
广义回归神经网络在冗余捷联惯导故障诊断中的应用研究
2020-09-22 12:39乔鹏超孙湘钰罗广地
导航定位与授时 2020年5期
乔鹏超,孙湘钰,罗广地
(哈尔滨工程大学自动化学院,哈尔滨 150001)
0 引言
冗余捷联惯导故障诊断技术是提高冗余系统可靠性[1]的有效途径,故障诊断技术要求算法具有反应速度快、故障诊断准确、能实时诊断和算法易实现的特点,是冗余配置捷联惯导算法研究的一个难点。Kevin C Daly等[2]基于统计方法提出了广义似然比法;金宏等[3]以对某个轴故障最敏感为评价指标,提出了最优奇偶向量法;Duk Sun Shim等[4]基于矩阵向量的奇异值分解,提出了奇异值分解法。这些方法在实际使用时,由于捷联惯导输出存在安装误差、刻度系数误差、常值偏差等测量误差[5],导致必须使用更大的门限检测值[6],使得虚警率增大,系统的可靠性降低。针对测量误差影响故障诊断效果的问题,文献[7-9]提出了利用Kalman滤波方法估计误差,然后采用补偿后的等价向量[10]进行故障诊断。上述方法在实际使用中都收到了比较良好的效果,但都要求动态误差模型和较准确的噪声统计特征。
本文提出了基于广义回归神经网络(Generali-zed Regression Neural Network,GRNN)的故障诊断方法,在传感器故障诊断数学模型未知的情况下,对传感器单故障和多故障的故障诊断问题进行了研究。
1 GRNN网络模型
神经网络在故障诊断方面具有以下优越性[11-12]:1)可避免数据分析和建模工作,通过观测样本神经网络就可以找到隐藏的信息;2)处理数据速度快,不需要进行大量数学运算,信息存储和处理合二为一;3) 具有实时性。由于神经网络之间的并行计算结构,神经网络具有很强的集体计算能力,完全可以实时估计出所求的值。
GRNN结构[13]是一种基于记忆模式的具有单隐层的三层前馈网络,其结构如图1所示。

图1 GRNN网络结构图Fig.1 GRNN block diagram
GRNN理论基础是非线性回归分析[14]。非独立变量Y相对于对立变量x的回归分析,实际上是计算具有最大概率的y。设随机变量x和y的联合概率密度为f(x,y),已知x的观测值为X,则y相对于X的回归,即条件均值为
(1)



(2)
式中,Xi和Yi为随机变量x和y的样本观测值;n为样本容量;p为随机变量x的维数;σ为带宽系数,也称作平滑因子。


(3)

(4)
GRNN的输入神经元数和输出神经元数分别取决于系统输入和输出变量数,隐含层神经元数会自动调整,直到满足均方误差。GRNN平滑参数σ对其性能有很大影响。理论上,σ越小,对函数逼近越精确,但逼近过程越不平滑;σ越大,逼近越平滑,但逼近误差越大。所以在网络训练过程中,要选择合适的σ值[15]。
2 故障诊断算法
2.1 GRNN网络训练
根据冗余捷联惯导传感器故障诊断模型,作出如下假设。假定该冗余配置方案的n传感器,满足以下条件:
1)任意k个传感器Xk都能以精度ε计算出其余n-k个传感器Yk的输出(k≥3)。
(5)
2)Xk中的任意一个或一个以上传感器发生故障,均会导致Yk输出值发生改变。
3)系统中同时出现故障的传感器不超过n-(k+1)个。
本文以6传感器(陀螺或加速度计)正12面体冗余配置的捷联惯导系统为例(见图2),验证了所提算法的有效性。在满足上述条件的情况下,每一对Xk和Yk组合训练一个多输入多输出(Multi-Input Multi-Output, MIMO)的GRNN,共可以训练K个。
(6)
在GRNN训练中发现,如果用同一个平滑参数训练MIMO网络,会导致输出估计误差较大。为了减小该误差,将上述MIMO网络分为3个多输入单输出(Multi-Input Single-Output, MISO)网络进行训练。又由于每个传感器均存在测量噪声,所以训练时应避免使参数误差估计过小而出现过拟合现象。
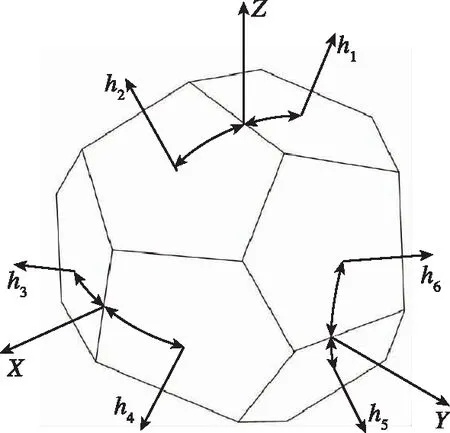
图2 传感器正十二面体配置方案Fig.2 Regular dodecahedron configuration of sensors
2.2 故障诊断过程

在满足2.1节3个条件下的故障检测过程如下[16-17]:




图3 故障诊断流程图Fig.3 Fault diagnosis tree
3 仿真验证
3.1 数据提取和分析
本文以6个单自由度陀螺仪安装在正12面体构成的冗余结构为例(图2),研究单陀螺发生故障和多陀螺同时出现故障时的故障诊断问题。
仿真环境:安装误差角为15″;刻度系数误差为5×10-5;传感器常值偏置量为0.05(°)/h;量测噪声ε为0.01(°)/h。假设载体以300m/s作匀速机动,仿真时长8ks。无故障时采集陀螺测量值。由2.1节,把任意3个陀螺作为输入,另外3个陀螺作为输出,一共构建K=20个神经网络。训练时,先对样本做一些处理,首先使所有数据都分布在[-1,1]范围内,输入数据归一化和反归一化处理采用premnmx函数。利用Matlab进行仿真[12],平滑参数σ根据不同的网络训练,选取不同的值。
3.2 分析
(1)单陀螺出现故障
假设4号陀螺在第4ks的时候出现0.5(°)/h的偏置故障。首先从所有GRNN中找到具有可疑故障陀螺数最少的GRNN。本例是由1、3、6号陀螺为输入, 2、4、5号陀螺为输出的GRNN(记为G1),可疑故障陀螺数最少,为1个。其4号陀螺输出值(图中红色粗线)和预测值(图中蓝色细线)的比较如图4所示,4号陀螺输出值与预测值的估计残差如图5所示。

图4 4号陀螺输出值与预测值比较Fig.4 Comparison of output value and prediction value of gyro No.4
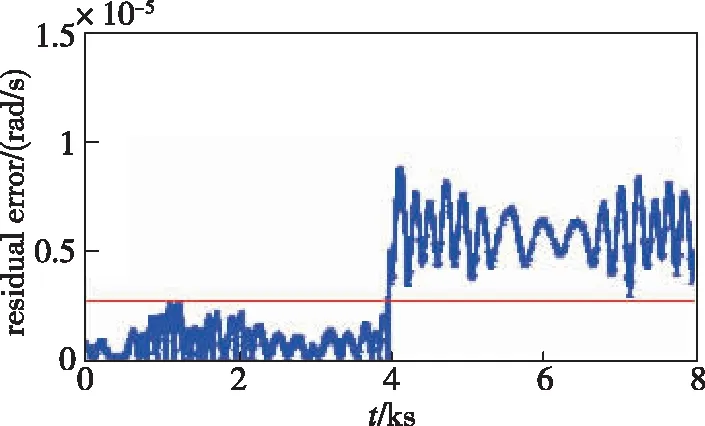
图5 4号陀螺故障检测的残差估计Fig.5 Residual estimation of gyro No.4 fault detection
由图4可以看出,训练良好的GRNN能很好地预测陀螺输出,这为故障检测创造了必要条件。当4号陀螺出现故障时,由图5可以看出,残差(蓝色粗线)超出检测门限(红色细线);而G1的其他陀螺估计残差(图6),都远远没有超出门限。由此判断出可疑故障陀螺为G1中的4号陀螺。
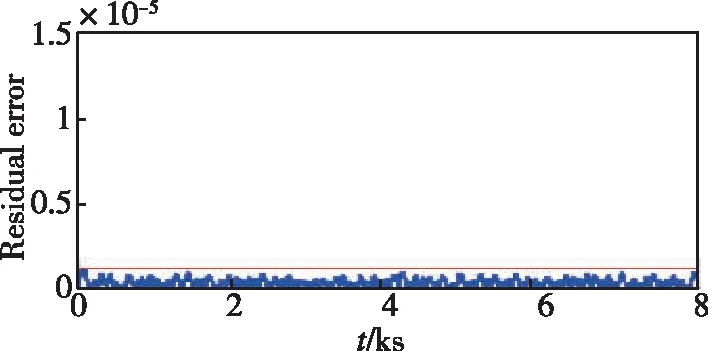
图6 G1其他陀螺的残差估计Fig.6 Residual estimation of other gyroscopes in G1
作为验证,找出一个以4号陀螺为输入的GRNN。例如找到以2、3、4号陀螺为输入,1、5、6号陀螺为输出的GRNN(记为G2),把G1的4号陀螺估计值作为G2的4号陀螺输入,而G2的其他陀螺输入继续采用原来的值,检测G2 3个输出陀螺的残差,发现都没有超过门限,因此判断4号陀螺发生故障。
(2)多陀螺同时出现故障
本例中,假设1号陀螺在第4ks时出现0.8(°)/h的偏置故障,2号陀螺出现0.5(°)/h的偏置故障。
首先,从所有GRNN中找到具有可疑故障陀螺数最少的GRNN。本例是由3、4、5号陀螺为输入, 1、2、6号陀螺为输出的GRNN(记为G3),可疑故障陀螺数最少,为2个。其1号陀螺输出值与预测值的估计残差如图7所示,2号陀螺输出值与预测值的估计残差如图8所示。
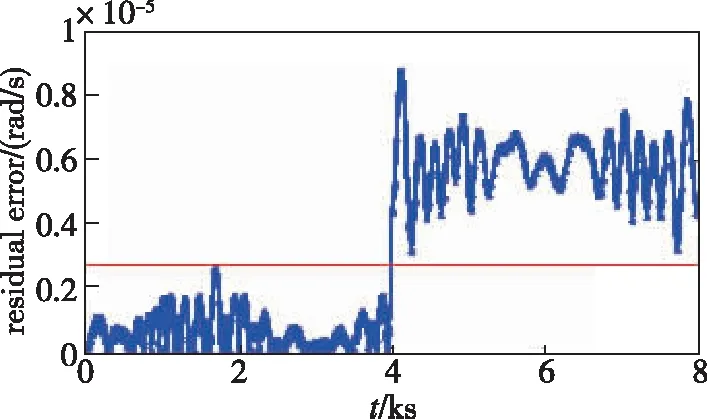
图7 1号陀螺故障检测的残差估计图Fig.7 Residual estimation of gyro No.1 fault detection
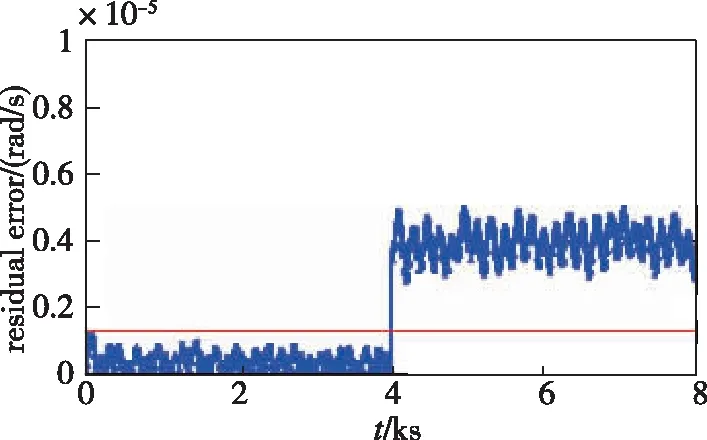
图8 2号陀螺故障检测的残差估计图Fig.8 Residual estimation of gyro No.2 fault detection
由图7和图8可以看出,1号和2号陀螺残差超出检测门限,判断可疑故障陀螺为G3中的陀螺。
作为验证,找出以1、2号陀螺为输入的GRNN。例如找到以1、2、3号陀螺为输入,4、5、6号陀螺为输出的GRNN(记为G4),把G3的1、2号陀螺估计值作为G4的1、2号陀螺的输入,而G4的其他陀螺输入继续采用原来的值,检测G4 3个输出陀螺的残差,发现都没有超过门限,因此判断1、2号陀螺均发生了故障。
4 结论
本文研究了利用GRNN预估传感器输出和传感器正常工作时的测量值生成残差进行故障诊断,通过仿真试验分析得出以下结论:
1)本文通过比较传感器输出值和用GRNN预测产生残差进行故障诊断的方法,成功检测到未补偿时难以检测的小幅值故障,为后续研究提供了新思路。
2)该方法不需要复杂的数学模型,也不需要对传感器检测中的误差进行处理,就实现了对传感器单故障和多传感器同时发生故障时的良好检测效果,具有一定的实用价值。
3)在故障检测时,本文采用的是固定阈值,使得对小幅值故障检测能力不足,后续可以改用自适应阈值来进一步提高小幅值故障的检测能力。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
成都信息工程大学学报(2022年2期)2022-06-14
北京大学学报(自然科学版)(2022年1期)2022-02-21
导航定位与授时(2022年1期)2022-02-18
数字海洋与水下攻防(2020年5期)2021-01-04
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2019年9期)2019-10-26
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
快乐语文(2018年36期)2018-03-12
