用SPCE061S实现的简易智能电动车
2003-04-29 00:44:03羚阳
电子世界 2003年12期
羚 阳
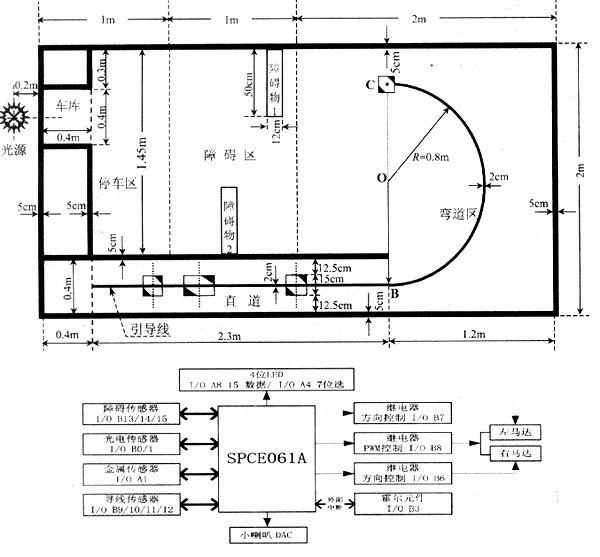
设计并制作一个简易智能电动车,设计功能及要求见本刊第10期,其行驶路线示意图如图1。
1.方案设计与论证
采用凌阳公司16位单片机SPCE061A做核心控制。3个I/O口控制双刀双掷继电器从而控制电机的正向和反向转动;2个黑白线传感器,用来控制小车寻线行走;3个光电传感器控制小车寻找光源,进入车库;1个金属传感器用来检测金属铁片;4位LED动态显示检测到的金属铁片,并在到达终点以后显示总的路程和时间;4个障碍传感器,用来躲避障碍区的障碍物;1个霍尔元件用来记录小车的行进距离和时间;小车采用双电机,4轮驱动;电源为12节5号电池,分别为CPU、传感器和电机提供电源。
2.系统硬件电路设计
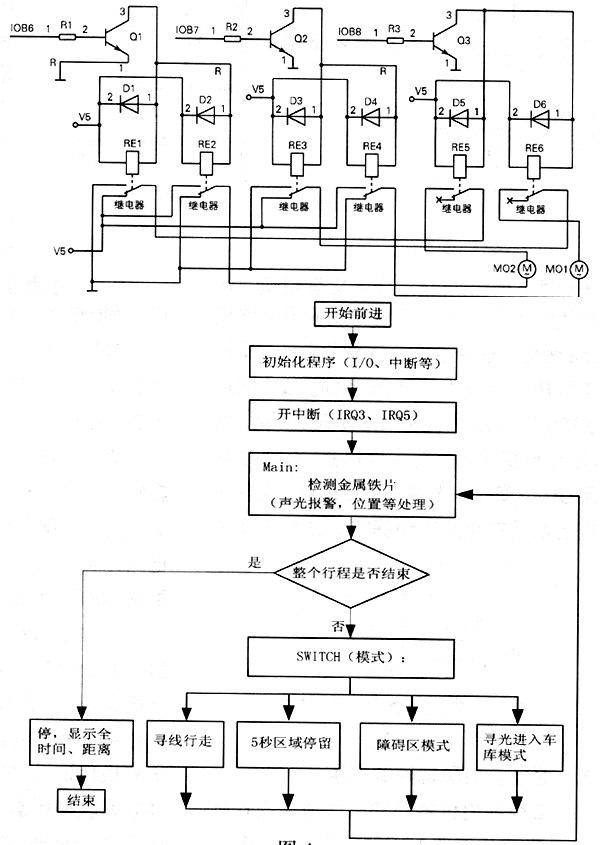
图2为其电路方框图,图3为电机驱动电路。图3中用SPCE061A的PWM功能,配合3个双刀双掷的继电器,控制2个电机的转动方向以及转动速度。
3.软件设计
图4为主程序流程图,速度控制流程图、中断服务程序流程图及源程序见本刊网站。
4.总结
由于SPCE061A的时钟最高可达49MHz,32个I/O口,而且具有一定的语音处理功能,这些都为我们实现电路提供了非常便利的条件:
(1)量程的切换,一般情况我们会采用模拟开关或继电器来控制,我们在这里只需要几个I/O口即可实现该功能,不需要外加任何电路,控制简单、节省成本;
(2)SPCE061A有丰富的时基中断,我们可以采用2Hz实现定时一二秒,程序简单而且精度高;
(3)SPCE061A定时器可以采用外部时钟源计数,为我们计算振荡电路产生频率提供了便利,而且计算精度较高,控制简单;
(4)SPCE061A具有语音处理功能,可以非常轻松地加入语音播报功能,使整个设计更具智能;
(5)SPCE061A具有“看门狗”功能,避免出现“死机”现象。
该设计还有很多不足之处,这里只是为大家提供一种思路,您可以根据自己的需求加以完善:如采用标准的电阻、电容和电感进行校准,可提高测量精度等。
猜你喜欢
数学小灵通(1-2年级)(2023年1期)2023-02-10 06:01:00
小猕猴学习画刊·下半月(2021年9期)2021-10-10 12:13:15
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
农家致富顾问·上半月(2019年4期)2019-09-10 07:22:44
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
河南科技(2016年8期)2016-09-03 08:08:22
河南科技(2016年6期)2016-08-13 08:18:29
浙江共产党员(2014年12期)2014-07-10 03:30:06