基于图像的高速摄像自动触发方法研究
2010-01-20 06:38:52李玉广
火炮发射与控制学报 2010年4期
李玉广,张 志
(1.解放军61764部队,海南三亚 572013;2.国防科学技术大学航天与材料工程学院,湖南长沙 410073)
基于图像的高速摄像自动触发方法研究
李玉广1,张 志2
(1.解放军61764部队,海南三亚 572013;2.国防科学技术大学航天与材料工程学院,湖南长沙 410073)
针对传统通过人工触发控制高速摄像机拍摄子母弹飞行过程来评估子母弹毁伤效能的方法受触发人员、天气和环境的影响比较大且不能实现无人值守这一现状,提出了一种通过判断靶场中子母弹和烟雾的状态进行高速摄像自动触发的方法。该方法应用自适应混合高斯模型来更新背景图像,采用数字减影法、OTSU阈值分割算法实现背景图像中目标的分割,统计分割后目标图像的面积,直线拟合连续帧统计的结果,最后给出系统触发条件。实验结果表明:该方法能够满足靶场实验实时性和可靠性的要求。
摄影测量与遥感技术;高速摄像机;目标;图像分割;自动触发
子母弹是一种新型的高性能武器装备,它能有效地对付战场上的群目标(如坦克群和大量的装甲车辆等)和面目标;其战斗部相比普通武器战斗部威力散布面积更大,采用多弹头还可以加大敌方拦截的难度,大大提高突防能力,因此子母弹在未来战争中具有非常重要的作用[1]。为了定量地评价子母弹的作战效能指标,用高速摄像测量子弹飞行动能和子弹散布参数,以此评价其毁伤效能是常用的方法。过去,摄影机主要采用人工触发方式,因弹道飞行时间长,落点触发时间难于掌握,漏测较多,急需改进。
根据高速摄像机循环存储记录数据的特点,要准确、实时地获取子弹飞行图像,需要一种机制准确触发高速摄像机进行存图。基于靶场试验中子母弹在空中飞行时间长,在落地之后有大量烟雾发生这一特点,本文提出了一种通过判断子母弹和烟雾目标状态来进行高速摄像机自动触发的方法。该方法首先提取落点环境背景图像,然后运用背景差分法对可能的目标区域图像进行检测,接着对提取到的目标区域进行分隔,统计分割后目标图像的面积,直线拟合连续帧统计的结果,最后对子母弹和烟雾目标进行识别并给出触发信号。
该方法利用像机捕获视频图像,通过图像数据的实时处理给出触发信号自动触发像机存图,摆脱人工判断触发的困扰,解决了漏测问题,具有重要工程意义。
1 高速摄像机工作模式
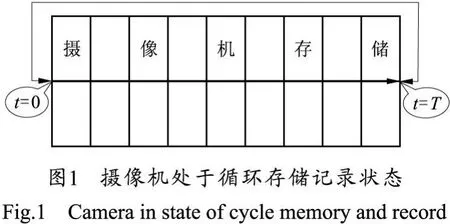
高速摄像机处于循环存储记录状态如图1所示(其中T代表摄像机存储拍摄图像的时间),直到收到触发停止信号才存储收到停止信号前数秒的图像,并把图像数据经控制计算机转移到系统硬盘里。
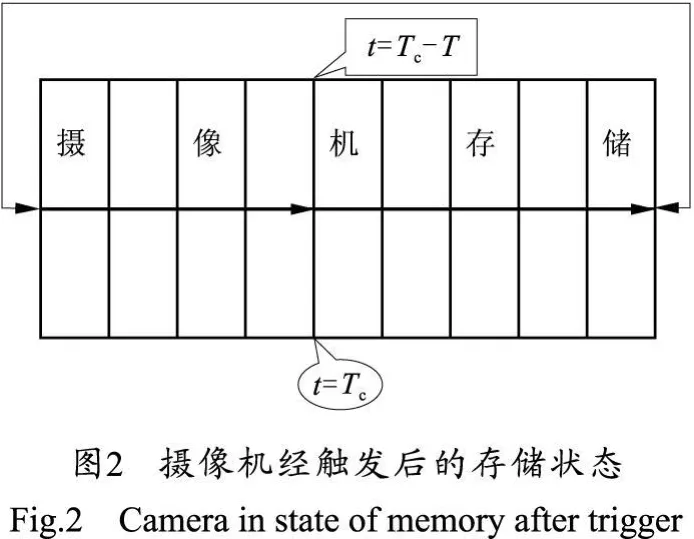
经触发后的存储内容包括时间(Tc-T)至时间(Tc)的图像如图2所示,其中 Tc为产生触发信号的时间。
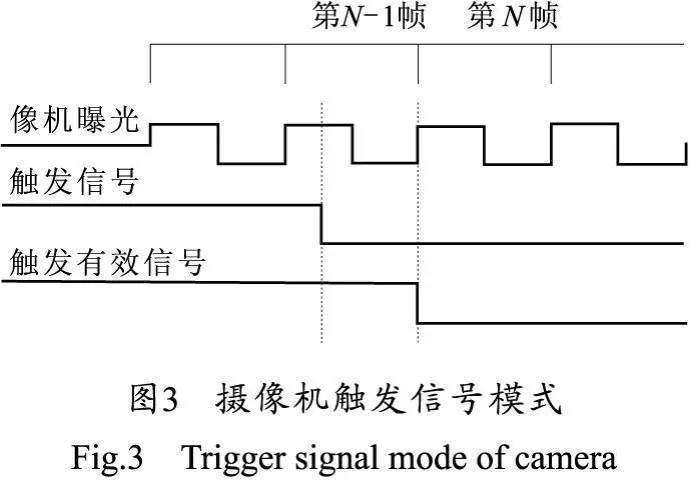
高速摄像机触发信号模式如图3所示。
2 背景图像提取
运动目标检测的关键是背景的提取,背景提取的好坏直接影响到运动目标检测的准确度,影响到进一步分析视频图像信息的可靠性,因此,须选择合适的背景提取算法。
考虑到实际场景的光线变化,其他不明物体进入视场等因素的影响,采用了改进的自适应多高斯混合[2]的背景提取方法。该算法对每个图像点的颜色值建立多个高斯分布(文中提到的图像点均是针对同一图像点而言),并对每一时刻的高斯参数进行更新,并对图像点新的颜色观测值进行评估,确定新的观测值是否为背景点,对不能与背景像素高斯分布相匹配的新像素值,把它分类为可相关点,对这些可相关点在后续的帧图像进行跟踪。具体过程如下:
假定多高斯混合模型由 N个高斯分布模型构成,每一个高斯分布的概率Pk(Xt)如公式(1)所示,其中Xt是t时刻图像点颜色值,μk,t是t时刻第k个高斯分布的均值。
进一步,第k个高斯分布在多高斯混合分布中所占的权值为:

则第k个高斯分布具有的优先级为:

式中:σk,t为t时刻第k个高斯分布的标准差。
高斯分布的概率密度函数表达式如下:

对于多高斯混合模型来说,更新背景只需更新高斯分布自身参数和各个分布的权值及优先级。当获取了新的观测值Xt时,需要与已经存在的高斯分布相匹配,若与其中任意一高斯分布匹配不成功,则去掉优先级最小的一个高斯分布,引入一新的高斯分布,此时高斯分布的均值和方差保持不变,权值更新为:

当新的观测值Xt与其中的一个高斯分布相匹配,则高斯分布的参数和权值更新如下:
式中:q,ζ表示更新率,即分布参数的更新速度。
各高斯分布总是按优先级从高到低排列,可通过对高斯分布的概率密度函数设定阈值来区分前景点与背景点。当y(Xt,μk,t,σk,t)大于此阈值时,即可判定颜色值为Xt的点为背景点,反之为前景点,此时是概率阈值。
3 目标图像识别
当提取到当前帧图像的背景图像后,即可利用数字减影法[3]检测出帧图像的目标区域,即将两幅图像直接相减,若两幅图像完全一致,则得到一幅全零的图;若两幅图像虽背景相同,但有一目标在运动,则得到背景处为零而目标不为零的图像。
实验中,像机处于静止状态,可将后续拍摄到的图像与背景图像相减,理想情况下这就可以得到背景为零,目标区有灰度的图像,可以很方便地得到目标的位置和边界,从而对后续目标的识别奠定了很好的基础。但实际拍摄中,由于像机,环境变化等引起的噪声干扰,得到的背景图像和后续拍摄到的图像均含有噪声,在对后续拍摄到的图像与背景图像相减结果中,并不会出现所有背景区域的灰度值为零,前景点均被检测出来的情况,因此需对目标图像进行分割。
数字减影法得到的图像,它的直方图不是连续分布的,其灰度的概率密度函数 p(x)也不是连续的,再则考虑到阈值分割的速度与效果,本文采用OTSU法[4]对数字减影法后的图像进行分割。设f(x,y)为M×N图像(x,y)点处的灰度值,灰度级为1~h。把直方图在某一阈值处分割为两类,当被分成的两类间方差最大时决定阈值。设灰度级为i的像素数ni,则图像中所有的像素数为:


用灰度级j(j≤h)将灰度值分为两类:C0和C1,其灰度级分别为1~j和j+1~h,类C0的概率为w0,灰度均值为 μ0;类C1的概率为w1,灰度均值为 μ1。
各灰度级的概率为:
式中:μ为全部像素灰度平均值:


对得到的阈对图像进行二值化,低于阈值的像素值置0(黑色),反之置1(白色),这样便实现了目标的分割。
对得到的上述二值图像,统计其中像素值为1的个数。本实验采取判断子母弹落地产生的烟雾作为触发判断条件。但烟雾随时间灰度值改变剧烈,形状不固定,灰度重心不稳定,烟雾面积由于扩散与背景灰度相一致等影响也会出现大的变化。同时考虑到不明物体可能进入视场,但不明物体几乎都是固定不变的形状,可以采取在一段时间内图像面积有一恒定扩大的趋势这一烟雾独有的特性来判断触发条件。对连续n帧图像烟雾面积的统计结果进行直线拟合,当直线拟合的斜率连续m次都是正值时,可以
可以用下面等式验证算法的正确度。

两类间方差表达式如下:

则自动选择的阈值Ω表达式如下:判断出烟雾的出现。此时再对该时刻的烟雾面积设置阈值,如果烟雾面积大于此阈值,则可以判断出该时刻即为烟雾产生时刻,否则烟雾没有产生。
4 实验结果及分析
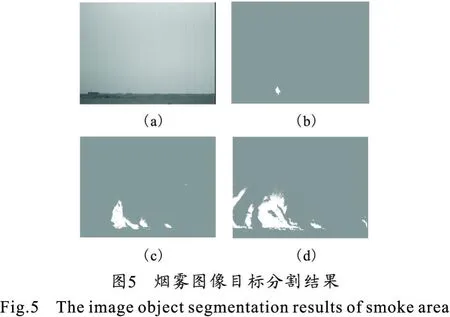
实验选用 V500板卡,视频图像大小 768×576,视频图像25帧/秒,实验算法处理速度25帧/秒(普通摄像机信号处理的结果,并不是取自高速摄影机)。下面选取4个时刻烟雾的原始图像,如图4所示,(a)为开始时的背景图像,(b)为子母弹落地时烟雾开始产生的图像,(c)为烟雾变化较剧烈时的图像,(d)为判断出烟雾时刻的图像,分别进行数字减影,再经过OTSU法处理,得到的二值图像如图 5(a)、(b)、(c)、(d)所示 。

接着对每帧图像烟雾面积进行统计并进行直线拟合,选用12点拟合得到结果如图6所示。
在对连续12帧图像面积进行拟合,且斜率连续16次均为正值的情况下,可以判定有烟雾发生,给出触发信号,停止高速像机的拍摄,即可保存子母弹落地之前一段时间的序列图像。得到正确清晰的序列图像是后续子母弹飞行参数获取的关键。

5 结 论
本文提出了一种基于图像的高速摄像自动触发方法。该方法采用了自适应混合高斯模型更新背景图像,运用数字减影法提取运动的目标,由于噪声等影响,采用OTSU阈值分割法分割出目标区域,最后对连续帧目标图像面积进行直线拟合确定触发条件。实验结果表明:该方法能克服外部因素的影响,诸如光照变化、噪声干扰等等,具有自动、实时和可靠的特点,能够应用于子母弹毁伤效能评估实验。
References)
[1]段丰安,王朝志,王辉,等.爆破子母弹战斗部毁伤威力场研究[J].战术导弹技术,2003(3):37-44.
DUAN Feng-an,WANG Chao-zhi,WANG Hui,et al.Research on applied filed for explosion submunition[J].Tactical Missile Technology,2003(3):37-44.(in Chinese)
[2]CHRIS STAUFFER,GRIMSON W E L.Adaptive background mixture models for real-time tracking[J].Computer Vision and Pattern Recognition,1999(2):246-252.
[3]于起峰,陆宏伟,刘肖琳.基于图像的精密测量与运动测量[M].北京:科学出版社,2002.
YU Qi-feng,LU Hong-wei,LIU Xiao-lin.The precise measurement and dynamic measurement based on image[M].Beijing:Science Press,2002.(in Chinese)
[4]OBUYUKI OTSU.A threshold selection method from graylevel histograms[J].IEEE Transactions on System,MAN,and Cybernetics,1979,SMC-9,(1).
Research on Automation Trigger Method for High Speed Photographic Device Based on Image
LI Yu-guang1,ZHANG Zhi2
(1.61764 T roop of PLA,Sanya 572013,Hainan,China;2.College of Aerospace and M aterial Engineering,National University of Defence Technology,Changsha 410073,Hunan,China)
Traditional manual-trigger control method of high speed camera was used to shoot flight process of cluster round to evaluate its destroy efficiency.This method suffered from the influence of the staff,weather and environment,and it could not realize unmanned mode.Aimed at this situation,a kind of auto-trigger method was put forward.The method made use of judging the status of cluster round and smokes to carry out high speed camera auto-trigger.The method also made use of adaptive mixture Gaussian model to update background image.Thus the background subtraction method and OTSU adaptive thresholding segmentation algorithm were used to realize target segmentation in background image,and the statistic task after target area segmentation was performed.Combined with straight line fitting statistic results in continuous frames,the system trigger condition was given.The results of experiment proved that this method can meet the requirements of real time capability and reliability in firing range tests.
photogrammetry and remote sensing;high speed camera;target;image segmentation;autotrigger
TJ765.1
A
1673-6524(2010)04-0024-04
2010-06-09;
2010-07-22
李玉广(1983―),男,硕士,主要从事基于图像的精密测量与运动测量研究。E-mail:liyuguanghot@sina.com
猜你喜欢
数字通信世界(2021年3期)2021-04-09 02:05:00
小学阅读指南·低年级版(2021年3期)2021-03-19 06:12:40
湖北理工学院学报(2020年4期)2020-08-22 06:43:26
华人时刊(2019年13期)2019-11-26 00:54:38
当代陕西(2017年12期)2018-01-19 01:42:05
中国公共安全(2017年8期)2017-10-13 08:12:17
计算机应用与软件(2017年4期)2017-04-24 10:39:07
中国公共安全(2017年11期)2017-02-06 05:27:47
办公自动化(2016年18期)2016-12-17 19:32:18
新闻前哨(2015年2期)2015-03-11 19:29:25