抓料机属具触底自动提升系统及智能控制技术研究
2025-03-04 00:00:00王学兰杜金山马谦
工程机械与维修 2025年1期
关键词:智能控制

摘要:根据现有抓料机在抓取散装物料时因属具触底而造成属具和相关器物损坏问题,在分析抓料机结构特点基础上,设计一种抓料机属具触底自动提升系统和属具触底自动提升智能控制技术,有效解决了抓料机在抓料过程中属具触底问题。
关键词:抓料机;属具触底;自动提升;智能控制
0" "引言
现有的抓料机在抓取散装物料时,当被抓取的物料靠近货船料仓、火车及卡车等运输工具的货厢底板时,抓料属具很容易与底板碰撞,存在抓破底板的风险。尤其是在货船卸货时,如果抓破船体底部,会造成更大的损失和风险。
为了在抓料的同时不抓破底板,需要操作人员时刻调整抓料属具的高度以及闭合程度,这对操作人员的操作水平要求很高。在需要反复进行抓料的情况下,操作人员的劳动强度很高。抓料时属具是否触底,需要由操作人员通过目视或根据经验来进行判断,存在操作人员判断错误的问题。
基于此,需要设计一种属具触底自动提升系统,用以解决在抓料的过程中,属具已经触底或者卡滞,且不需人为提升属具的情况下,自动解决属具提升问题。
1" "抓料机结构
抓料机主要结构由属具18、动臂19、斗杆20、底盘21、回转平台22、驾驶室23等组成,其中抓料机构主要由属具18、动臂19、斗杆20组成,抓料机结构示意如图1所示。
动臂19的下端铰接在回转平台22上,动臂19的上端与斗杆20上端铰接,动臂19与回转平台22之间设有动臂缸,斗杆20的下端与属具18铰接,斗杆20与动臂19之间安装有斗杆缸,属具18上安装有属具缸。
使用属具时,动臂缸控制动臂19的升降,斗杆缸控制斗杆20的前伸和回收,属具缸控制属具18的打开和闭合。常用的属具有莲花爪、贝壳斗等。驾驶室23一般选用升降驾驶室,以方便查看和操纵属具作业。
2" "属具触底自动提升系统组成及工作原理
2.1" "属具触底自动提升系统组成
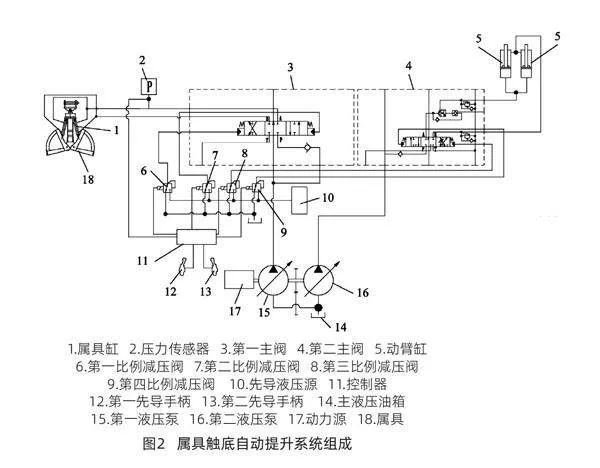
属具触底自动提升系统主要由属具缸1、压力传感器2、第一主阀3、第二主阀4、动臂缸5、第一比例减压阀6、第二比例减压阀7、第三比例减压阀8、第四比例减压阀9、先导液压源10、控制器11、第一先导手柄12、第二先导手柄13、主液压油箱14、第一液压泵15、第二液压泵16、动力源17、属具18组成,如图2所示。
2.2" "属具触底自动提升系统工作原理
第一比例减压阀6、第二比例减压阀7分别与第一主阀3的两侧相连接,用于驱动第一主阀3的阀芯移动,第三比例减压阀8、第四比例减压阀9分别与第二主阀4的两侧相连接,分别用于驱动第二主阀4的阀芯移动。
控制器11分别与第一比例减压阀6、第二比例减压阀7、第三比例减压阀8、第四比例减压阀9以及压力传感器2通信连接。先导液压源10分别与第一比例减压阀6、第二比例减压阀7、第三比例减压阀8以及第四比例减压阀9相连接。
当第二比例减压阀7输出先导压力油驱动第一主阀3的阀芯右位工作时,使得属具缸1的无杆腔进油、有杆腔回油,属具18执行抓料动作;当第一比例减压阀6输出先导压力油驱动第一主阀3的阀芯左位工作时,使得属具缸1的有杆腔进油,无杆腔回油,属具18取消抓料动作。
压力传感器2设置于属具缸1和主阀3之间的进油油路上,用于采集属具缸1无杆腔工作时的油压。控制器11根据检测到的压力传感器2的压力信号和第二比例减压阀7对第一主阀3有无输出先导压力信号,判断属具18的工作状态,即是否执行抓料动作。
当第四比例减压阀9输出先导压力油驱动第二主阀4的阀芯左位工作时,使得动臂缸5的无杆腔进油、有杆腔回油,实现举升动作;当第三比例减压阀8输出先导压力油驱动第二主阀4的阀芯右位工作时,使得动臂缸5的有杆腔进油、无杆腔回油,实现回收动作。
第二先导手柄13与控制器11通信连接,操作者通过第二先导手柄13向控制器11发出第三比例减压阀8和第四比例减压阀9的动作指令,即第二先导手柄13通过控制器11控制动臂19动作,因此控制器11通过检测第二先导手柄13的信号,即可判断动臂19是否正在上下动作。
第一先导手柄12与控制器11通信连接,操作者通过第一先导手柄12向控制器11发出第一比例减压阀6和第二比例减压阀7的动作指令,即第一先导手柄12通过控制器11控制属具18动作,因此控制器11通过检测第一先导手柄12的信号,即可判断属具18是否正在抓取物料。
3" "属具触底自动提升智能控制技术
当控制器11检测到压力传感器2的压力信号高于预设压力值、且控制器11检测到第二比例减压阀7对第一主阀3有输出先导压力信号时,说明属具18在进行抓料操作,同时利用控制器11对第一先导手柄12上的信号进行检测。
若检测到有先导压力信号时,说明已人为控制动臂19提升。由于设定人为操作优先,那么此时控制器11不主动控制动臂提升。若控制器11检测到无先导压力信号时,说明无人为控制动臂提升,则控制器11向第四比例减压阀9输入一个电信号,第四比例减压阀9输出先导压力油,推动第二主阀4的阀芯移动,使得动臂19按预设时间提升,以脱离工作面。
当控制器11检测到压力传感器2的压力信号高于预设压力值,且控制器11检测到第二比例减压阀7对第一主阀3无输出先导压力信号时,说明属具18已抓取有物料,并且此时不再继续进行抓料操作,同时利用控制器11对第一先导手柄12上的信号进行检测。
若控制器11检测到有输出先导压力信号时,说明已经人为控制动臂提升,由于设定人为操作优先,控制器不主动控制动臂19提升;若控制器11检测到无输出先导压力信号,说明动臂19无动作,则判定属具处于悬停状态,此时作为干扰项,控制器11不主动控制动臂提升。
4" "结束语
本文针对现有抓料机在抓料过程中存在属具触底问题,提出了一个解决方案,结合电器元件强大功能对液压系统进行智能控制。
在属具触底且无人为对动臂提升情况下,通过控制器主动控制使得动臂按预设时间提升,进而使属具底端脱离工作面。本文通过工程机械的智能化控制有效解决了抓料机在抓料过程中属具触底问题,具有较高的推广应用价值。
猜你喜欢
卷宗(2016年10期)2017-01-21 15:33:38
山东工业技术(2016年23期)2016-12-23 17:23:43
山东工业技术(2016年23期)2016-12-23 17:21:06
科技创新与应用(2016年34期)2016-12-23 16:04:06
科技创新与应用(2016年34期)2016-12-23 09:52:55
电子技术与软件工程(2016年20期)2016-12-21 11:36:49
电子技术与软件工程(2016年20期)2016-12-21 11:00:56
计算机教育(2016年10期)2016-12-19 12:15:52
求知导刊(2016年30期)2016-12-03 10:39:52
演艺科技(2016年10期)2016-11-26 22:11:21