
基于虚拟仿真的轨道车辆车钩三态的实验教学设计与实现
2025-03-05 00:00:00陈峰邹杨华张书增
电脑知识与技术 2025年2期


摘要:随着计算机技术的快速发展,目前虚拟仿真技术已经成为“人工智能+”背景下实验教学的一种有效手段。为此,文章在车辆工程实验教学中,设计了基于虚拟场景的轨道结构认知与操作实验,以提高学生对轨道车辆结构认知和现场实操能力。该实验以虚拟车钩三态作为研究对象,给出了从零部件三维造型、贴图、三维场景建立到交互式控制的车钩三态虚拟实验的设计与实现过程。文章研究的虚拟实验方法能满足学生自主化协同实验需求,有利于锻炼学生工程实践能力的提高,助力高校培养新工科人才。
关键词:轨道车辆;车钩三态;虚拟实验;教学设计;unity3D
中图分类号:U270.34 文献标识码:A
文章编号:1009-3044(2025)02-0001-03 开放科学(资源服务) 标识码(OSID) :
0 引言
2019 年 10 月,教育部发布《关于一流本科课程建设的实施意见》(教高〔2019〕8 号) ,指明了教育部进一步推进信息技术与高等教育实验教学的深度融合、加强高等教育实验教学优质资源建设与应用的发展导向。实验教学是作为一种重要的教学方式,能够更好地激发学生学习的兴趣,使其掌握基础知识,并培养学生手脑并用的能力。相比传统的实验教学,虚拟仿真实验教学技术让学生不受时空的限制,可同时容纳大规模的学生操作,具有更好的交互性等特点,在各教学领域得到了广泛的关注。
现阶段,我国的轨道交通技术处于世界领先地位,对社会发展和经济增长的推动发挥巨大作用,而轨道交通高层次人才的培养对轨道交通技术的发展起到关键作用。通过实践能够培养具备创新意识的高素质学生,巩固其对轨道交通相关理论知识的认识和理解,培养学生掌握科学方法,提高实际操作能力。通过虚拟仿真实验可以弥补现场实验的不足,进一步丰富学生的认识和理解。因此,建设并利用好轨道交通专业人才培养的实践平台和条件,是继续保持我们在轨道交通方面领先地位的一个重要举措。
当前,新工科人才的培养目标要求高校的教学要实现从学习成果导向到目标导向(OBE理念) 转变,培养科学、人文和工程三元融合的创新创业型高质量新时代人才。实验教学在高等院校培养学生技术能力、创新创业能力起着的重要作用,但据统计,目前我国200多所高校都开设轨道交通相关专业,专业实验教学存在成本高、耗时长等弊端,该专业的实验教学改革成为学者们研究的重要课题。近年来,3D 可视化软件和虚拟仿真技术日新月异,为高等学校专业课程的实验教学提供了新思路新方法。陈双喜[1]提出了一套基于转向架数字孪生体的轨道车辆动力学实践教学系统。该系统采用孪生数据进行实验教学改革有利于直观展示车辆动力学性能动态变化,有效实现了培养学生解决实际工程的能力的目标。石晓玲[2]采用虚拟仿真技术改革轨道车辆强度课程的实验教学,并提出“基础-专业-创新-人文”四层次的实验教学方法,该方法一方面降低了实验成本,另一方面提高了学生的工程实践能力,激发了学生科学探索精神,有利于培养学生的敬业精神。李晓鹏[3]基于 Unity 3D 技术研发构建了包括轨道车辆驾驶、设备拆装、检修工艺流程等虚拟仿真实验教学资源库,为大型轨道交通实验设备仿真提供很好的参考。由此可见,通过虚拟仿真实验的形式在实验教学环节可以发挥较好的作用,为当前的实验教学改革提供一种思路。
基于以上情况,选取了轨道交通实验对象,在分析当前课程实验的重点和难点基础之上,提出基于虚拟仿真技术改革实验教学的方法。在虚拟仿真实验中将建立CAD模型并设计其装配关系,基于Unity3D 技术、虚拟现实平台构建开放式网络化的虚拟实验教学系统,根据学生实验效果反馈再优化和改进虚拟实验。将该虚拟仿真实验教学方法应用于实验教学过程中,通过对督导、学生反馈意见收集以及课程教学反思自我评价,以分析虚拟仿真实验教学改革的效果和持续改进方法。
1 当前教学中存在的问题
轨道车辆的相关理论及应用是轨道交通专业人才培养的重要部分,且其中包含了大量的现场实践环节,如转向架的制造、装配及调试相关的现场实践,通常需要组织学生跨省到轨道交通装备制造企业,因此存在效率低、成本高等诸多问题,同时存在特殊情况下难以成行的情况。在专业课程中,车辆工程是一门实践性较强的关于轨道车辆设计及检修技术的课程,该课程实验教学核心是让学生掌握轨道车辆相关设计的相关理论、方法和工具的应用,让学生掌握轨道车辆设备结构原理及检修工艺流程。然而,该课程实验教学还面临着学生对车辆内部结构认识不足、实验教学中学生操作耗时长以及难以重复进行操作等问题,具体表现如下:
① 轨道车辆涉及构造车辆结构、机械振动理论、轮轨接触原理、理论力学多个学科专业知识。采用传统文字、图片的方式难以让学生对车辆的各部分具体构造有直观认识。而采用实体设备进行实验实训存在实验场地空间需求大、建造周期长以及实验成本高等难以解决的困难。
② 目前的实践教学中采用实体实验的教学方式,学生在上机操作时,由于学生人数较多,以45 名学生的教学班计算,全班同学做完一次实验耗时近20个学时,因此实验教学效率极其低下。另外为保证实验安全性,选取的实验项目类型固定且操作流程简单,因此,无法对学生进行全方位训练,难以达到预期的教学效果。
③ 传统的实验教学教学方法,轨道车辆类型复杂,不同车辆的组成结构存在差异性。由于实验成本、实验场地和安全隐患等方面的问题,因此,许多高校开放性的实验数量较少,且学生实验结束之后难以有再次操作的机会。难以培养学生的工程实践能力、创新创业能力,不利于实现新工科人才的培养目标,无法满足当前国家需要大量的高素质现代化人才的需求。
如果借用先进的计算机图形学、语音识别、图像识别、VR/AR技术,建成真实感及交互性很强的转向架制造、装备及调试的虚拟实践条件,不仅可以丰富教学方法及手段,培养学生实验兴趣和提高轨道车辆实践实验的培养质量。因此面向车辆工程课程的实验教学,采用虚拟仿真技术可以生动形象地展示轨道车辆一些关键设备实际构造结构以及技术原理,使学生能够对轨道车辆的构特点、结构体系,形成较生动清晰的感性认知,激发学习热情。有利于虚拟仿真技术在轨道交通领域的应用推广,为一些轨道交通实验设备仿真资源的建设提供了有益的参考。
2 轨道车辆车钩三态的实验教学设计与实现
2.1 虚拟实验的选取
在轨道车辆教学的相关实验较多,且虚拟实验包括验证型实验、设计型实验、创新型实验三类。其中,验证型实验以展示及验证轨道车辆的理论知识为主,如转向架等轨道车辆结构认知实验。设计型实验需要设计详细的实验步骤,希望学生根据实验步骤和个人操作得到相关实验结果,以达到深刻理解实验规律的目的。创新型实验要求学生根据提供的实验模块进行自由组合,从而在实验中探索出新发现。前面二类服务于教学需求,第三类满足学生对科技创新实验的需要。
本研究选取验证型及设计型开展虚拟实验研究的初步尝试,车端连接装置是车辆中重要的部件组合,装置的主要功能包括连接机车车辆、减缓列车的纵向冲击、传递列车电力等[4],其中车钩又是车端连接装置的主要部件,让学生理解车钩的结构和动作原理是主要教学目标之一,车钩三态又是教学的难点,如何通过虚拟实验协助实现教学目标具有重要意义,因此在下一节重点介绍车钩三态的虚拟实验设计和实现过程。
2.2 虚拟实验的设计与实现
车钩得三态是指车钩得锁闭、开锁和全开三种位置状态。在虚拟实验中,车钩的锁闭状态是通过将钩锁铁底部放置在钩头内表面上实现的,钩锁铁的一侧被钩头内壁阻挡,另一侧挡住钩舌尾部,从而使钩舌在钩头内无法绕钩舌销旋转。当车钩处于锁闭状态时,移动钩锁铁,使其下端与钩舌尾部设置在一个平面内,钩锁铁不再阻碍钩舌的旋转。在这种情况下,如果实验学生通过施加牵引力移动钩舌,就能使其绕钩舌销旋转,从而实现开锁。当车钩处于开锁位置后,实验者继续牵引钩提杆,使锁提销继续往上提升,钩锁铁的顶部被钩头内肩阻挡而使得钩锁铁向后转动,带动钩舌推铁,使推铁转动,钩舌绕钩舌销转开成全开状态[5]。
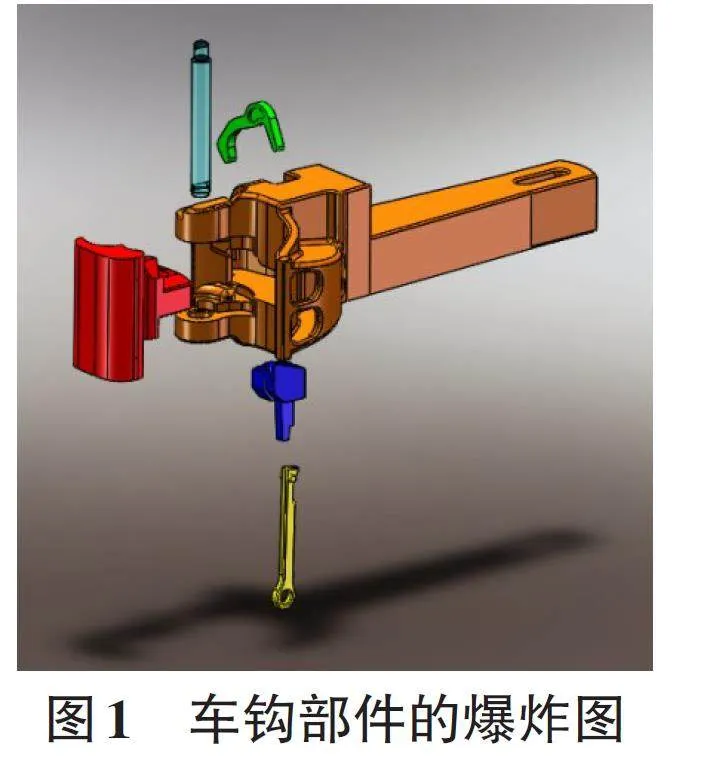
虚拟实验场景以VR头盔展现,通过手柄进行视图控制和交互。通过三维建模软件SolidWorks建立车钩组件钩头、钩舌、钩锁铁等三维模型,其爆炸图如图1所示。将三维模型导出为STEP格式的文件,在3DMAX软件中对车钩部件三维模型进行浏览以及贴图处理,以FBX文件格式导出处理好的车钩部件,导入Unity3D虚拟仿真开发平台[6]。
将车钩的每个部件,作为独立游戏对象(GameOb⁃ject) 导入后,为每个部件添加相应的交互式控制脚本,通过手柄控制每个部件的选中、平移、旋转等操作。选中待拆解部件,然后跟随手柄移动,实现车钩部件的拆解[7]。以下函数实现了选定部件在手柄控制下的移动。
void OnMouseDown()
{
var deviceright = SteamVR_Controller. Input((int)tracked.index);
//当前物体对应的屏幕坐标
Vector3 screenVec = Camera.main.WorldToScreen⁃Point(transform.position);
//偏移值=物体的世界坐标,减去转化之后的鼠标世界坐标(z轴的值为物体屏幕坐标的z值)
Vector3 vMouse = new Vector3(Input. mousePosi⁃tion.x, Input.mousePosition.y, screenVec.z)
m_Offset = transform. position - Camera. main.ScreenToWorldPoint(vMouse);
while(deviceright. GetPress(SteamVR_Controller.ButtonMask.Touchpad))
{
Vector2 cc = deviceright.GetAxis();
float angle = VectorAngle(new Vector2(1, 0), cc);
if (angle gt; 45 amp;amp; angle lt; 135)
{
//当前坐标等于转化鼠标为世界坐标(z轴的值为物体屏幕坐标的z值) + 偏移量
Vector3 vMouseN = new Vector3(Input.mousePosi⁃tion.x, Input.mousePosition.y, screenVec.z)
transform.position = Camera.main.ScreenToWorld⁃Point(vMouseN) + m_Offset;
}}}
在组装部件时,通过编程来确保每个部件正确地连接在一起。例如,可以在钩舌的控制器中添加一个连接点,并在连接点附近放置一个可连接的部件(如钩舌销) 。在可连接部件移动过程中,判断与连接点的距离,如果小于指定值,则说明装配成功,重新设置可连接部件的坐标为初始坐标,完成部件组装[8]。
void Update()
{
float step = Speed*Time.deltaTime();
gameObject. transform. localPosition = Vector3.Movetowards(gameObject. transform. localPosition, con⁃nectPoint, step);
}
为了保证两车钩能够实现自动连挂,在车辆连挂之前,须使其中的一个钩处于全开位置,钩舌张开。当车钩在闭锁位置或开锁位置时,在车钩提杆部件脚本中,通过手柄状态的判断,控制其沿着重力方向移动指定距离,同时上锁销、上锁销杆对象带动钩锁对象上升至指定位置,获得钩舌推铁对象,并通过其自身的轴横向旋转,推动钩舌推铁的另一端向前推动钩舌尾部,从而使钩舌对象围绕钩舌销对象旋转,使钩舌开并达到全开位置。
连挂车辆时,一方车钩处于全开位置,另一方车钩处于闭锁位置,两车接近时,通过Unity3D的碰撞检测功能判断前后车钩的钩舌已接触后,全开位置的钩舌尾部被另一方钩舌推动,在控制脚本中,按一定的时间间隔,控制钩舌对象以钩舌销为轴旋转。转动到一定位置,即钩舌尾部完全进入沟头内腔时,控制钩锁、上锁销,上锁销杆沿着重力方向移动,实现车钩锁闭过程的展示(如图2) 。
3 实验教学改革成效
中南大学交通运输大类专业开设车辆工程课程,其中交通设备与控制工程专业《轨道车辆》作为专业核心课程,运用文章提出教学改革措施,经过近3年来在专业教学实践中,取得了显著成效。首先,从课程考试结果上,总体平均分不断提高,另外优秀等级(90分以上) 和良好等级(80~89分) 人数比例逐步提高,低分段(60~69分) 和不及格(60分以下) 人数比例逐渐减少。
与此同时,通过参与虚拟仿真实验,学生对学科和专业知识的掌握进一步加深,学生参与专业竞赛的积极性不断提高。近3年来学生在大学生交通科技大赛上取得的成绩不断提高,多次获得国家一等奖,其中2023 年的一等奖作品《一种新型轨道列车协调组合式时序吸能装置》即是学生在参与虚拟仿真实验时获得的启发,并利用虚拟仿真的形式完成了相关装置的设计。
通过学生的总体反馈、督导听课点评和同行交流等,课程的实验教学改革获得了一致的好评。其中,有了虚拟仿真实验辅助课堂教学,使老师的讲解和学生的学习变得更轻松;老师在课堂中可以更直观地对相关结构和工作原理进行解释说明,学生通过观察或者观看相关的模型对教学内容有更深刻的认识。通过学生参与模型的设计和优化,提高了学生课堂以及课后对该课程的参与度,使学生整合所学的知识并充分发挥创新能力,加深了对产品设计的理解。实验课堂的教学气氛更活跃,学生参与度更高,课程的教学目标也得到一定的提升。
4 结束语
实验教学一直是高等学校教育体系的重要组成部分。通过实验教学,可以培养学生的创新思维、实践能力以及分析和解决问题的能力。与此同时,为了更好地满足当前国家对高素质、具有创新思维的人才培养的需求,我们不断努力改进和拓展实验教学的方法和内容。为了满足现阶段国家对于高素质人才的培养,实验教学逐渐成为高等学校教育体系的重要组成,借助实验教学培养学生的创新思维、实践能力、分析解决问题的能力。特别地,近些年国家对于人才素质的要求逐渐增高,实验教学内容的重点逐渐向综合型和设计型改变,特别是通过引进虚拟实验,以实现实验教学变革。
在线上课程的实验中,学生可以依据个人学习能力安排学习内容,并根据个人学习能力自主安排实验进度,促使学生自主学习的范围不断扩展,学生在学习过程中的主体地位显著提高;且通过虚拟仿真实验既能够锻炼学生的独立自主学习能力,同时也能锻炼多人协同学习能力。然而,要充分实现以上提及的新型实验教学模式的前提是具备数量和质量并存的虚拟实验。但是目前,虚拟实验的开发和设计仍然存在技术问题。如何才能设计开发出内容科学、实时和交互功能强、参数变更灵活的虚拟实验,是当前虚拟实验教学中亟待解决的一个问题。
参考文献:
[1] 陈双喜.基于数字孪生的轨道车辆动力学实践教学探索[J].
[2] 石晓玲,王向玲,王晓蕾,等.虚拟仿真在轨道车辆强度课程
[3] 李晓鹏,张嘉鹭,张林.基于虚拟仿真技术的轨道交通专业实验教学资源建设研究[J].科技风,2022(18):144-146,153.
[4] 孟亚东.轨道车辆结构与原理[M].北京:清华大学出版社,2019.
[5] 严隽耄,傅茂海.车辆工程[M].3版.北京:中国铁道出版社,2008.
[6] 甘志梅,高伟,魏志祥,等.基于Unity3D的汽车起动机虚拟拆装实训系统开发[J].安阳工学院学报,2023,22(2):48-51,63.
[7] 陈业航, 夏腾辉.基于Unity3D的数控车床拆装虚拟仿真实验课程探究[J]. 教育观察, 2023, 12(4):78-81.
[8] 阚研.基于Unity3D的测控类虚拟仿真实验技术研究[D].武汉:华中科技大学,2019.
【通联编辑:王 力】
基金项目:教育部产学合作协同育人项目(项目编号:220602772242133) ;中南大学学位与研究生教育教学改革研究项目
猜你喜欢
中国科技纵横(2017年3期)2017-03-29 12:02:14
山东工业技术(2017年6期)2017-03-28 19:31:51
都市家教·下半月(2016年11期)2016-12-29 17:53:11
教育教学论坛(2016年46期)2016-12-19 21:04:03
电脑知识与技术(2016年26期)2016-11-24 16:24:32
考试周刊(2016年79期)2016-10-13 22:17:05
考试周刊(2016年77期)2016-10-09 11:49:00
考试周刊(2016年76期)2016-10-09 09:18:59
成才之路(2016年26期)2016-10-08 11:13:47
企业文化·中旬刊(2016年5期)2016-05-16 18:31:51
