标进行准确判别和稳定跟踪,而这一工作与雷达目标的点迹提取息息相关,点迹提取是雷达工作的重要组成部分,其主要功能是对目标回波信号进行门限判别,产生距离、方位的估值,估值结果录取到缓存后送至后续设备进行态势显示[1]。点迹提取工作的好坏,直接影响后级数据处理计算机对目标的跟踪的准确性。对于某特体雷达而言,其点迹提取器的设计功能单一,仅具备门限判别的功能,而未考虑对目标点迹的凝聚处理,导致在终端显示设备上观察目标时目标分裂的现象时有发生,影响雷达对目标位置的准确判别。本文通过对目标分裂现象的分析,提出一种适合该雷达的点迹提取器的设计方法,以抑制目标分裂现象的发生,提高雷达跟踪目标的准确性。
1 目标分裂分析
所谓目标分裂是指雷达对同一目标的一次扫掠过程中,回波信号经信号处理后表现为两个或两个以上目标的现象,也就是说雷达把同一个目标判成几个目标。目标分裂又可分为方位上分裂和距离上分裂两种。方位分裂是指某一目标在同一距离,不同方位上被判为多个目标;距离分裂是指某一目标在同一方位,不同距离上被判为多个目标。目标的分裂可只在距离或方位上出现,也可同时在方位和距离上出现[1-2]。
1.1 距离分裂的原因分析
由于该特体雷达使用脉冲压缩技术,目标回波信号经过脉压处理之后,得到满足距离分辨要求的窄脉冲信号,信号的包络近似为辛克函数,具有辛克函数的性质,即除主瓣外还有在时间轴上延伸的一串副瓣,靠近主瓣的第一副瓣最大,其值较峰值只低13.4 dB,第二副瓣再低 4 dB,以后依次下降。即脉冲压缩导致距离副瓣的存在,当距离副瓣同主瓣一同被检测出来时,将导致在雷达终端显示设备上观察目标时发现副瓣点迹在主瓣点迹两侧对称出现,且副瓣点迹相对较弱,这就造成目标在距离上的分裂。
另外,由于雷达测距的误差和目标速度的存在,使得一个目标所返回的一串视频回波在时间上不可能完全一致,这样回波经信号处理以后输出的同一个目标信号有可能分布于相邻的几个距离单元上,从而对同一个目标在不同距离单元上均检测出目标,同样会造成目标在距离上的分裂[2]。
1.2 方位分裂原因分析
该特体雷达为搜索雷达,工作时天线连续旋转对周围空域进行扫描,天线波速水平宽度为 θ,雷达对同一目标扫描得回波脉冲串为N个,这些回波经信号处理后形成目标原始点迹,携带目标的方位、距离、强度信息。由于天线的连续转动使得脉冲串起始点迹携带方位信息与脉冲串终止点迹携带方位信息相差约为 θ,其次由于天线水平波束副瓣的影响,还可能使目标在方位上的拓展超过 θ,另外由于天线图由于各种原因存在较深的凹口,收到的回波将可能被分为多段,若将这些点迹不加处理的送至终端显示设备,将会很容易造成目标在方位上的分裂。
2 目标点迹提取器设计
该特体雷达现用点迹提取器用于终端设备,提供与终端预处理系统的接口,主要功能是接收终端预处理系统发送的目标信息,并进行门限判别,然后将过门限的目标点迹信息通过计算机总线送到计算机内存,由计算机进行目标航迹处理和目标态势显示。系统如图1所示。

图1 系统框图
由图可见该特体雷达点迹提取器的功能简单,仅具备门限判别的功能,而未考虑对目标点迹的凝聚处理,这是导致在终端显示设备上目标分裂现象的重要原因,新的点迹提取器的设计考虑对目标分裂的抑制处理,在目标点迹门限判别后添加目标距离凝聚、目标距离修正、目标方位凝聚等处理以抑制目标分裂现象的发生,其系统结构如图2所示。
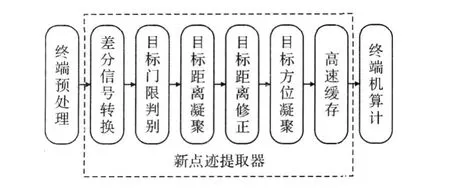
图2 系统结构图
2.1 门限判别
点迹提取的门限判别通常称为数字门限判别,数字门限是通过对点迹提取器收到的目标回波的强度进行判别,当回波强度大于某一数值时则判定该回波代表一个目标,否则将不予接收,其目的时虑除一些弱小回波,降低虚警概率。由于数字门限设置的高低直接影响点迹提取器收到目标原始点迹的数目多少,所以设计采取终端计算机控制的方法实现,在实际使用中,操作人员可以通过终端软件适当调整数字门限,以达到较好效果。
2.2 目标距离凝聚
对于目标在距离上的凝聚,根据目标距离分裂的分析采用以下方法抑制:首先对同一可分辨方位内连续的目标原始点迹数据,按单个目标在距离上的延续找到其峰值,判断与峰值点迹连续范围内点迹是否符合脉冲压缩的距离主副瓣的比例关系,若符合则虑除距离副瓣点迹,并向该距离单元赋一个新值,所赋值为相邻两个距离单元强度值的均值,以保证目标点迹的连续性;若目标原始点迹数据不符合脉冲压缩的距离主副瓣的比例,则保留相应点迹。然后对连续的目标原始点迹数据按单个目标在距离上的延续由近到远逐单元访问,查找连续点迹的峰值,其峰值个数代表该连续点迹所含实际目标个数,具体通过判断点迹强度在距离维上的增量来实现,在点迹起初处每一距离单元相对于上一距离单元目标点迹的强度要大,即各距离单元的强度增量为正数,当访问越过峰值后,各距离单元的强度增量为负数,在下一步访问中,若发现强度增量又变为正数或为零时则截断点迹,即认为已访问过的点迹属同一目标,并对这些点迹采用质量中心法进行凝聚。对于剩余的点迹重复上述步骤进行处理,直至完成对所有距离单元的访问。
距离质量中心算法的公式[3]为

其中,Ri为同一可分辨方位角内存在连续点迹的距离,Ai为相应距离单元的目标幅度。如果把目标回波的强度想象成理想质点的质量,则上式与物理学中计算一维物体质量中心的公式相同,故名“质量中心算法”。质量中心法充分利用了目标回波的幅值信息,具有较高的估计精度[3]。
2.3 目标距离修正
上述目标点迹在距离上的凝聚只是目标原始点迹在同一可分辨方位上距离的凝聚,并没有真正把目标原始点迹凝聚成单一距离点,在距离和方位上还可能存在多个连续点迹,值得注意的是,此时目标点迹的连续已不是在目标凝聚过程中所描述的同一方位上距离的连续,而是斜向距离—方位单元的连续,表现在距离-方位坐标系中就是一条斜的线段,此时若直接对目标点迹进行方位凝聚,则很可能造成目标的二次分裂,为避免二次分裂现象的发生,在对目标点迹的方位进行凝聚前先对距离凝聚后的目标点迹进行一次距离值修正,即再次采用质量中心法对目标距离进行估计,距离估计不限于同一方位,而是在相邻的多个方位上进行连续点迹的距离估计,可获得目标在距离上的唯一估计值,然后以此唯一估计值为基准,把目标距离凝聚后的连续的目标点迹的距离值均修正为距离唯一估计值,此时,同一目标点迹在距离-方位坐标系中表现为水平线段,方便下一步对目标方位的凝聚处理。
2.4 目标方位凝聚
目标原始点迹经距离凝聚和距离修正处理后,已虑除脉冲压缩副瓣产生的点迹,留下的是距离相等而方位不同的连续点迹,对于这些点迹的凝聚首先按天线图的形状找出包络峰值点,由包络峰值点向下作门限切割,保留 3 dB宽度内的点迹数据,虑除其余点迹,然后对保留下来的点迹在方位上逐单元访问,查找连续点迹的峰值,其峰值个数代表该连续点迹所含实际目标个数,同距离凝聚处理一样通过观察点迹强度增量的变化来截断不同目标的点迹,并对这些点迹采用质量中心法进行凝聚。
方位质量算法的公式为
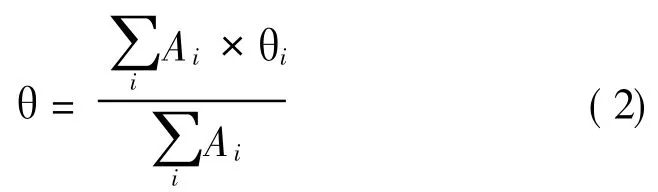
其中,θi为同一可分辨距离内存在连续点迹的方位,Ai为相应方位单元的目标幅度。通过目标点迹在方位上的凝聚可获得同一目标在方位上的唯一估计值。
这样最终可得目标在距离-方位坐标系上的唯一估计值,以确保雷达对目标位置准确显示。
3 结束语
目标分裂造成目标点迹个数增加,增加了航迹相关处理的工作量,由于航迹处理机可处理的点迹是有限的,目标分裂造成点迹增加容易使处理机过载,影响了对后续目标的正确处理,以及雷达对目标的跟踪质量,从而影响整个雷达的性能。本文针对某特体雷达点迹提取器的缺陷提出适合该雷达的比较完善的点迹提取器的设计,可有效抑制目标分裂现象的产生,提高雷达对目标的判别和跟踪能力。
[1] 吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
[2] 贺士廉.克服小滑窗检测中目标分裂的方法[J].雷达与对抗, 1995(4): 156-159.
[3] 蔡晨曦,王祖斌,王秀坛,等.远程警戒雷达点迹提取算法[J].清华大学学报:自然科学版,2002, 42(7):607-611.
[4] 王贵友,吴增辉.一种新型三坐标雷达点迹提取器的设计[J].现代雷达, 2002,11(6): 59-63.
[5] 翟刚毅.基于多DSP的雷达自动检测及点迹凝聚的设计与实现[J].雷达与对抗,2008(2):33-35.
[6] 杨华明.一维相扫体制三坐标雷达的点迹提取[J].雷达与对抗,1996(1):19-22.
[7] 陈志坚.雷达数据处理中非真实目标点迹的处理[J].现代雷达, 1995(3): 44-48.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
成都信息工程大学学报(2022年4期)2022-11-18
汽车实用技术(2022年4期)2022-03-07
幼儿园(2021年12期)2021-11-06
北京航空航天大学学报(2021年9期)2021-11-02
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
火力与指挥控制(2019年4期)2019-06-14
中国修辞(2016年0期)2016-03-20
火控雷达技术(2016年2期)2016-02-06
雷达与对抗(2015年3期)2015-12-09