
基于PID参数模糊自整定的船用锅炉水位控制器设计与仿真研究
2008-04-24 03:21倪吉远,宋玉官,郭庆祝
中国舰船研究 2008年2期
1 引 言
传统的PID控制器大量应用于工业过程控制中,取得了良好的控制效果。但常规PID控制系统一般只适用于线性系统,且不能根据实际情况在线调整增益系数Kp,Ki,Kd,使其不能满足在不同的偏差e(k)和偏差变化率ec(k)下对控制器的PID参数进行自整定的要求,从而影响系统的控制精度和系统的稳定性[1]。锅炉汽包水位作为控制系统的被控对象时是一个非线性、时变的环节,在汽包水位控制器的设计中,仅采用常规的PID控制很难在整个控制范围内获得良好的控制效果。本文针对常规PID控制的这个缺点,结合模糊控制技术,提出一种PID参数模糊自整定的方法。
2 PID参数模糊自整定控制系统的基本原理
2.1 PID参数模糊自整定控制系统的结构
该控制器是由一个标准的PID控制器和一个Fuzzy自调整机构组成。根据输入信号偏差e的大小、方向及变化趋势等特征,通过Fuzzy推理作出相应决策,在线调整P、I、D参数修正值以适应控制系统的参数变化和工作条件的变化。基于模糊逻辑推理的PID控制器以控制专家整定控制器参数的经验和知识为基础,在PID算法的基础上增加了E和EC的计算,并将在工艺分析和操作经验基础上总结的专家知识,以产生式语句IF(条件)THEN(结果)的形式组成知识库,经模糊合成推理形成模糊查询矩阵。根据模式状态变量E和EC,通过实时调整机构在知识库中搜索相应的模糊推理矩阵,并进行参数调整(图1)。

图1 PID参数模糊自整定控制系统结构图
2.2 PID参数模糊自整定的原则
模糊自整定PID参数的目的是使参数Kp、Ki、Kd随着e和ec的变化而自行调整,故应首先建立它们之间的关系。根据实际经验,参数Kp、Ki、Kd在不同的e和ec下自调整要满足如下调整原则[2]:
1) 当e较大时,为加快系统的响应速度,防止因开始时e的瞬间变大可能会引起的微分溢出,应取较大的Kp和较小的Kd,;同时由于积分作用太强会使系统超调加大,因而要对积分作用加以限制,通常取较小的Ki值;
2) 当e中等大小时,为减小系统的超调量,保证一定的响应速度,Kp应适当减小;同时Kd和Ki的取值大小要适中;
3) 当e较小时,为减小稳态误差,Kp与Ki应取得大一些,为了避免输出响应在设定值附近振荡,同时考虑系统的抗干扰性能,Kd的取值要适当。
3 模糊自整定PID参数控制器的设计
3.1 模糊语言变量及其隶属函数的确定[3]
由参数自整定Fuzzy-PID控制器图可知,其中的参数校正部分实质为一个Fuzzy控制器,其输入语言变量为E、EC,输出语言变量分别为Kp、Ki和Kd。对于系统响应的误差E、误差变化率EC分别具有一定的变化范围,将其变化范围分别定义为Fuzzy集上的论域。E、EC={-3,-2,-1,0,1,2,3};模糊控制器输出语言变量Kp、Ki、Kd={-3,-2,-1,0,1,2,3}。设其Fuzzy子集为:E、EC={NB,NM,NS,0,PS,PM,PB};Kp、Ki、Kd={NB,NM,NS,0,PS,PM,PB}。他们的隶属度函数为三角形函数,如图2所示。

图2 E、EC、Kp、Kl、Kd的隶属函数
3.2 控制规则集的建立
模糊自整定PID参数控制器目的是要根据E和EC的变化而自动调整PID参数,因而必须找到Kp、Ki、Kd与E和EC之间的对应关系。根据上述参数的整定原则以及专家的经验,可得到一系列规则(Kd调整Fuzzy规则集模型从略),如表1、表2所示。
3.3 基于模糊规则表的模糊推理
由Fuzzy-PID控制器的结构可知,它属于二维输入三维输出的Fuzzy控制系统, 输入分别为E和EC,而输出分别为PID的3个调节参数Kp、Ki和Kd,在获得了三者的调整规则模型后,根据模糊理论进行算法合成,求得相应的Kp、Ki、Kd的3个控制表,因为3个控制表的求解过程完全一样,故仅将Kp控制表的求取过程说明如下。

表1 Kp调整Fuzzy规则集模型
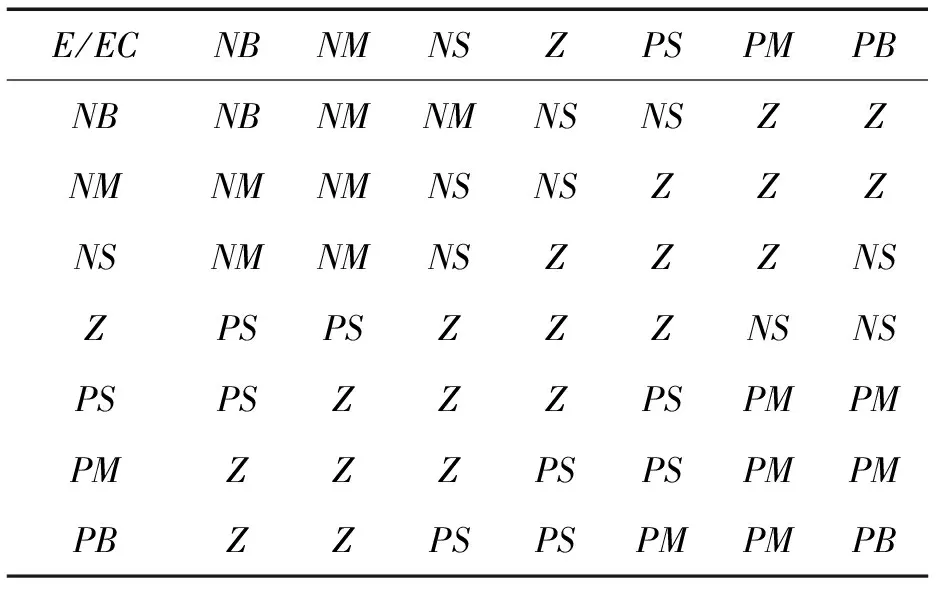
表2 Ki调整Fuzzy规则集模型
对于二维输出(E、EC)单输出(Kp)的Fuzzy控制系统,其控制规则一般可写成如下语言推理形式。
IfE=EiandEC=ECjthenKp=Kpij
i=1,2,…,m;j=1,2,…,n
(1)
其中,Ei、ECj、Kpij分别是定义在E、EC、Kp上的Fuzzy集,式(1)一般可用一个Ei×ECj到Kpij的Fuzzy关系R来描述,即
R=Uij(Ei×ECj)×Kpij
(2)
根据Fuzzy数学理论,“×”运算的含义由下式定义。
(e,ec,Kp)=∨[(e)∧ (ec)∧ (Kp)]
(3)
如果偏差和偏差变化率分别取E和EC,则Fuzzy控制器给出的控制量的变化由Fuzzy推理合成规则算出:
Kp=(E×EC)R
(4)
即
(Kp)=∨((e,ec,Kp)∧(e)∧ (ec))
(5)
因此,根据所得Kp的模糊规则可按式(2)、式(3)把相应的Fuzzy关系R求出来,反之若系统的Fuzzy关系R为己知时,可根据输入E和EC利用式(4)、式(5)求出Kp的调整表。Kp参数调整算式为:
(6)

4 在锅炉汽包水位控制仿真研究中的应用
4.1 仿真模型的建立和算法实现
将锅炉汽包水位系统作为被控对象,其数学模型为:
(7)
运用模糊PID参数自整定控制方法,将模糊逻辑工具箱与MATLAB函数相结合,在MATLAB中Simulink环境下进行仿真研究。其中,模糊推理方法采用Mamdani型推理,去模糊化采用平均最大隶属度(mom)方法。
4.2 仿真结果分析
图3给出了常规PID控制与模糊PID控制控制锅炉汽包水位的试验仿真曲线比较。图4是改变被控对象模型时的仿真曲线。

图3 常规PID与Fuzzy-PID的比较

图4 被控对象参数发生变化30%时的仿真比较
可以看出:
1) 模糊PID参数自整定控制具有较小的超调量和较短的调节时间,具有较好的动态响应和稳态特性,它优于常规PID控制;
2) 由于模糊PID参数自整定规则能根据工况变化过程中的偏差和偏差变化率自动进行PID参数调整,因而具有较好的自适应能力;
3) 有较好的抗干扰能力,当工况发生变化时,与传统POID算法相比,模糊PID参数自整定控制有更好的鲁棒性。
显然,模糊PID参数自调整的新型控制器是一种设计简单、实现方便、控制规则优化,以及性能优良的智能控制器,具有动态性能好,稳态精度高,抗干扰性能好和鲁棒性较强等特点,适用于非线性、时变、强干扰的不确定复杂系统。
[1] 王立新.自适应模糊系统与控制[M].北京:国防工业出版社,1995.
[2] 刘明兰,孙立红,等.基于自调整因子FUZZY规则的专家控制器[J].武汉:武汉汽车工业大学学报,1997(6):65-68.
[3] 张国良,曾静,等.模糊控制理论及其MATLAB应用[M].西安:西安交通大学出版社,2002.
猜你喜欢
商界评论(2022年1期)2022-04-13
机械管理开发(2022年1期)2022-03-24
发电设备(2020年5期)2020-10-09
学生天地(2020年6期)2020-08-25
山东工业技术(2016年15期)2016-12-01
中国新技术新产品(2014年6期)2014-03-25
中国新技术新产品(2011年23期)2011-12-31
空间控制技术与应用(2010年3期)2010-12-23
中学生数理化·七年级数学人教版(2008年10期)2008-01-21
