温室智能装备系列之八 国内外温室园艺机器人的研究和应用现状
2009-05-17 05:05马伟
农业工程技术·温室园艺 2009年9期
马 伟
温室园艺产业化生产在西方发达国家的水平很高、规模很大。由于受到农业用地狭小的条件限制,荷兰、以色列、日本等国家发展温室园艺产业具有明显的特征重视种苗培育、建设现代化大型温室、大量采用智能化计算机控制、生产流程高度自动化。这种“植物工厂”的专业模式和分工方式能产生非常高的生产效率,大幅提高优质蔬菜、花卉的质量和产出率,能取得很好的经济效益。在信息化时代到来的今天,依托自动控制技术和信息技术的温室精准农业是备受关注的焦点,世界各国都在该领域开展研究,取得一系列很有特色的成果,极大地推动了温室精准农业生产技术的进步。其中,温室园艺生产机器人无疑是最具代表性的。
由于设施生产是在全封闭的设施内周年生产园艺作物的高度自动化控制的生产体系,可以最大限度地规避外界不良环境影响,具有技术密集型的特点,而温室园艺机器人能够满足这种精细管理和精准控制的需求,并且能够解决温室园艺生产的劳动密集和时令性较强的瓶颈问题,太幅提高劳动生产率,改善设施生产劳动环境,避免温室密闭环境施药施肥对人体的危害,保证作业的一致性和均一性等。王树才(2005)指出,目前全世界已经开发出了耕耘机器人、移栽机器人、施肥机器人、喷药机器人、蔬菜嫁接机器人、蔬菜水果采摘机器人、苗盘播种机器人、苗盘覆土消毒机器人等相对比较成熟的可用于设施园艺生产的农业机器人。机器人技术尤其以日本最为代表性,日本作为最早研究机器人的国家之一,由于其老龄化提前到来引发劳动力缺乏以及人力成本高等问题,从20世纪70年代开始,日本的工业机器人开始快速发展,在经过对汽车焊接、汽车喷漆等工业领域的成功应用之后,日本的农业机器人也开始不断取得进展。佟玲(1995)指出,日本在20世纪末已经在技术密集型的设施园艺领域开发了多种生产机器人,如嫁接机器人、扦插机器人和采摘机器人等。荷兰花卉生产非常发达,温室园艺产业具有高度工业化的特征,每年花卉产业可创造50亿欧元的价值。由于温室园艺产品生产摆脱了土地约束和天气影响,可以实现按工业方式进行生产和管理,其种植过程可以安排特定的生产节拍和生产周期,产后包装、销售也能够做到与工业生产如出一辙。因此,荷兰的机器人技术得到快速发展。很多温室使用机器人实现不分白昼的连续工作,极大地降低了劳动成本。周增产(2001)即介绍了荷兰农业环境工程研究所开发的黄瓜采摘机器人,它能够快速到达初步作业位置,视觉系统能够探测到黄瓜果实的精确位置及成熟度,末梢执行器可以抓取黄瓜果实并将果实从茎秆上分离。由于温室园艺产业发展的需要以及对高精尖温室园艺环境控制机器人的需求,这一领域得到快速发展。
种植机器人
标准模块化机器人的理念在设施园艺生产领域的应用能够给农业注入巨大的活力。以色列海法市一所大学的研究人员研制的种植机器人选择可用来运输的集装箱作为作物生长环境,选用营养液栽培法来种植蔬菜及其他农作物。这种方法的主要原理是以水取代土壤作为植物的苗床。每只集装箱内从播种、浇水直至收获均由机器人系统操作,箱内的温度、湿度、光线等,均由机器人细心控制,使农作物一年每一个生长时刻都得到精心的管理。经过试验,一个运输集装箱平均每天可生产的蔬菜比同样面积的普通农田的产量要高出数百倍。这种基于标准模块组装的机器人具备大规模应用的广阔前景,规模化潜力巨大。
工厂化育苗机器人
设施生产工厂化育苗精准作业育苗机器人是专门针对西甜瓜等需要专门育苗的作物播种、喷药的生产需求的。该系统能流水线式作业,自动完成大规模苗盘播种时的自动上土、精量播种、对靶喷药消毒杀菌等三个环节,一条生产流水线可实现整个环节全部自动化,封闭式作业、流水线工序,是设施生产瓜果、蔬菜、花卉等工厂化育苗的关键设备之一。该系统全部采用自动化作业,真空吸种,自动输送,不锈钢机架结构造型美观,不同的精准作业模块采用组合设计,综合集成了气、液、电、光等技术成果,采用程序全自动控制。可提高播种的精度,消除土壤病虫害,减轻劳动者劳动强度。喷药时采用封闭环境,减少喷药过程中农药对人体的危害,提高生产率,降低生产成本。该系统能实现快速流水线作业,是现代设施生产的关键设备。该设备非常适合现代农业园区使用,有很好的示范效果。
工作流程为:苗盘首先被传送带送到送土位置,完成自动装土工序,然后自动到达播种位置,由传感器检测到苗盘准确位置后,发出信号,自动精量播种机采用真空气吸技术,将种子吸附在播种器上放种。播种器可完成并排多个播种穴的同时放种,并且可以精确地自动控制每个穴中播种的数量。播种完后,到达喷药位置,系统可自行完成自动农药对靶喷洒,能有效地节省农药并精确定位杀死病菌和害虫。例如,西甜瓜基地实现播种育苗可以有效为周边农户和企业提供育苗作业,具有良好的示范展示作用,为目前国际设施生产地主要发展方向,对于推动温室自动化精准育苗流水线作业具有重要意义。
移栽机器人
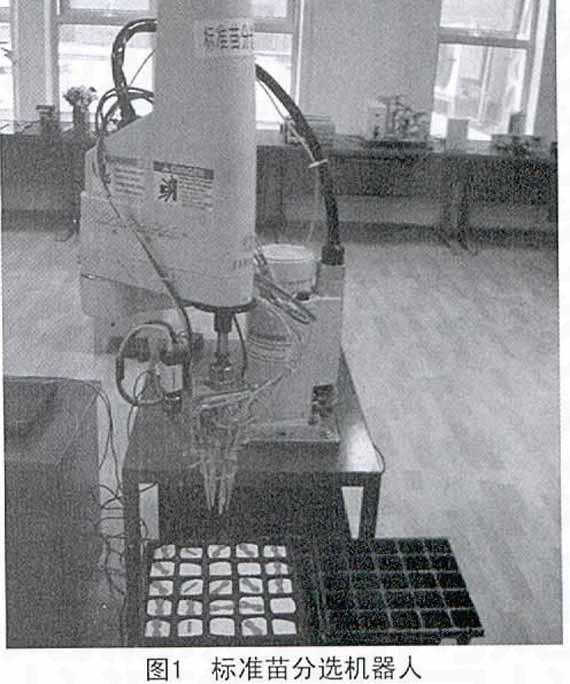
一般,移栽作业需要大量手工劳动才能完成,为了解决上述难题,开发了移栽机器人,它能够代替人工,高效率地进行移苗工作。王树才(2005)介绍了台湾K.C.Yang等研制的移栽机器人,该设备能把幼苗从600穴的育苗盘中移植到480穴的苗盘中,这种自动化的作业方式能极大地减轻工人的劳动强度。该机器人本体由四自由度工业机器人和SNS夹持器组成,在工作的过程中,依靠系统的视觉传感器和力度传感器,能够做到夹持秧苗而不会对其造成损伤。在秧苗紧挨作业时,每个苗的时间约3s。这样的工作效率是熟练工人的2倍~4倍,而且不会因为工作单一枯燥和长时间劳动而降低工作质量。因此,该设备非常合适现代温室园艺的生产过程中的移栽作业。另外,该工作过程可通过计算机控制,实现自动化的标准苗分选,保证种苗的质量,该分选可通过专门的标准苗分选机器人进行(见图1)。这种机器人作业的模式可以有效解决人为因素导致的种苗分选质量不稳定的问题。

嫁接机器人
温室生产中广泛应用的嫁接技术能有效提高产量、增加作物抗病虫害的能力,因此越来越多地得到应用。为了解决嫁接过程中劳动强度大的问题,机器人技术较早被引入这个领域。日本对嫁接机器人的研究起步较早。嫁接的对象包括黄瓜、西瓜、番茄等。这种经过嫁接的蔬菜水果更能适应温室环境并明显地提高产量和果实品质。机器人利用图像探头采集视频信息并利用计算机图像处理技术,实现嫁接苗叶的识别、判断、纠错等。然后,机器人完成砧木、接穗的取苗、切苗、接合、固定、排苗等嫁接全过程的自动化作业。全自动的机器人可以同时将砧木和接穗的苗盘通过传送带送入机器中,机器人可自动完成整个苗盘的整排嫁接作业,工作效率极高。半自动的机器人通过人工辅助,在嫁接过程中,工人把砧木和接穗放在相应的供苗台上,系统就可以自动
完成其余的劳动作业(见图2)。
农药喷洒机器人
不合理的使用农药极容易导致人员中毒,全国每年因为施药机械落后导致中毒的事件有8万人之多。由于施药技术直接关系工人的身体安全健康,并关系到对空气和地下水的危害程度,所以,国外发达国家一直在高效施药技术领域开展着大量研究工作。机器人技术是根据设施生产中杀菌和病虫害防治的要求,结合现有的高精尖科技成果,应用光机电一体化技术、自动化控制等技术在施药过程中按照实际的需要喷洒农药,做到“定量、定点”,实现喷药作业的人工智能化,做到对靶喷药,计算机智能决策,保证喷洒的药液用量最少和最大程度附着在作物叶面,减少地面残留和空气中悬浮漂移的雾滴颗粒。日本为了改善喷药工人的劳动条件开发了针对果园的喷药机器人,机器人利用感应电缆导航,实现无人驾驶,利用速度传感器和方向传感器判断转弯或直行,实现转弯时不喷药。美国开发的一款温室黄瓜喷药机器人利用双管状轨道行走,通过计算机图像处理判断作物位置实现对靶喷药。周恩浩(2008)对温室喷药机器人的导航问题提出了一套视觉方案,并对此进行了理论探讨,导航和定位涉及到人工智能的运算算法,是一个比较复杂的问题。温室喷药机器人“Ehu”采用轮式方式行走,可利用辅助标志自动识别道路,喷药机器人采用循迹方式自走作业,采用超声波技术和光电技术定位作物,可以实现姿态的灵活调整,非常适合在温室的光线下进行图像识别(见图3)。姿态校正速度明显高于摄像头导航的机器人,基本不会偏离作业路径,可实现持续喷雾作业。
采摘机器人
目前国内外研究和投入应用的采摘机器人作业对象基本集中在黄瓜、番茄等蔬菜,西瓜、甜瓜等瓜类,以及温室内种植的蘑菇等劳动密集的作物。以色列Y88l Ed8n(1 995)介绍了用于水果采摘的准确率可达85%的可自行定位和收获的机器人。英国西尔索研究所研制了蘑菇采摘机器人,它可自动测量蘑菇的位置、大小,并且根据设定值选择成熟的蘑菇进行采摘,机械手由两个气动关节和一个旋转关节组成,采用顶置摄像头来确定位置和大小,采蘑菇速度为6个/s~7个/s。日本N Condo等人研制的黄瓜采摘机器人为六自由度,利用黄瓜和茎叶的反射率差异来区分黄瓜,采摘速度约为4个/min。日本Kyoto大学研制的西瓜采摘机器人为五个自由度,配有视觉摄像头和行走装置。活动空间大。美国研制的甜瓜采摘机器人使用三个伺服电机驱动机械手,实现三自由度运动。韩国Kyungpook大学研制的苹果采摘机器人具有最高达3m的机械手,可进行四自由度运动,末端执行器采用三指夹持的方式,辅助压力传感器避免损伤苹果,识别率达到85%,采摘速度为7个/s。应用于温室蔬菜和水果生产的机器人采用视觉识别模式来确定果实的位置并调整机械手的位置,由于光线和叶面的遮挡,准确率受到很大影响,因此,相关的算法还需要不断优化,以满足设施生产的环境要求和生产准确度。
鲜花机器人
利用仿形技术开发的机器人除了具备完美的外观之外,其智能控制技术的集成应用可以代替人来控制室内环境,并且能够实现环境的精确控制。韩国国立全南大学研制的鲜花机器人外形模仿普通开花植物,机器人高度为130cm,最大直径40cm,而且能够自动分析室内空气的质量根据程序设定对空气进行加湿处理、释放氧气,还能释放空气清新剂的香味。该机器人充分的仿生功能使其还能够生长和开花。该鲜花机器人可以将花朵朝向说话的人的方向,也可以根据音乐的节奏开合花瓣。
休闲和科普功能也是设施农业的一个重要组成方面,仿形机器人的外形具有很好的亲和力,因此,在设施农业发展过程中将会扮演重要的角色。
温室园艺生产依托的高效率、高投入、高产出的管理模式要求应用大量的高新技术,机器人技术在该领域的应用是国内外研究和应用的热点。真正意义上的机器人、半自动农业机械在界限上没有严格的区分,但是完全代替人或者大部分代替人从事繁重体力劳动,通过自动识别农作物和自动调整姿态实现无人操作的智能农业机械都可以归入农业机器人的范畴。温室园艺生产的高投入高产出的特点决定农业机器人技术的发展前沿将集中在该领域。因此,在温室园艺环境下,在生产和应用思想指导下,通过大量实际环境测试和研究的图像识别算法、姿态控制算法、机械末端执行器,将是温室园艺机器人发展的重点。由于农田环境的多变性和对象复杂性,生产对象不如工业品那样单一和标准,因此农业机器人相比工业机器人面临更多的技术障碍。温室园艺的生产环境相比大田环境在光线、风速、温度等气象条件方面相对较稳定,而且产品附加值较高,反季节也可生产,因此未来的机器人技术在温室园艺生产上的应用有广阔的发展空间。
猜你喜欢
学校教育研究(2021年21期)2021-05-24
小天使·四年级语数英综合(2021年12期)2021-03-19
农民致富之友(2019年28期)2019-10-21
小太阳画报(2019年4期)2019-06-11
东坡赤壁诗词(2018年6期)2018-12-22
少儿科学周刊·儿童版(2015年12期)2016-05-16
山西果树(2014年4期)2014-09-22
农业工程技术·温室园艺(2009年4期)2009-07-24
农业工程技术·温室园艺(2009年4期)2009-07-24
农业工程技术·温室园艺(2009年11期)2009-05-17