
翼尖铰接组合式无人机气动建模方法及布局参数影响
2024-05-07 07:59安朝霍贵玺孟杨谢长川杨超
航空学报 2024年6期
安朝,霍贵玺,孟杨,谢长川,杨超
北京航空航天大学 航空科学与工程学院,北京 100191
无人机(Unmanned Aerial Vehicle,UAV)起源于工业时代,随着航空需求的多样化发展,无人机技术不断进步,逐步成为航空器的重要分支。相比有人机,无人机具有成本低、人员零伤亡、持续作战能力强等优势,在军事侦察、快速打击、物资运输及通讯中继等方面发挥重要作用,受到各国人员的广泛关注[1-2]。近年来,轻质材料结构、计算机及控制技术的飞速发展为无人机在民用及军事中的广泛应用创造了条件。高空长航时无人机(High-Altitude Long-Endurance,HALE)、无人机集群是颇具潜力的主要发展方向。高空长航时无人机以临近空间太阳能无人机为代表,飞行高度高、续航能力强、任务范围大、生存能力强,但灵活性较差,搭载的任务载荷类型单一。特别是高空长航时无人机存在几何非线性气动弹性问题[3-5],颤振速度低,分析难度高。无人机集群载荷种类多,智能化程度高,分布式任务能力强,能够完成大量单机系统无法完成或者由群体更有效完成的任务。近年来无人机集群技术不断进步,正在向去中心化、多任务、低成本方向发展,但由于体积受限和机动灵活的控制需要,无人机集群存在航时短、巡航高度低的不足。考虑到任务需求及复合平台化发展的方向,融合高空长航时无人机及无人机集群的优势是新概念无人机可预见的发展方向之一。
多体组合式无人机(Multi-body Combined Aircraft,MCA)是一类由多个单体固定翼无人机在翼尖或其他位置组合形成的新概念飞行器,组合形式包括但不限于平行翼尖并联组合、平面式网状组合等,连接形式包括但不限于刚性连接、铰接或柔性连接等。多体组合式无人机概念中,以翼尖位置处铰接形成的多体组合式无人机兼具高空长航时无人机和固定翼无人机集群的优势,具有极大发展潜力。
组合式无人机概念最早出现于1931 年,美国海军基于F9C-2“猎鹰”式战斗侦察机,利用机翼挂钩与飞艇组合成可分离回收组合体。20 世纪40 年代,美国空军尝试依托固定翼飞机机翼翼尖附加存放燃油的飞行模块来增加飞机航程。随后直至1956 年,美国空军多次开展运输机与小型靶机、战斗机的空中对接、组合飞行试验,对接形式为翼尖固接。试验中发现组合飞行后飞行器产生复杂的“拍打运动”导致难以完成飞行控制。在发生2 次飞行事故后,研究中止[6-8]。
21 世纪后,组合飞行概念再次被各国研究人员关注,其应用目标由翼尖拖带扩展段转变至同构飞行器组合提高航程航时与多任务处理能力。2002 年,Magill 和Durham[9]在风洞试验中采集数据,对翼尖对接飞行、近距离编队飞行和携带飞行等飞行模式进行了研究。2014—2016 年,Montalvo 等[10-12]对翼尖相连及首尾相连的飞行器进行分析研究,提出“元飞行器”概念,基于升力线方法仿真发现飞机连接时,飞行动力学特性如短周期模态、荷兰滚模态等随连接的数量和连接方式变化而变化。Köthe 和Luckner[13]基于Kane 方法及片条理论进行了翼尖铰接组合式无人机动力学建模与稳定性分析,发现铰接连接时飞行系统先天带有不稳定飞行模态。2017—2020 年,Köthe 等[14]和Cracau[15]基于零极点配置法设计飞行控制系统并结合常规平直翼构型无人机进行了飞行试验验证。Cooper和Rothhaar[16]基于翼尖涡模型及通用非线性气动模型给出了多架无人机空中组合对接过程的动力学模型及控制方案。安朝等[17]基于片条理论及Newton-Euler 方程建立多机组合的飞行力学模型,指出了该类组合式飞行器存在相对滚转不稳定飞行模态并设计飞行控制律。杨延平等[18]在综述文章中介绍了集群组合式柔性无人机概念,从总体、气动、结构等6 个方面梳理和分析了此类飞行器亟待解决的关键技术,具体包括合作博弈的组合体无人机总体设计、柔性多机组合非定常数值仿真及对接技术、多智能体的协同集群运动控制技术等。武建明等[19]探究了翼尖连接对于太阳能飞机降低能耗和增加飞机续航能力的影响,并导出了翼尖连接飞机的Osward 因子、诱导阻力系数及功率消耗模型。马培洋等[20]首先基于升力线理论分析了链式组合式飞行器气动特性,梳理了其在气动性能、续航能力、巡航高度和巡航速度上的优势,进行了初步飞行试验验证。周洲等[21]采用计算流体力学方法建立气动数据库,基于拟坐标形式的Lagrange 方程建立动力学模型并分析了飞行力学稳定性问题。
多体组合式无人机在动力学特性分析、飞行控制系统设计、结构形式及应用方式等与以往无人机系统设计有明显不同。当前多体组合式无人机设计研究侧重于动力学特性建模与初步试验,鲜有气动布局参数影响研究。此类新概念飞行器在飞行动力学特性特别是稳定性方面与传统飞行器有显著区别,气动布局设计过程中要考虑其飞行动力学特殊性。本文针对翼尖铰接多体组合式无人机构型,基于状态空间涡格法提出一种考虑多机气动耦合效应的气动导数计算方法,结合飞行动力学模型开展布局参数影响研究,重点关注布局参数对飞行力学稳定性影响,进行不同气动布局参数下的气动特性与飞行力学稳定性对比分析。翼尖铰接多体组合式无人机概念如图1 所示。

图1 翼尖铰接多体组合式无人机概念Fig.1 Concept of MCA with hinge joint wing-tip
1 气动建模方法
1.1 状态空间涡格法
基于状态空间涡格法[22-24]建立考虑气动耦合效应的多体组合式无人机气动特性分析与气动导数计算方法,重点关注多体组合式无人机组合状态下,某单体无人机运动参数的变化对组合式无人机整体及其他单体无人机气动特性的影响。基于势流理论的非定常涡格法在飞行器气动特性分析及气动弹性计算领域得到了广泛的应用。非定常涡格法相较于片条理论、计算流体力学方法及气动数据库方法,兼顾计算精度与求解效率优势。
定义气动求解坐标系如下:x轴沿来流方向,y轴水平向右,z轴由右手定则确定。将气动面如机翼中弧面等沿弦向和展向划分为若干四边形气动网格,中弧面形状可以考虑机翼弯度及预扭转等因素影响。在每个中弧面气动网格的1/4 弦线处布置涡线段,四段等强度涡线首尾相连构成一个涡环,所有中弧面气动网格上的涡环构成物面涡。在机翼中弧面后方布置涡线段构成尾涡。选取中弧面气动网格3/4 弦线中点为控制点,物面涡及尾涡产生的诱导速度在控制点处须满足Neumann 边界条件。物面涡及尾涡分布示意如图2 所示[24]。
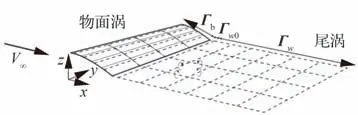
图2 涡分布示意图[24]Fig.2 Illustration of vortex distribution[24]
设物面涡个数为M,强度列向量Γb维数为M×1,气动面展向网格数为Ns,弦向网格数为Nc,最靠近气动面后缘的一排尾涡强度列向量Γw0维数为Ns×1,其他尾涡网格数为Nwl,其他尾涡强度列向量Γwl维数为Nwl×1。设气动面控制点处法向下洗速度为M×1 维列向量w,结合Biot-Savart 定律,控制点处Neumann 边界条件可写为
式中:w中各分量wi=为来流速度列向量,n0i为第i个气动网格中控制点处法向量;Kb、Kw0、Kwl分别为附着涡、第1 排尾涡及其他尾涡的诱导系数矩阵。
根据后缘Kutta 条件,后缘点环量为0,脱尾涡的过程保持涡强守恒,最后一排物面涡涡强与第1 排尾涡涡强相等[25]:
式中:C1为含0 和1 的常数提取矩阵;Δt为间隔时间。由式(2)可得:
根据Kelvin 定理进一步规定尾涡脱出后保持涡强不变:
式中:C2、C3同样为表征涡对应关系的常数提取矩阵,只包含0 和1。
综合方程(1)、(3)、(4)可得涡格法状态空间方程形式为
式中:尾涡强度列向量Γw=[Γw0Γwl]T;Aa、Ba为状态空间系数矩阵,矩阵内元素值仅与气动面几何形状及涡的划分有关:
根据Kutta-Joukowski 定理可推导得到气动力输出方程,将气动力分为定常部分Fst及非定常部分Funst。气动力定常部分Fst作用于涡环中点,可表示为
式中:eΓ为前缘切向涡方向矢量;Γ为涡量数值;ρ为来流空气密度。气动力非定常部分Funst可表示为
式中:fa为气动力列向量;Ca、Da为输出方程系数矩阵。
综上,方程(5)、(10)构成状态空间涡格法状态空间模型,状态变量为尾涡强度列向量Γw,输入变量为气动网格控制点处法洗速度w及其导数列向量,输出变量为fa。
1.2 气动导数计算方法
导数气动力模型在飞行动力学中应用广泛,其表达简洁便于动力学仿真及控制系统设计。传统的飞行动力学导数气动力模型往往基于试验数据获得,成本较高,涡格法计算精度满足要求同时计算效率高,在获得涡格法状态空间形式后,气动力具有解析表达式,直接推导气动导数表达的解析形式成为求解气动导数的新思路。同时,多体组合式无人机存在多机之间的气动耦合,组合后任一单体无人机气动导数受到其他组合无人机状态变量的影响,解析形式的气动导数求解方法在考虑多机气动耦合特性方面更加便利。
考虑涡格法状态空间形式中的定常部分,控制方程可表达为
对于刚体飞机,气动网格控制点处法向量n0i在机体坐标系中的投影保持不变。飞行器某点运动速度v可表示为[22]
式中:V0为飞行速度矢量;ω为飞行角速度矢量;r0为控制点至质心矢径。对于第i个气动网格控制点,法洗速度为
投影到体轴系上的刚体气动力列向量fAr为
式中:G为投影矩阵。全机气动载荷的合外力列向量FAr与合外力矩列向量MAr可通过结点气动载荷求和得到:
式中:求和矩阵Φt、Φr具有如下形式:
其中:xi、yi、zi为第i个气动网格控制点在体轴系中的坐标。在涡格法刚体气动力表达式(14)中,系数矩阵Aa、Ba、Ca、Da仅与气动面几何形状及涡的划分有关,而与飞机运动速度相关的变量及配平变量等都包含在法洗速度表达式(13)中。将刚体运动角速度列向量ω=[p q r]T及速度列向量V0=[-V0-V0β-V0α]T代入式(14)中,可求得刚体气动力FAr和气动力矩MAr对配平变量的各项导数如下:
其中:α、β、p、q、r分别为飞行器攻角、侧滑角、滚转角速度、俯仰角速度、偏航角速度;cp、cq、cr为列向量,各分量形式为
当n个单体无人机进行组合后,令整体气动面区域为Ω,各子无人机对应气动面区域分别为Ωk,k=1,2,…,n,设求和矩阵Φtk、Φrk为
式中:I3×3及所在位置对应Ωi在整体气动面模型Ω中的位置。无人机组合状态下第k个无人机气动力FArk和气动力矩MArk对第j个无人机配平变量的各项导数如下:
式中:k,j=1,2,…,n。
2 飞行动力学建模
多体组合式无人机飞行力学特性与传统无人机飞行器存在显著差异,其气动布局设计应考虑飞行力学特性影响。本文基于Newton-Euler方程建立动力学模型[26],组合式无人机中第k个无人机相对惯性坐标系的位置由坐标rk=(xk,yk,zk)及欧拉角φk=(φk,θk,ψk)表示,其刚体运动学方程为
式中:上标(k)表示机体坐标系下变量;mk及为单体无人机质量及惯量矩阵;为单体无人机所受外力及外力矩;=(pk,qk,rk)为无人机角速度向量;LEB为体轴系至惯性系转换矩阵;S(·)为外积算子。结合飞行力学理论,单体无人机动力学模型为
考虑n个单体无人机进行翼尖铰接组合,仅允许相邻单体无人机沿机翼翼尖弦向方向自由转动,即允许单体无人机间的相对滚转,约束关系不考虑摩擦、阻尼及刚度。约束关系可表达为
式中:u=。引入Lagrange 乘子λ表达约束关系,多体组合式无人机飞行动力学方程为
式中:含下标矩阵表示对应的Jacobi 矩阵;t为时间;Ξ=diag(Ξ1,Ξ2,…,Ξn);β=diag(β1,β2,…,βn)。气动力模型选择气动导数模型,在规定好未知配平变量及配平自由度后,直接求解该非线性方程组即可给出配平状态解。
将无人机组合系统动力学方程(37)记做:
引入变量z=[uT,σT]T,=λ,对方程(39)进行小扰动线化处理,线化小扰动方程可表示为
式中:、、分别为方 程ξ关于引入变量z的Jacobi 矩阵。小扰动方程(40)的状态空间形式可记做:
系统矩阵体现了多体组合式无人机系统的稳定性特征,系统矩阵特征值在复平面左侧则意味着飞行动力学系统保持稳定,反之则不能保持稳定,通过求解系统矩阵特征值可完成对无人机系统的飞行力学稳定性分析。
3 多体组合式无人机分析
3.1 单体无人机模型
多体组合式无人机算例由多个相同的单体常规布局固定翼无人机铰接组成,单体无人机模型设计图如图3 所示,设计参数如表1 所示。其机身设计参考美国密歇根大学的X-HALE 无人机[27]。为了体现大展弦比机翼设计的同时尽量减小翼尖变形效应的影响,该无人机模型采用双机身结构,全机设计质量8 kg,展弦比约为11.1,共分为3 段,其中左机翼、右机翼及中部机翼展长相等均为1.0 m,机翼至尾翼距离(前缘)为1.02 m。由于设计飞行速度较低,无人机采用矩形平直翼构型,其中左、右两侧机翼后缘布置副翼,左副翼及右副翼分别贯穿左机翼及右机翼,控制面弦长占机翼弦长的1/3。机身与尾翼之间通过由机身延伸的尾撑杆连接。
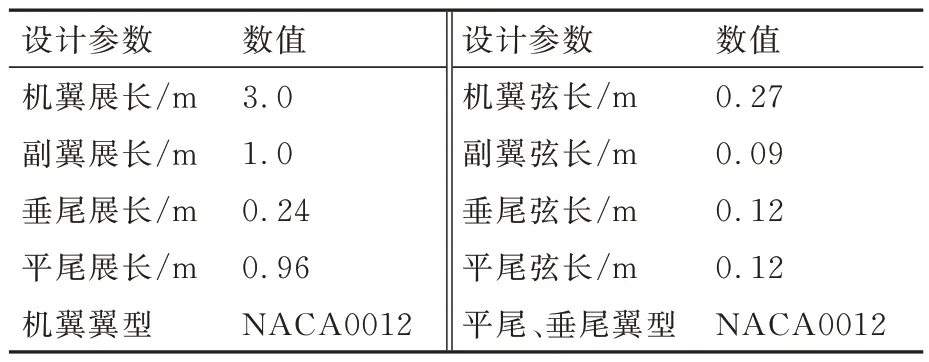
表1 单体无人机设计参数Table 1 Design parameters of single UAV
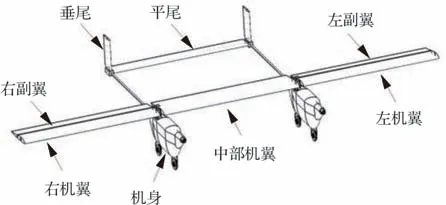
图3 单体无人机模型Fig.3 Model of single UAV
3.2 气动导数计算及验证
通过对单体无人机气动导数的计算验证状态空间涡格法气动力模型的正确性。气动网格沿机翼气动面展向划分90 个网格,弦向划分8 个网格,共720 个气动网格单元;沿尾翼气动面展向划分46 个网格,弦向划分8 个网格,共368 个气动网格单元,全机共计1 088 个物面涡气动单元,划分如图4 所示。本文在计算气动导数时不考虑机身影响。尾涡弦向划分网格数量给定为20 倍物面涡弦向网格数量,即沿来流方向划分160 个网格,共21 760 个气动网格单元。计算工况设定飞行速度20 m/s,迎角1°,大气密度1.225 kg/m3。取矩中心指定为距离机翼前缘0.067 5 m(机翼弦长的1/4 处)。基于状态空间涡格法计算得到的气动压强分布结果如图5 所示,图中ΔCp表示气动压强数值。图6 给出了机翼展向升力分布情况,图7 给出了尾翼展向升力分布情况。可见机翼及尾翼升力分布大致满足椭圆分布,符合大展弦比机翼的升力分布规律。由于存在尾翼物面涡及尾涡的诱导,机翼中对应尾翼位置的升力存在一定程度的下降。
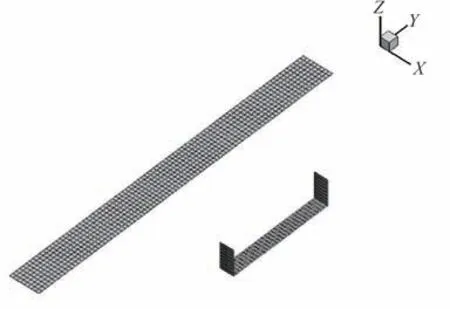
图4 单体无人机气动网格划分Fig.4 Aerodynamics grid of single UAV
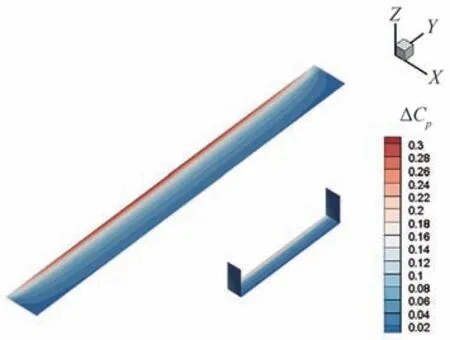
图5 单体无人机气动压强分布Fig.5 Aerodynamic pressure distribution of single UAV

图6 机翼展向升力分布Fig.6 Lift distribution of wing in spanwise

图7 尾翼展向升力分布Fig.7 Lift distribution of tail in spanwise
采用本文方法计算单体无人机模型气动导数,在气动力分析软件ZONAIR[28]中建立相同的气动模型,气动网格划分与涡格法状态空间形式保持一致,给定相同的计算工况条件,2 种方法的计算结果如表2 所示。可以看出本文建立的气动导数计算方法与ZONAIR 软件的气动导数计算结果一致性良好,重要气动导数如CLα、CMyα及CLq等最大偏差在3%左右,与升力相关的气动导数偏差不超过1%。另外,由于算例模型中构型对称,横纵向气动导数解耦,诸如CMxα、CLβ及CLp等横纵向耦合气动导数在2 种方法计算中结果均为0。计算结果验证了本文气动力建模方法及气动导数计算方法的有效性和正确性。

表2 气动导数计算结果Table 2 Results of aerodynamic derivatives
3.3 组合式无人机飞行力学分析
以2 架单体无人机构建组合式无人机为例,进行气动特性分析与气动布局参数影响分析。组合式无人机中将2 个单体固定翼无人机翼尖沿展向铰链连接,只允许各无人机间出现沿机身x轴线的相对滚转运动,其他相对自由度被铰链约束。双机组合示意图如图8 所示。

图8 双机组合示意图Fig.8 Illustration of combination of two UAVs
基于前述飞行力学方程可求解按照指定配平状态求解配平变量[26]。一般而言,飞行器实际飞行满足对称构型飞行姿态。图9 及图10 分别给出了1 号机具有10°滚转角及2 号机具有-10°滚转角情况下的气动网格划分情况及压强分布情况。计算工况仍取飞行速度20 m/s,迎角1°,大气密度1.225 kg/m3。
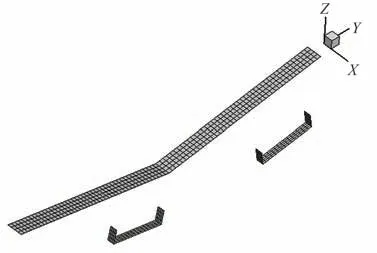
图9 多体组合式无人机气动网格划分Fig.9 Aerodynamics grid of MCA

图10 多体组合式无人机气动压强分布Fig.10 Aerodynamic pressure distribution of MCA
图11 及图12 分别给出了多体组合式无人机机翼及尾翼展向升力分布计算结果,可以看出机翼及尾翼升力分布同样大致满足椭圆分布,符合大展弦比机翼的气动特性规律。由于存在双尾翼物面涡及尾涡的诱导,机翼中对应尾翼位置的升力存在一定程度的下降。
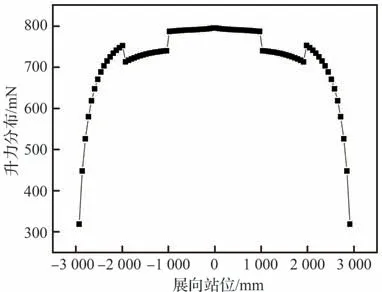
图11 多体组合式无人机机翼展向升力分布Fig.11 Lift distribution of wing of MCA in spanwise
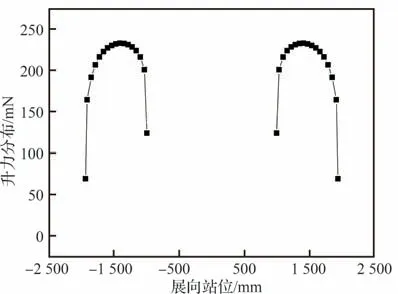
图12 多体组合式无人机尾翼展向升力分布Fig.12 Lift distribution of tail of MCA in spanwise
基于该状态进行飞行力学分析,求解配平变量,计算飞行力学模态。模态求解结果如表3 所示。整机飞行力学模态中除长周期模态外,纵向稳定性模态均收敛,横向稳定性模态中的滚转模态及荷兰滚模态亦收敛。除了传统飞行力学模态外,组合构型因自由度增加在特征值分析中多出现一个发散的飞行力学复合运动模态1 及一个收敛的飞行力学复合运动模态2。基于复合模态1 中的1 号机滚转角对动力学方程特征模态做归一化,即令Δφ1=1,两阶复合运动模态特征向量中角度量分析结果如表4 所示,角速度量分析结果如表5 所示。发散的复合运动模态1 呈现相对向上的“V 字”形态,其特征时间为0.42 s,对飞行力学稳定性有显著影响,飞行器先天不稳定,这是多体组合式无人机在飞行力学特性方面与常规无人机飞行器的显著差异。复合运动模态1 示意图如图13 所示。
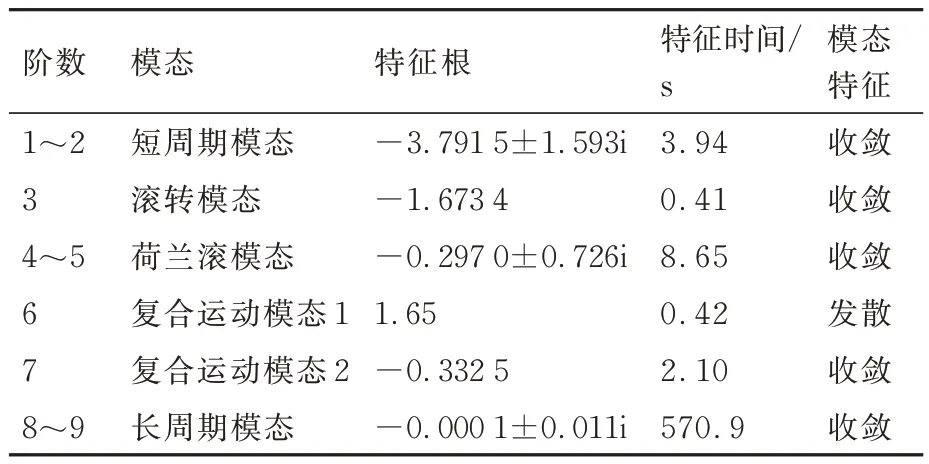
表3 飞行力学模态特征根求解结果Table 3 Results of flight dynamics modes

表4 飞行力学模态特征向量角度量Table 4 Angular components in flight dynamics modes

表5 飞行力学模态特征向量角速度量Table 5 Angular velocity components in flight dynamics modes

图13 发散的飞行力学模态示意图Fig.13 Illustration of divergent flight dynamics mode
4 气动布局参数影响
与传统飞行器不同,组合式无人机中单体无人机滚转角变化会带来整机气动布局的差异,需要针对单体无人机滚转角变化开展参数影响研究。同时,后掠角、机翼尾翼距离及上反角是典型的飞行器气动布局设计参数,单体无人机改变上述气动布局参数同样会带来组合式无人机整机的气动布局变化。本文针对相关参数变化对飞行力学特性的影响,特别是稳定性的影响作简要讨论。
4.1 单机滚转角
本文研究中假设双机飞行中保持“上折”姿态,即1 号机滚转角为正,2 号机滚转角为负。为方便讨论,后文中2 号机滚转角值取绝对值。改变单体无人机滚转角,逐步从1°增加至15°,图14~图18给出了与升力及俯仰力矩相关的重要气动导数计算结果。从左至右分别为组合式无人机整机气动导数计算结果,组合式无人机1 号机气动导数计算结果及组合式无人机2 号机气动导数计算结果。横坐标为1 号机滚转角,纵坐标为2 号机滚转角。定义气动导数展示结果中的45°对角线为两机滚转角一致线,在此线上,1 号机与2 号机滚转角绝对值相同。整机气动导数CLα随两机相对滚转角增大而减小且沿两机滚转角一致线对称分布;1 号机与2 号机的CLα沿一致线非对称分布且无人机自身滚转角对自身气动导数影响最大,这与展弦比逐渐减小时的气动力特性规律相似。类似规律也出现在CLp、CLq、CMyα、CMyq计算中。

图14 气动导数CLα 变化Fig.14 Variation of aerodynamics derivatives CLα

图15 气动导数CLp 变化Fig.15 Variation of aerodynamics derivatives CLp
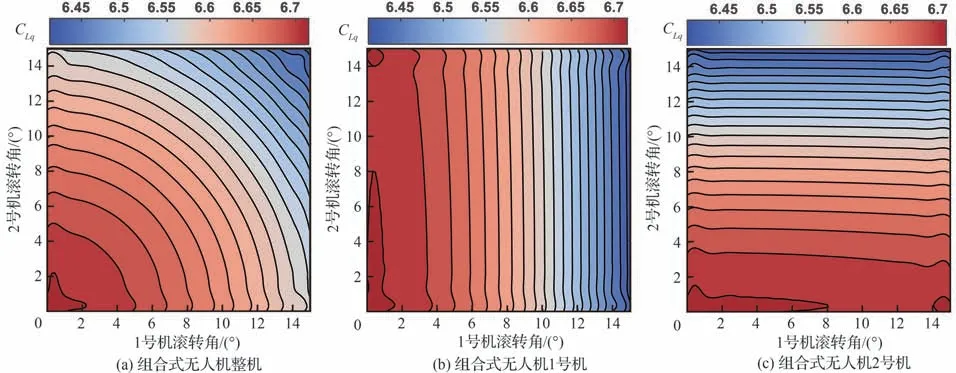
图16 气动导数CLq 变化Fig.16 Variation of aerodynamics derivatives CLq
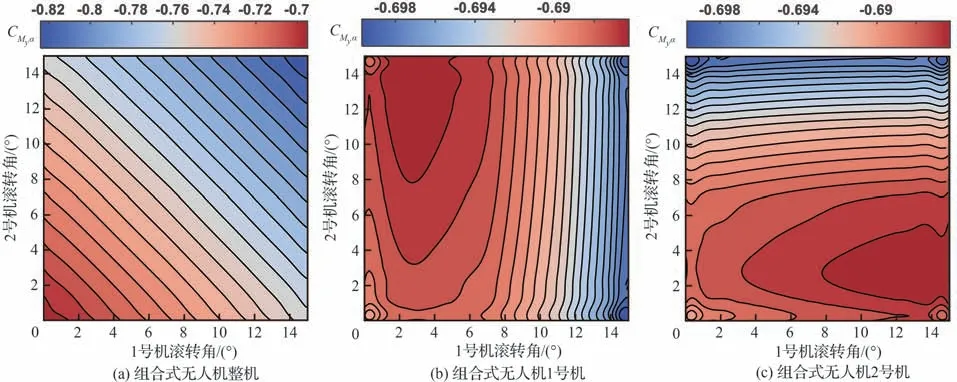
图17 气动导数CMyα 变化Fig.17 Variation of aerodynamics derivatives CMyα

图18 气动导数CMyq 变化Fig.18 Variation of aerodynamics derivatives CMyq
图19 和图20 给出了与滚转力矩相关的重要气动导数CMxα及CMxq计算结果。CMxα属于典型的横纵向耦合气动导数,对于常规布局固定翼无人机而言,CMxα=0。对于具有相对滚转自由度的无人机组合状态而言,当两机滚转自由度不同时,整机构型不对称出现非零CMxα。更重要的,在分析1 号机及2 号机各自的气动导数时,即使两机滚转角相同,由于组合整机满足气动力对称近似的椭圆分布,1 号机和2 号机上也会因为子无人机上气动力分布不对称而具有非零的CMxα,这与传统构型无人机具有显著差别,在分析组合飞行状态下的飞行动力学时,必须考虑该类气动耦合效应,CMxq计算展现了相似的规律。事实上,从气动导数计算结果看出,几乎全部气动导数都存在耦合效应,无人机组合飞行下横纵向气动力无法解耦。
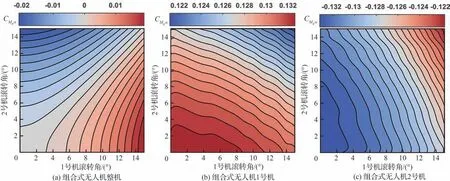
图19 气动导数CMxα 变 化Fig.19 Variation of aerodynamics derivativesCMxα

图20 气动导数CMxq 变化Fig.20 Variation of aerodynamics derivativesCMxq
对称改变各子无人机滚转角,保证两单体无人机滚转角绝对值一致即以对称“上折”姿态飞行。图21 给出了发散复合运动模态特征值随滚转角变化的计算结果。可以发现,系统稳定性随配平滚转角的增大而逐渐减低,具体表现为特征值的增大及发散特征时间的缩短。系统稳定性随配平滚转角的增大而逐渐减低。图22 给出了俯仰角/偏航角特征模态分量随滚转角变化情况,基于复合模态1 中的1 号机滚转角对特征模态分量进行了归一化处理,1 号机与2 号机相同运动分量数值几乎重合。可以发现俯仰角、偏航角分量相对于滚转角而言较小,变化趋势平缓,发散的飞行力学模态并未由以相对滚转为主导改变至其他模态运动形式。
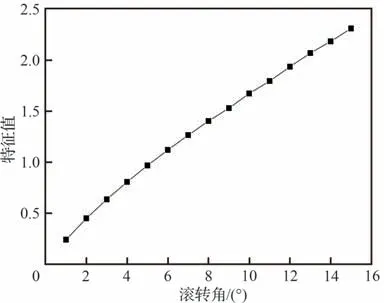
图21 发散模态特征值随滚转角变化Fig.21 Variation of divergence modal eigenvalue with roll angle

图22 发散模态分量变化Fig.22 Variation of divergence modal eigenvector
4.2 单机后掠角
改变单体无人机机翼后掠角,逐步从1°增加至15°,多体组合式无人机飞行动力学特性仍以出现发散的复合运动模态为主要特征。图23 给出了单体无人机后掠布局形式的气动网格划分情况。图24 给出了发散复合运动模态特征值随单机后掠角变化的计算结果。随后掠角增加,特征根实部在保持为正的情况下逐渐减小,特征时间随后掠角增大而增大,双机对称滚转的不稳定性有所改善。

图23 单体无人机后掠布局Fig.23 UAV layout of sweep angle

图24 发散模态特征值随后掠角变化Fig.24 Variation of divergence modal eigenvalue with sweep angle
4.3 单机机翼尾翼间距
改变单体无人机机翼至尾翼距离,逐步从0.7 m 增加至1.3 m,图25 给出了发散复合运动模态特征值随单机机翼尾翼间距变化的计算结果。随着距离的逐步增大,对应特征根保持为正的情况下先减小后增大,特征时间随距离增大出现先增大后减小的趋势,其中距离1.07 m 为极值点。机翼与尾翼距离可能存在改善飞行稳定性的最优值。

图25 发散模态特征值随机翼尾翼距离变化Fig.25 Variation of divergence modal eigenvalue with distance of wing and tail
4.4 单机上反角
改变单体无人机机翼上反角,逐步从0°增加至15°。图26 给出了单体无人机机翼上反布局形式的气动网格划分情况,图27 给出了发散复合运动模态特征值随单机上反角变化的计算结果。多体组合式无人机飞行动力学特性仍以出现发散的复合运动模态为主要特征。但随上反角增加,特征实部在保持为正的情况下变化很小,单体无人机上反角对于整机发散复合运动模态影响很小。
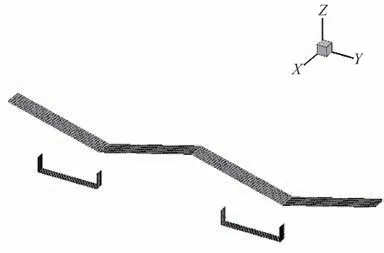
图26 单体无人机上反布局Fig.26 UAV layout of dihedral angle
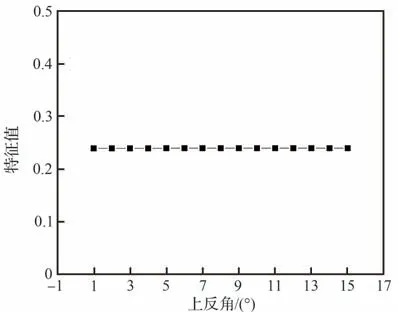
图27 发散模态特征值随上反角变化Fig.27 Variation of divergence modal eigenvalue with dihedral angle
5 结论
基于涡格法状态空间形式推导了适合于考虑气动耦合效应的翼尖铰接组合式无人机气动导数计算方法,基于气动导数模型及Newton-Euler 方程建立多体组合式无人机飞行动力学模型,计算配平状态及飞行力学稳定性。针对翼尖铰接组合式无人机特点,进行了布局参数对飞行力学稳定性影响研究,得到以下结论:
1)状态空间涡格法可以给出解析形式的气动导数计算方法,同时针对翼尖铰接组合式无人机可以得到考虑多机间气动耦合效应的气动导数,经验证计算结果精度好。需要说明的是,机身对于飞行器横侧向稳定性及气动导数具有一定影响,本文方法未考虑机身影响,如何进行准确的机身影响修正将会是后续研究工作的重点。
2)多体组合式无人机飞行力学特性与传统飞行器有较大不同,本文基于Newton-Euler 方程建立多体组合式无人机飞行动力学模型,考虑铰接约束对飞行动力学特性的影响。对于多体组合式无人机,气动导数及飞行力学方程横纵向无法解耦,在配平状态下进行组合下的动力学系统稳定性分析会出现先天不稳定的以相对滚转为主导的复合运动模态,在气动布局设计中需要考虑参数对飞行力学特性的影响。
3)改变单体无人机配平状态滚转角会改变整机气动布局,减小单体无人机配平滚转角可以改善飞行力学稳定性。对于传统布局参数,增加单体无人机后掠角亦可以改善飞行力学稳定性;上反角影响很小;机翼与尾翼距离可能存在改善飞行力学稳定的最优值。
猜你喜欢
中国民航大学学报(2021年4期)2021-09-26
北京航空航天大学学报(2020年3期)2021-01-14
北京航空航天大学学报(2020年10期)2020-11-14
实验流体力学(2017年5期)2017-11-07
北京航空航天大学学报(2017年11期)2017-04-23
北京航空航天大学学报(2016年4期)2016-02-27
西北工业大学学报(2015年4期)2016-01-19
航空学报(2015年4期)2015-05-07
中国铁道科学(2014年1期)2014-06-21
振动、测试与诊断(2014年5期)2014-03-01
