
做个遥控模型车专家(一)
2008-04-01 02:40蔡启予
中学科技 2008年3期
蔡启予
本文主要介绍遥控模型油动车的初步驾驶技巧。
基本技术
想要快,有两种方法:可以走一个比较短的距离,或者在同样的距离间以更高的速度行驶;也可以将两者结合起来。这意味着车子行走的路线应该尽可能的短,同时没有尖锐的弯角。

图1显示了在一个简单的180度弯中的理想路线。这种类型的行驶路线称为“外-内-外”:在接近弯角的时候,车子尽可能走在赛道的外线;在弯中间走内线;然后走外线出弯。车子行进路线的半径越大,车子在弯中损失的速度越少。
另需注意的是,应在入弯之前的直线车道上完成刹车动作,加速也应该在出弯之后在直线车道才开始。在圆形的车道,车速应保持平均。
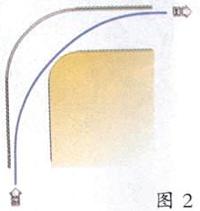
在其他任何类型的弯角也可以用同样的道理:半径最大的路线,车子是最快的!图2所示的是一个90度弯。刹车、转向,保持恒定的转弯半径,不加速也不减速。应在外线开始和结束转弯,以及几乎在弯中间切入弯心(在该路线最接近弯道内侧的点,亦称“切入点”)。
最重要的不是找出哪条是最理想的路线,而是保持车子的连贯性和稳定性——在10个弯角走出完美的圆形路线可以赢得的时间,也不如在一个弯角中处理失败而损失得多。
进阶技巧
前面的例子里只是考虑了一个弯的情况,而且在弯前和弯后都是一段短直路。但是,如果在弯后面有另一个更紧凑的弯角,或者有一段很长的直路,那么“外-内-外”的路线就未必是最快的路线。比如:出弯过度向外抛,你就可能错过了下一个弯的入口,因为你仍然在路面上的错误的一侧!在这种情况下“慢入快出”的路线或许是最快的。
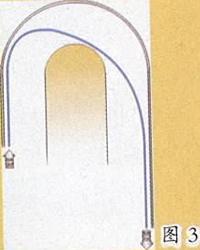
“慢入快出”类型的路线基于这样一个事实:车子制动比加速更强烈。就如图3所画的那样,刹车更迟、更狠一点,并且更迅速地拐入弯中。你将以高得多的出弯速度进入直路。对于弯角后紧接着长的直路的情况,这会赢得可观的时间。
但用这种过弯方式有两个缺点:第一,如果你出弯时走得太靠外了一点,而你需要再转向少许以避免撞到赛道外侧,你就会失去已经获得的额外的速度,甚至更慢。第二,因为你刹车迟了,在刹车时就更靠近赛道外侧,这样就留出了足够的空位,使得跟在后面想要超车的其他车辆有机可乘。
因此,寻找在一系列弯中最快的线路并不简单,需要你不断琢磨和实践,根据不同情况应势而变。
猜你喜欢
思维与智慧·上半月(2023年6期)2023-05-19
思维与智慧(2023年16期)2023-05-19
现代交通与冶金材料(2022年4期)2022-08-04
今日农业(2021年8期)2021-11-28
诗潮(2020年10期)2020-12-06
小哥白尼(野生动物)(2019年5期)2019-08-27
科教导刊·电子版(2017年34期)2018-01-31
科技与创新(2017年1期)2017-02-16
当代体育科技(2015年5期)2015-02-25
军事历史(1982年3期)1982-08-21
