基于最优极化空时自适应处理的低空风切变风速估计方法
2023-10-12 07:22谢雨桐朱玥琪
火控雷达技术 2023年3期
李 海 谢雨桐 朱玥琪
(中国民航大学天津市智能信号与图像处理重点实验室 天津 300300)
0 引言
低空风切变是一种气流在一个较小距离内瞬时变化的大气现象。它出现高度在600m以下,具有突发短暂、持续规模小、破坏性大、危害性大、难以探测等特点[1]。当民航飞机在起降时遭遇到低空风切变,飞机会受到其风场的影响造成颠簸,假如飞行员没有及时调整飞机姿态,就会发生飞行事故悲剧。因此,低空风切变的检测及预警对民航业的安全发展具有重要意义。而低空风切变的风速估计是检测及预警流程的前项步骤,会对低空风切变的检测及预警是否准确产生直接影响,因而准确估计风速就显得尤为重要[2]。
机载气象雷达已成为民航飞机飞行安全的重要电子设备[3],能够最大程度帮助飞机免受危险气象的影响。利用其对风切变进行探测和预警是民航行业规避风险最为直接的方法[4],研究基于机载气象雷达的低空风切变检测和预警是保障飞行安全的有效途径。随着民航领域科技技术水平的提升,机载气象雷达的功能、性能也在不断进步与发展。机载气象雷达可借助双极化、相控阵天线等技术来增强对危险气象目标的识别、评估与告警能力[5]。双极化技术能使雷达获取到丰富的极化信息,利用极化信息能够有效区分气象回波和地杂波,更好地对地杂波抑制[6]。同普通传统机载气象雷达的单天线体制相比,相控阵天线体制在时间与空间上进行采样,具有提高获取信息的时间分辨率,节约扫描时间和雷达资源等优势[7]。针对机载双极化相控阵气象雷达的研究应运而生。自2013年以来,美国国家大气研究中心便一直在进行机载双极化相控阵气象雷达体制下的相关研究[8-9]。因此,研究机载双极化相控阵气象雷达体制下的低空风切变风速估计方法,对于加强风切变环境下的气象保障具有重要意义。
传统的低空风切变风速估计方法有直接数据域-广义相邻多波束[10]、参数化模型[11]、模式分析扩展Prony[12-13]、压缩感知[14]以及基于空时自适应处理(STAP)[15-17]等,以上方法均是针对单极化气象雷达提出。文献[18]利用各通道的极化信息使杂波的协方差矩阵估计更精确,从而使风速估计结果得到提升,但未考虑在极化域上处理。除此之外,并没有其他文献对于机载双极化相控阵气象雷达的风速估计做出相关研究。
基于上述情况,本文提出了一种基于最优极化空时自适应处理(PSTAP)的低空风切变风速估计方法。PSTAP在空时域基础上进一步增加极化域信息,即在空时-极化域联合处理,使其不仅具备STAP所具有的自适应抑制等优势,还具备超越STAP的抗干扰能力[19-20]。本方法首先估计出杂波的协方差矩阵和风切变回波信号的极化空时导向矢量;然后利用最优PSTAP处理器对回波进行处理,使其尽可能地在保留风切变目标信号的同时对杂波进行抑制;最后实现该气象雷达体制下的低空风切变风速估计。同时,利用仿真结果证明了本文方法估计风速的准确性。
1 信号模型
1.1 低空风切变回波信号模型
机载双极化相控阵气象雷达在前视阵下探测低空风切变的位置关系示意图如图1所示。设载机以速度为V,飞行高度H沿X轴方向匀速直线飞行。雷达的天线阵列是由N个正交偶极子对构成间距为d=0.5λ的极化均匀线阵,其中λ为波长;雷达的脉冲重复频率为fr,一次相干处理周期可得到K个脉冲;划分距离门共L个;图1中θ0、φl和ψ0分别代表所探测低空风切变风场的方位角、俯仰角和空间锥角,且有cosψ0=cosφlcosθ0关系式成立。

图1 机载双极化气象雷达探测低空风切变示意图
第l(l=1,2…L)个待检测距离门内的低空风切变目标的回波信号sl为
sl=σ·S
=σ·sp⊗st(fd)K×1⊗ss(ψ0)N×1
=I2⊗st(fd)K×1⊗ss(ψ0)N×1·a
=I2⊗Sst·a
(1)
式(1)中,⊗为Kronecker积;σ为总的风切变回波信号的复幅度;S表示风切变回波的极化空时导向矢量,表达式为
S=sp⊗st(fd)K×1⊗ss(ψ0)N×1
(2)
其中:sp为风切变回波的极化导向矢量;sp=[cosγsinγejη]T[21],γ与η分别代表风切变回波的双极化通道的幅度比与相位差;a=[ahhavv]T=σ·sp,ahh与avv分别为HH与VV通道的风切变回波信号的复幅度;I2代表2×2维的单位阵;fd为该距离门内风切变回波的归一化多普勒频率;st(fd)K×1、ss(ψ0)N×1及Sst分别为该待距离门内的风切变目标信号的时域导向矢量、空域导向矢量及空时导向矢量,它们的关系式分别为
st(fd)K×1=[1,exp(jπfd),…,exp(jπ(K-1)fd)]T
⊙g(σfd)
(3)
(4)
其中,⊙为Hadamard积;
Sst=st(fd)K×1⊗ss(ψ0)N×1
(5)
g(σfd)=[1,exp(-2π2σfd),…,
exp(-2π2(K-1)σfd)]T
(6)
式(6)为该距离门内风切变回波信号的频率扩展函数;
(7)
式(7)为该距离门内风切变回波信号的角度扩展函数;
(8)
式(8)中,σθ0表示θ0在风切变回波信号的水平方位角方向上的扩展;σφl表示φl在风切变回波信号的俯仰角方向上的扩展[22]。
1.2 地杂波回波信号模型
本文假设地杂波是没有起伏和模糊的。如图1所示,在雷达探测范围内划分L个距离单元,再将每个距离门内的地面杂波按照方位角均匀划分成M个杂波块。其中第m(m=1,2…M)个地杂波块的俯仰角设为φl,c,对应的空间锥角设为ψs,m;水平方位角设为θl,m,对应的归一化多普勒频率设为fd,m,它们的关系式分别为
(9)
那么可以得到杂波的时域及空域导向矢量分别为

(10)
第l个待检测距离单元内雷达接收到的极化地杂波可建模为[20]
(11)
式(11)中:σc是每个杂波块回波信号的幅度;sc,p是每个杂波块的极化散射矢量,可通过式(12)计算得到[21]
(12)
式(12)中:Rp称为杂波的极化协方差矩阵;ρ、γc表示HH与VV通道的互相关系数和功率比;“*”表示复共轭。在进行数据仿真时,可以先确定Rp中ρ与γ的值,再得到相应的sc,p值。
1.3 双极化气象雷达回波信号模型
双极化气象雷达第l个待检测距离门内的数据矢量可用xl=[xhhxvv]T来表示,xhh与xvv分别为HH通道与VV通道接收的数据矢量,xl表达式为
xl=sl+cl+nl
=I2⊗Sst·a+cl+nl
(13)
式(13)中:sl表示第l个待检测距离门内低空风切变目标的回波信号;sl表示第l个待检测距离门内的地杂波;sl表示第l个待测距离门内的加性高斯白噪声。
2 基于最优PSTAP的低空风切变风速估计方法
本章首先估计出风切变回波的极化空时导向矢量,其次构建最优PSTAP处理器,利用最优处理器权矢量对双极化机载相控阵气象雷达的回波信号进行处理,最后完成低空风切变风场的风速估计。下面分别对风切变极化空时导向矢量的估计及最优PSTAP处理器构建进行阐述。
2.1 风切变回波极化空时导向矢量估计
式(2)中风切变回波的极化空时导向矢量由其极化导向矢量sp、时域导向矢量st(fd)K×1及空域导向矢量ss(ψ0)N×1三者进行Kronecker积得出。其中时域导向矢量st(fd)K×1及空域导向矢量ss(ψ0)N×1由式(3)及式(4)计算得到,但sp的表达式中γ与η均属于未知量,由a=σ·sp=σ·[cosγsinγejη]T可知,γ与η信息包含于矩阵a中,因此若想得到风切变回波的极化导向矢量sp,首先需要估计出a的值。
(14)
式(14)中R为杂波协方差矩阵,其为未知量,需要通过估计得到。通常,当目标为点目标时,用于估计杂波协方差矩阵的相邻距离门数据仅含有杂波加噪声,但本文的风切变目标为分布式目标,导致协方差矩阵求解时,相邻距离门数据中,除杂波与噪声外还含有风切变信号。因此下面详细说明包含风切变、杂波以及噪声的相邻距离门数据估计出的杂波协方差矩阵,可以代替仅用杂波加噪声的相邻距离门数据估计出的杂波协方差矩阵。


(15)

(16)
将式(16)接着展开为
(17)
(18)
(19)
根据NASA测得的数据,实际机载气象雷达在进行风切变检测时,大部分情况下杂信比在30dB~60dB区间[23],因此分为40dB和50dB杂信比两种情况来进行说明。
在临床上,冠心病合并心绞痛比较常见,且多为老年人,近年来发病率有所上升,给老年人的生活带来了严重的影响[1]。对冠心病合并心绞痛患者进行及时的治疗是非常重要的,然而当前的常规护理方法对患者的恢复所起到的效用比较小,在护理模式逐渐改变的背景下,优质化护理干预方式应运而生,也逐渐应用在了该疾病的治疗中[[2]。本文选择2016年04月~2017年01月间收治的83例冠心病合并心绞痛患者为研究对象,探究优质化护理干预对此病的护理效果,现将详细的护理内容作如下分析:


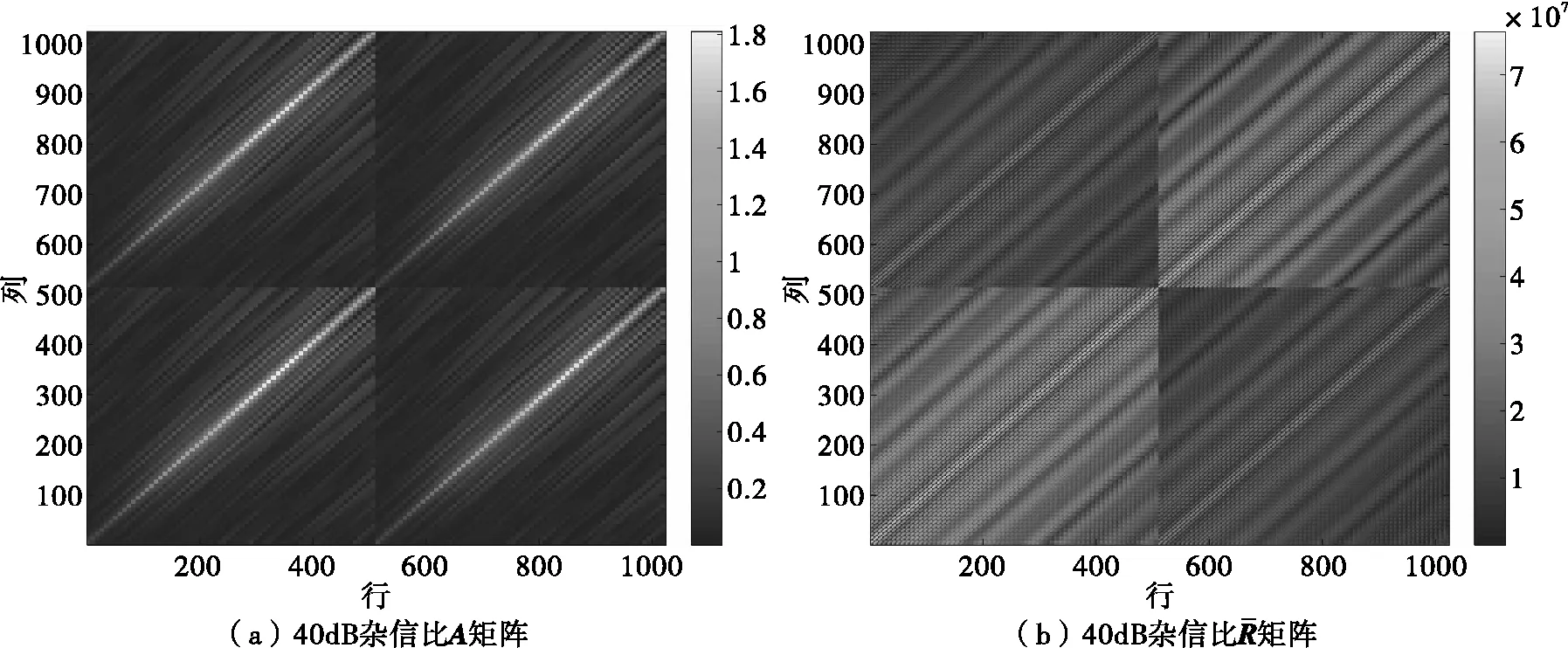
图2 40dB杂信比下矩阵中每个元素的模
图3 50dB杂信比下矩阵中每个元素的模
(20)

(21)
为求该函数的最大值,式(21)两边同时对aH求导求极值,具体推导过程见式(22)所示。
(22)
令式(22)等于0,可得a的最大似然估计为
(23)

(24)

(25)
2.2 基于PSTAP的低空风切变风速估计
极化空时自适应处理器可实现对地杂波的抑制和目标信号的积累,本质上,最优处理器可以等效成数学优化问题[24]。经过上述处理估计出风切变回波的极化空时导向矢量及杂波的协方差矩阵后,设计最优PSTAP处理器对雷达的回波信号进行处理。可以通过数学表达式(26)求解最优权矢量为
(26)

求解得到ω的表达式为
(27)
利用最优权矢量ω对待检测距离门的回波数据xl进行加权处理,得到处理后的数据为
y=ωHxl
(28)

(29)
进而得到第l个待检测单元的低空风切变风速估计结果为
(30)
3 方法流程
本文所提方法流程图如图4所示。
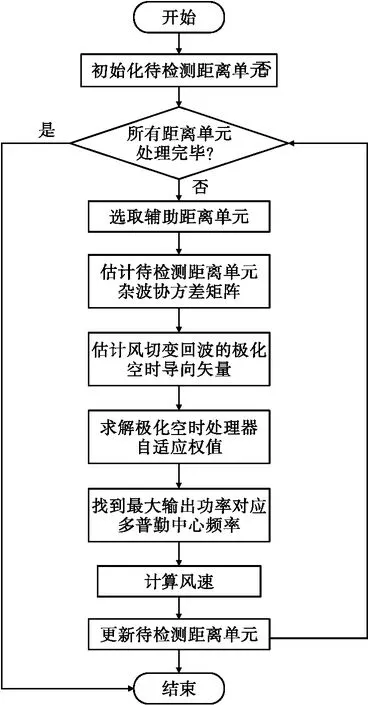
图4 基于最优PSTAP的低空风切变风速估计方法流程图
本文所提方法能够结合极化域、空时域进行杂波抑制,同时估计出风速,具体步骤如下:
1)步骤1:从相关航空设备中读取载机速度V、载机高度H、雷达天线工作的主瓣方位角θ0和俯仰角φ0等已知的先验信息备用;
2)步骤2:估计出待测距离门杂波的协方差矩阵、估计分布式目标风切变的极化空时导向矢量;
3)步骤3:设计PSTAP处理器,求解PSTAP处理器的权值,对雷达回波信号进行处理;

5)步骤5:将全部距离门处理后,输出最终估计风速结果。
4 实验结果分析
4.1 仿真条件设置
低空风切变风场位于飞机前下方,距离飞机8.5km~16.5km处。杂波的仿真参数为互相关系数ρ=0.52,功率比γc=1.03。雷达的仿真参数如表1所示。

表1 系统仿真参数
4.2 仿真结果分析
图5分别展示了HH与VV极化通道前视阵下,机载双极化相控阵气象雷达检测低空风切变时,回波信号的距离多普勒图。从图5中可以看出每个极化通道下的杂波多普勒信息越接近零频处就越强;低空风切变回波信号多普勒信息呈反“S”型淹没于杂波之中。

图5 前视阵下HH通道与VV通道回波信号距离多普勒图
图6分别展示了HH与VV极化通道前视阵下,机载双极化相控阵气象雷达检测低空风切变时,回波信号的空时二维谱。地杂波在图中表现为半圆形分布,是因为机载前视阵下地面杂波具有空时耦合特性;低空风切变呈带状,是因为风切变是分布式目标,导致风切变回波信号谱具有一定的展宽。

图6 前视阵下HH通道与VV通道回波信号空时二维谱
从上述图片及描述可知,地杂波无论是功率还是范围都比低空风切变信号要大的多,这就导致风切变回波信号完全被杂波包含,这是造成低空风切变估计不准确的重要因素。
图7以第57个距离门为例,展示了本文所提方法与单HH通道STAP方法、文献[18]所提方法的改善因子曲线图的对比。对图7分析可知,本文所提方法相比于另外两种风速估计方法,改善因子曲线凹口在主杂波区(零频)更窄,这说明本文方法对杂波的抑制效果更好,从而得到更为准确的风速估计结果。

图7 第57号距离单元改善因子曲线图
图8为本文所提方法与单HH通道STAP、文献[18]所提方法用于机载双极化相控阵气象雷达的低空风切变风速估计对比。图8中可以非常直观地看出本文方法的风速估计最为准确。通过计算这些方法与原始风速的均方根误差来进一步对比各方法的有效性。

图8 各方法风速估计结果对比图
表2为不同方法下风速估计均方根误差对比。表中数据直观地表明:本文所提方法与其他两种风速估计相比,其均方根误差值最小,从而证明了本文所提方法估计风速的精确性。
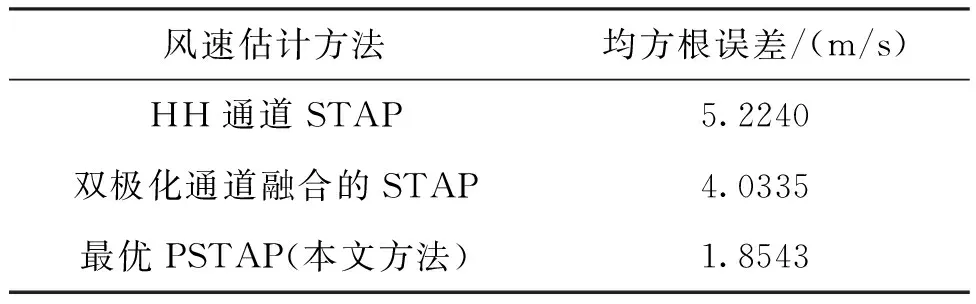
表2 三种方法下风速估计均方根误差对比
5 结束语
本文立足于机载双极化相控阵气象雷达体制,针对其探测低空风切变时的风速估计问题,提出一种基于最优PSTAP的低空风切变风速估计方法。该方法在极化-空时域进行处理,首先利用最大似然的思想估计出杂波的协方差矩阵及分布式风切变目标的极化空时导向矢量,将其代入求解最优PSTAP处理器权矢量,利用最优对机载双极化相控阵气象雷达的回波信号进行处理,最终实现该气象雷达体制下低空风切变的风速精确估计。同时利用仿真结果与其他方法对比来说明所提方法的优越性。
猜你喜欢
现代财经-天津财经大学学报(2022年5期)2022-06-01
科学与信息化(2021年30期)2021-12-24
电子测试(2017年15期)2017-12-18
北京航空航天大学学报(2017年9期)2017-12-18
南方文学(2016年3期)2016-06-12
中国房地产业(2016年8期)2016-03-01
兵器知识(2016年2期)2016-01-29
西北工业大学学报(2015年3期)2015-12-14
电源技术(2015年1期)2015-08-22
遥测遥控(2015年2期)2015-04-23