
一种多传感器数据融合仿真平台的设计
2010-01-08 07:28王益鸣彭冬亮
杭州电子科技大学学报(自然科学版) 2010年4期
王益鸣,彭冬亮
(杭州电子科技大学信息与控制研究所,浙江杭州310018)
一种多传感器数据融合仿真平台的设计
王益鸣,彭冬亮
(杭州电子科技大学信息与控制研究所,浙江杭州310018)
该文为了适应多传感器数据融合技术的发展,提出了多传感器数据融合仿真平台的系统构建思想,采用结构化分析的软件设计方法,开发了一个通用的,易扩展的数据融合仿真平台。该文主要内容包括:STAGE平台与Visual C++6.0的混合编程,目标航迹的绘制;UDP/IP协议的网络数据通信;融合算法框架的软件设计等等。通过在系统运行的一个算法实例,证明了该仿真平台的有效性和实用性。
传感器;数据融合;软件设计;仿真平台
0 引 言
国外对数据融合技术的研究起步比较早。早在1973年,美国研究就在国防部的资助下,开展了声纳信号理解系统的研究。国内关于数据融合技术的研究则起步比较晚。20世纪80年代初,人们开始从事多目标跟踪技术研究,到80年末才开始出现有关多传感器数据融合技术研究的报道[1-3]。在现代C3I作战系统中,依靠单传感器提供技术已经无法满足作战的需要,必须运用多传感器提供观测数据,实时进行目标发现、优化综合处理,来获取状态估计、目标属性、行为意图、态势评估、威胁分析和辅助决策作战信息。又由于STAGE是关于战情产生、战术仿真和作战训练的开发工具,能够较好的结合多传感器信息融合技术,对现代C3I作战系统的开发具有重要的意义[4-6]。由于影响数据融合效果的因素很多,仅靠研制人员进行定性评估是远远不够的,必须寻找一种有效的方法进行定量的评估。在多传感器数据融合技术研究领域里,相应的理论和算法越来越多。但是目前的仿真平台缺乏兼容性和实时性。所以,构建一个通用、实用的仿真平台对数据融合技术的发展具有相当重要的意义。本文是采用STAGE和VisualC++6.0混合编程技术来构建和设计一种结构清晰、操作简单、功能完备的传感器数据融合仿真平台。
1 数据融合仿真平台的构建
1.1 系统结构
数据融合仿真平台是一个比较复杂的系统,其组成部分多、处理的信息量大、可用的融合算法多、系统内数据流向呈交互性和放射性[7,8]。除了以上特点之外,本系统更加突出在数据融合过程中传感器跟踪目标的实时性强,数据传输快速、可靠,性能稳定的特点。同时设计平台时应遵循以下原则:模块化设计、扩充性强、易选择、便于维护、人机界面友好,并建立便于数据的访问、存储、管理的数据库。因此,本系统首先利用STAGE软件设置仿真所需要的目标航迹和传感器模型,接着使用UDP传输方式,从而减少传输机制的开销,提高数据传输速度,然后把实时数据保存到数据库里同时对其加噪声处理生成传感器数据,接着进行目标航迹融合处理,最后实时显示数据融合前后的航迹并保存,也可以调用数据库中的历史数据,如图1所示。
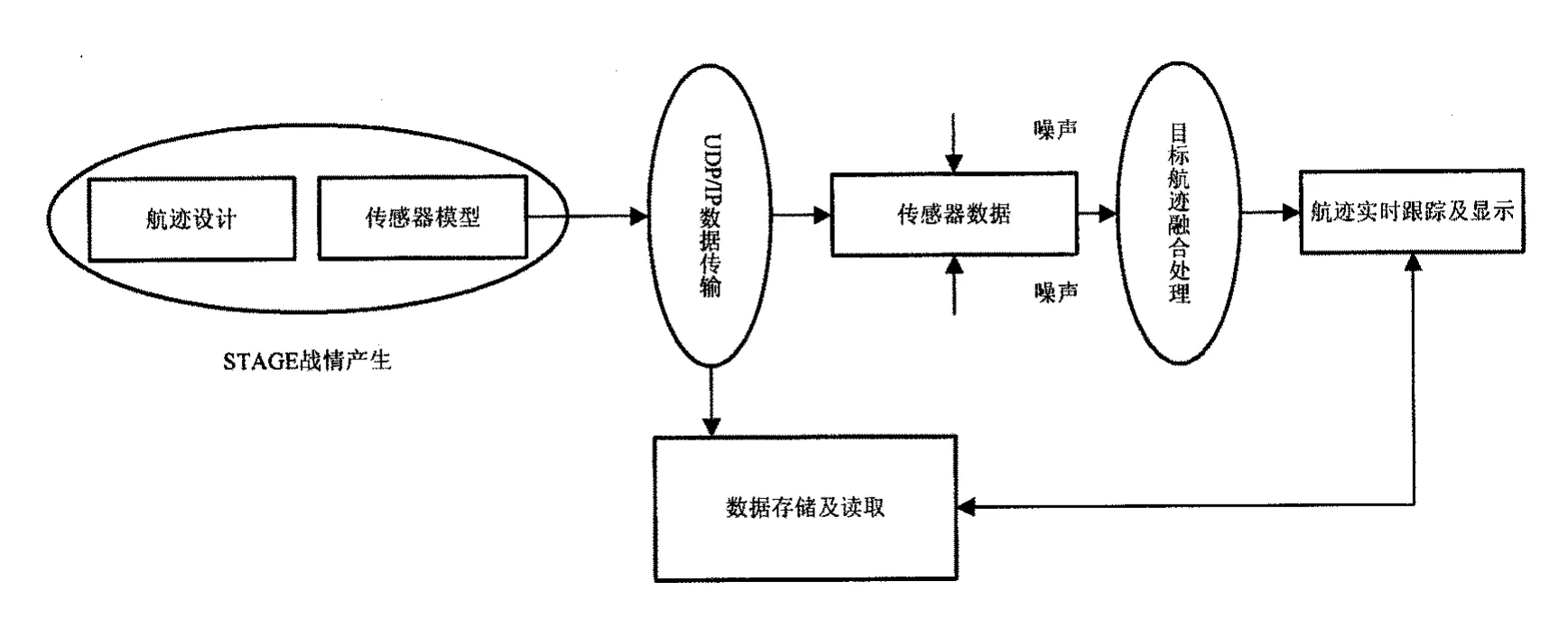
图1 仿真平台的系统功能框架图
1.2 模块分析
本文根据传感器仿真平台设计思想,将其分成6个功能模块:航迹生成模块、数据传输模块、传感器数据模块、融合模块、数据管理模块、控制模块,其系统结构图,如图2所示。

图2 系统结构图
(1)航迹产生模块:STAGE软件提供良好的仿真环境、设置用户所需要的目标飞行轨迹、飞行时间及传感器模型,为数据的实时处理奠定了一个基础。STAGE的其中两个主要组成部分是数据库编辑器和仿真引擎。数据库编辑器用来新建一个用户所需的战情环境。仿真引擎与数据库编辑器通信,对仿真控制命令的响应,输出战情演示的数据即航迹数据产生。
(2)数据传输模块:本文以UDP传输协议为桥梁,实现STAGE与数据融合仿真平台的通信。在融合过程中,目标航迹数据是以设定周期T传送到数据融合仿真平台,从而实现了该平台的数据实时处理功能。
(3)传感器数据模块:因为STAGE本身战情仿真环境产生的航迹数据是不带任何噪声,所以在该航迹的基础之上,进行坐标转换,可根据传感器模型,加入随机噪声,从而达到其传感器探测数据的仿真要求,进一步完善数据融合的数据来源。
(4)数据融合模块:融合中心收集每一时刻的各个传感器航迹点,经过相应的算法处理,形成系统航迹点。
(5)主控模块:在仿真过程中,完成其他各个模块的调度、资源管理及实时显示仿真和评估结果。
(6)数据管理模块:保存各类仿真数据,主要包括对实时数据和历史数据的操作。
2 数据融合仿真平台的软件设计
本系统采用STAGE与Visual C++6.0混合编程来进行开发。STAGE软件使得仿真人员避免了战术场景生成、实时仿真控制、外部通信等一般要求的开发,使其能主要致力于与实际应用相关的特殊需求的仿真开发:用户可利用STAGE的实体迅速建立一个多功能的仿真器圆形,然后集成其它精确的仿真模型,最终形成适合自己需求的仿真系统。这样既减少了开发的难度和风险,又加快了仿真开发的进度。STAGE软件的模块化设计和开放的结构,使得用户可通过友好的界面对其原型进行修改和补充,或者用自己的模型代替其内置的仿真模型,使得仿真更加逼真。STAGE软件提供了对外部仿真器的支持,其网络接口使得它的仿真器能够通过UDP/IP、共享存储或DIS/PDU连接到STAGE。Visual C++6.0,其主要优点程序代码使用率高,可重用性强,是目前编程尤其是复杂程序的编写使用最多的平台。
传感器数据融合仿真平台的航迹产生模块结构,如图3所示,SATGE平台的仿真大体分为三个阶段,仿真前、仿真中和仿真后。

图3 航迹产生结构图
仿真前:建立数据融合仿真平台所需要的目标实体和传感器模型,即设计各个仿真原型的数据结构及属性设置项。在STAGE的DE功能模块中,用户实例化各个仿真原型,并设置STAGE系统仿真场景及显示界面。
仿真中:根据数据融合仿真平台的实际要求,本文通过用户模块对SATGE进行扩展,来控制仿真原型的工作。扩展SIM即用户模块,本文设计了传感器探测模块um-Sensors来对仿真过程的目标实体进行控制,把目标实体的航迹点方位数据保存到临时数据包中,然后实时传送到数据融合仿真平台。其中:传感器的探测数据模块默认为STAGE系统默认模型,传感器类型为雷达类型。航迹产生过程中,与数据融合仿真平台是相互独立运行,以固定的频率给数据融合仿真平台传送航迹点数据,直到整个仿真结束。
仿真结果:此处仿真结果仅仅表示航迹的产生。通过扩展STAGE与外部进程的通信功能,利用VC应用程序来实现实时接收,数据融合,及显示目标航迹的过程。所以本文对UDP/IP通信过程的航迹点数据结构设计如表1所示。
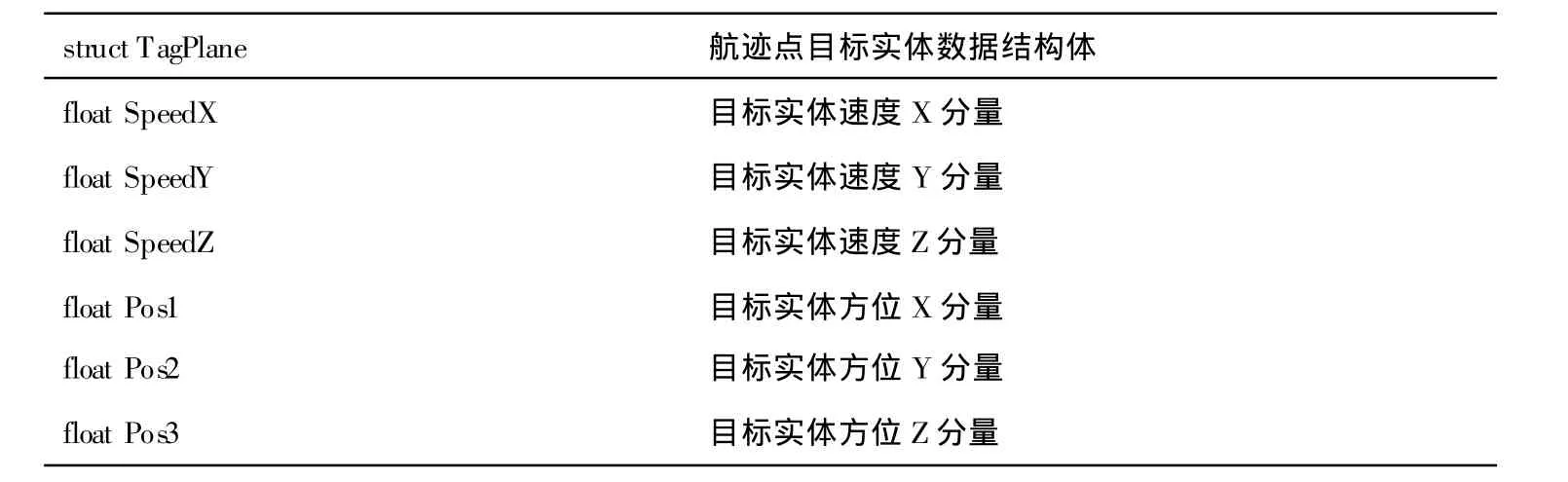
表1 航迹点数据结构
通过STAGE软件平台的仿真之后,本文得到了数据融合算法所需要的目标航迹,接着要实现数据融合仿真平台在Visual C++6.0平台上的程序设计。其设计主要分为4个部分即传感器数据产生,数据融合,界面控制及显示,数据库管理。
传感器数据产生:仿真平台接受到目标标准航迹之后,然后其处理方法是加上随机噪声。
数据融合:现已形成了系统航迹,该功能将已新近研究出来的数据融合算法,通过平台的用户接口,经过转化及修改,调入该平台进行仿真验证和性能评估。因此,在建立融合算法框架模式之后,然后在此基础上不断进行算法扩充,建立一个算法库。各个算法按一定的组织存封装在算法库中,统一调度和管理。数据融合开始之前,仿真平台先接到STAGE平台的当前时刻目标的标准航迹点,然后定义算法所需要的矩阵,接着通过调用传感器数据初始化状态向量,进入循环判断是否进入算法融合阶段,随后通过同样的调用传感器数据时刻更新传感器测量值,最后经过算法处理的状态向量保存到数据库中。用户可以在主控模块创建判断是否进行融合算法的标志属性,实现了对数据动态处理,动态显示。
界面控制及显示:主控模块的设计思想基于对数据融合仿真平台框架结构,统一调度及管理。根据主控模块程序设计流程图,如图4所示。
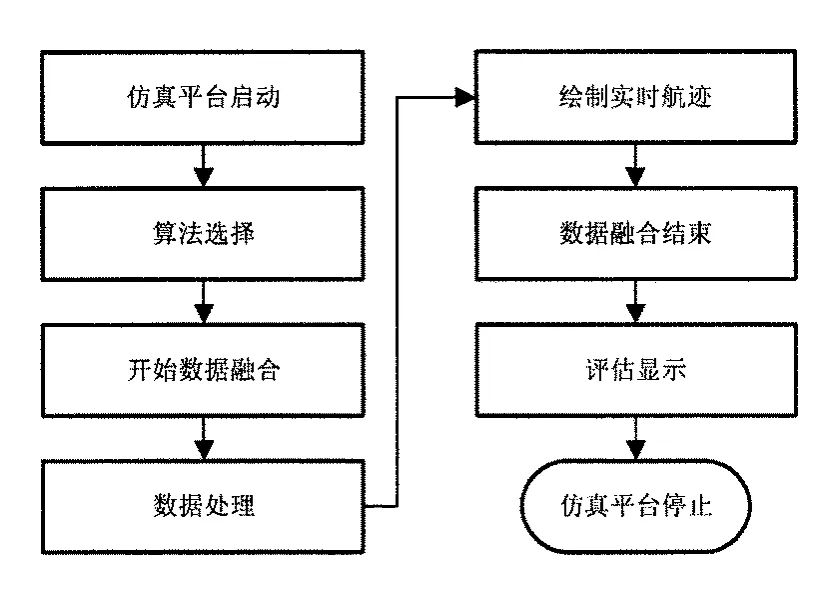
图4 主控模块程序流程图
数据库管理:动态存储整个系统仿真过程的实时数据和历史数据(包括目标航迹方位距离、算法处理后的目标估计值、航迹间的误差值等等),通过该仿真平台采用的数据库操作技术是ADO数据访问机制及Access 2003。
3 实例分析
本文所举的实例是关于IMMMHT算法的仿真。本次仿真周期150s,传感器采样周期是1s,传感器类型选择雷达类型,雷达扫描半径为100km,雷达坐标位置相对于融合中心位置(0,0)。仿真的航迹条数为2条,其航迹参数是:
目标1航迹,初始位置坐标(67 139.30,1 136.78),速度为300m/s;
目标2航迹,初始位置坐标(88 382.68,25 706.72),速度为200m/s。
当STAGE平台与数据融合仿真平台相互通信之后,仿真平台需要根据用户航迹情况选择相应的数据融合算法,然后进入数据融合阶段,将上述的两条标准目标航迹加入系统噪声,通过界面显示系统,显示实时的融合航迹如图5所示。

图5 系统融合航迹示意图
在仿真平台中,设置了数据管理系统,以便用户对融合的数据进行分析,为后续的性能评估工作做准备。Visual C++6.0面对对象环境为用户提供了友好的人机界面,易于用户操作和扩展。
4 结束语
从仿真效果来看,在该仿真平台上用户可以在STAGE平台里自定义目标飞行航迹、飞行参数、及目标数目,自定义传感器模型及性能,并且根据不同的仿真要求设置不同的融合算法,从而体现了该仿真平台的通用性和实用性,对传感器数据融合技术的发展有现实的意义。
[1]何友,王国宏.多传感信息融合及应用(第二版)[M].北京:电子工业出版社,2007:1-11.
[2]韩崇昭,朱洪艳,段战胜.多源信息融合[M].北京:清华大学出版社,2006:124-188.
[3]杨万海.多传感器数据融合及其应用[M].西安:西安电子科技大学出版社,2004:23-101.
[4]万立德,陈家庆.STAGE战术仿真软件的研究与扩展[J].电子对抗技术,2005,11(6):37-40.
[5]赵晓哲,王在刚,孙永侃.基于STAGE的舰潜对抗仿真系统设计[J].系统仿真学报,2006,18(4):832-834.
[6]张哲.STAGE软件在水下平台作战系统仿真支撑环境中的应用研究[D].西安:西北工业大学,2005.
[7]程云鹏,肖兵.一种数据融合算法评估平台[J].传感器与微系统,2006,25(4):43-45.
[8]吕艳梅,单甘霖,孙江生.多传感器数据融合仿真平台的构建与设计[J].系统仿真学报,2003,15(11):1 527-1 536.
A Design of Multi-sensor Data Fusion Simulation Platform WANG Ying-ming,PENG Dong-liang
(Institute of Information and Control,Hangzhou Dianzi University,Hangzhou Zhejiang310018,China)
This paper presents the system’s concept about the design of amulti-sensor data fusion simulation p latform,and then develops a general and scalable data fusion simulation platform through structured analysis.Its main content includes:themixed programming technology of STAGE and Visual C++6.0,drawing the trajectories of targets,the data communication of UDP/IP protocol,and the construction about fusion algorithm for the software design and so on.For example,the simulated platform is proved versatility and practicability.
multi-sensor;data fusion;software design;simulation platform
TP212
A
1001-9146(2010)04-0204-05
2010-04-10
总装备部武器预研基金项目(XXXXXXXX)
王益鸣(1984-),男,浙江温州人,在读研究生,数据融合仿真平台.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
青年歌声(2019年12期)2019-12-17
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
舰船科学技术(2015年8期)2015-02-27

- 杭州电子科技大学学报(自然科学版)的其它文章
- 基于遗传算法的人脸识别系统设计
- 粗对苯二甲酸加氢精制反应过程的流程模拟