
基于自适应混合策略鲸鱼优化算法的分数阶PID控制器在液位控制中的研究
2025-02-26 00:00:00陆琦张艳丽李新华王明超
化工自动化及仪表 2025年1期




摘 要 为了进一步提高液位控制系统的控制精度和稳定性,采用分数阶PID控制器(FOPID)对液位进行控制。由于分数阶PID控制器存在整定参数多、整定困难等问题,提出了一种自适应混合策略鲸鱼优化算法(AMSWOA)对分数阶PID参数进行整定。采用实验用单容和双容水箱模拟工业中的液位控制。利用MATLAB工具对分数阶PID控制器和液位控制系统进行仿真建模,并与整数阶PID控制算法进行仿真比较。结果表明,与整数阶PID控制器相比,应用自适应混合策略鲸鱼优化算法的分数阶PID控制器具有超调量小、调节时间短及稳态误差小等优势。
关键词 液位控制 分数阶PID控制 自适应混合策略鲸鱼优化算法 仿真建模
中图分类号 TP391.9"" 文献标志码 A"" 文章编号 1000 3932(2025)01 0016 06
在工业过程控制中,通常依靠人工经验和经验公式设定PID控制器参数来实现液位控制,从而达到预期的质量和产品安全水平,并使过程更加经济[1]。但这种方法往往难以达到期望的控制效果,随着计算机技术的不断进步和液位控制精度的提高,国内外学者对液位控制进行了深入的研究,提出了一些新的控制方法。OMID S和AMIR T针对核蒸汽发生器的液位控制,通过粒子群优化(PSO)和遗传算法(GA)对PID控制器参数进行整定[2],整定后稳态误差、超调量均较小,稳定时间较短。GAO H等针对连铸机中的模具液位控制系统,提出基于人工鱼群优化算法的PID来调节模具液位[3]。与传统PID控制器相比,利用人工鱼群优化算法的PID控制其液位曲线波动明显减少,系统鲁棒性得到增强,进一步提高了连铸机模具液位控制的质量。ELHOSSEINI M A等针对热回收蒸汽发生器中的液位控制,提出人工蜂群优化(ABC)算法的分数阶PID(Fractional Order Proportional Integral Derivative,FOPID)控制器[4],液位控制效果良好,但由于其数学计算复杂,不能很好地应用于工业实践中。
学者们将优化算法与PID控制器进行结合,以提高PID控制器的控制性能。同时,一些学者将分数阶PID控制器应用在液位控制中,这种方法在液位控制中的应用可以有效提高控制效果和系统稳定性。为了进一步提高液位控制性能,笔者设计了一种自适应混合策略鲸鱼优化算法(Adaptive Mixed Strategy Whale Optimization Algorithm,AMSWOA)的分数阶PID控制器。利用实验用水箱做液位特性实验分别得到单容、双容水箱传递函数,在MATLAB/Simulink环境下搭建智能控制器和液位控制系统仿真模型,并与整数阶PID控制算法进行比较,由此实现单容、双容水箱液位系统控制器的设计及液位的控制。
1 自适应混合策略鲸鱼优化算法的分数阶PID控制器设计
1.1 分数阶PID控制器
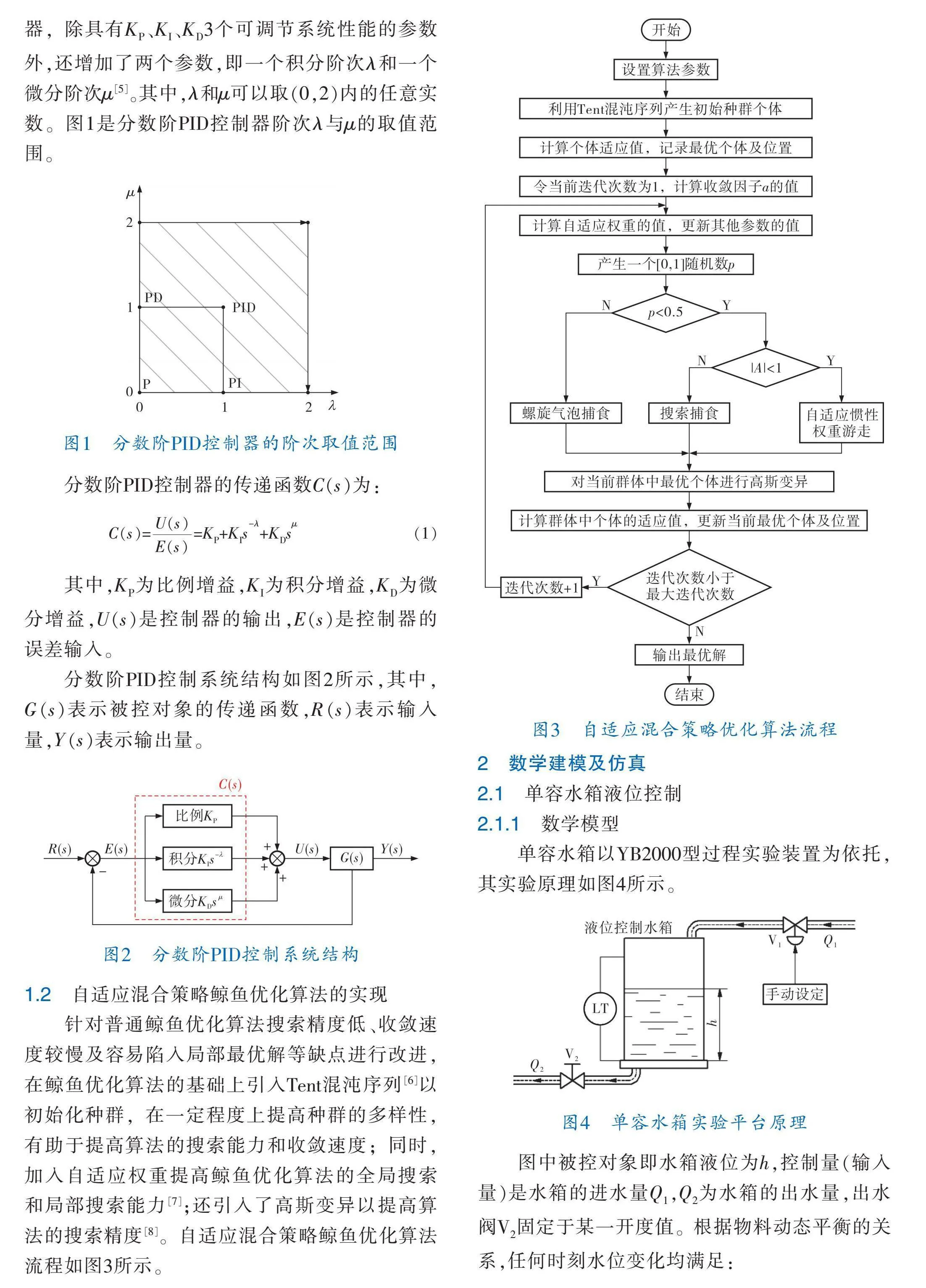
分数阶PID控制器相较于整数阶PID控制器,除具有K、K、K3个可调节系统性能的参数外,还增加了两个参数,即一个积分阶次λ和一个微分阶次μ[5]。其中,λ和μ可以取(0,2)内的任意实数。图1是分数阶PID控制器阶次λ与μ的取值范围。
分数阶PID控制器的传递函数C(s)为:
C(s)==K+Ks+Ks" (1)
其中,K为比例增益,K为积分增益,K为微分增益,U(s)是控制器的输出,E(s)是控制器的误差输入。
分数阶PID控制系统结构如图2所示,其中,
G(s)表示被控对象的传递函数,R(s)表示输入量,Y(s)表示输出量。
1.2 自适应混合策略鲸鱼优化算法的实现
针对普通鲸鱼优化算法搜索精度低、收敛速度较慢及容易陷入局部最优解等缺点进行改进,在鲸鱼优化算法的基础上引入Tent混沌序列[6]以初始化种群,在一定程度上提高种群的多样性,有助于提高算法的搜索能力和收敛速度;同时,加入自适应权重提高鲸鱼优化算法的全局搜索和局部搜索能力[7];还引入了高斯变异以提高算法的搜索精度[8]。自适应混合策略鲸鱼优化算法流程如图3所示。
2 数学建模及仿真
2.1 单容水箱液位控制
2.1.1 数学模型
单容水箱以YB2000型过程实验装置为依托,其实验原理如图4所示。
图中被控对象即水箱液位为h,控制量(输入量)是水箱的进水量Q,Q为水箱的出水量,出水阀V固定于某一开度值。根据物料动态平衡的关系,任何时刻水位变化均满足:
Q-Q=0(2)
其中,Q为稳态时水箱进水量,Q为稳态时水箱出水量。
动态时,则有:
Q-Q=(3)
其中,V为水箱的贮水容积,dV/dt为水贮存量的变化率,它与h的关系为dV=Adh,即:
=A(4)
其中,A为水箱的底面积。
由式(3)、(4)得:
Q-Q=A(5)
基于Q=h/R,R为阀门V的液阻,则式(5)可以改写为:
Q-=A(6)
即:
=(7)
其中,T为过程的时间常数,T=AR,它与水箱的底面积A和阀门V的液阻R有关;K为过程的放大系数,K=R。式(7)为单容水箱的传递函数。令Q=R/s,R为常量,则式(7)可改为:
H(s)=×=K-(8)
对式(8)求拉氏变换,得:
h(t)=KR(1-e)(9)
当t=∞时,有:
K=h(∞)/R=输出稳态值/阶跃输入(10)
当t=T时,有:
h(t)=KR(1-e)=0.632KR=0.632h(∞)(11)
式(9)表示一阶惯性环节的阶跃响应曲线是单调上升的指数函数。因为大多工业控制都带有一定的滞后,设纯滞后时间为τ,所以单容水箱的数学模型表示为:
=e(12)
依据实验数据,已知输出稳态值h(∞)=39.5366,阶跃输入R=20,根据式(10)解得K=1.9768。根据单容水箱液位数学建模实验原理,时间常数T是该曲线到稳态值时间的63%处的时间,由于0.632h(∞)=24.9871,因此T的值为1 207 s。由于单容水箱液位特性实验响应有60 s的滞后时间,因此得到被控对象水箱的传递函数:
G(s)=e(13)
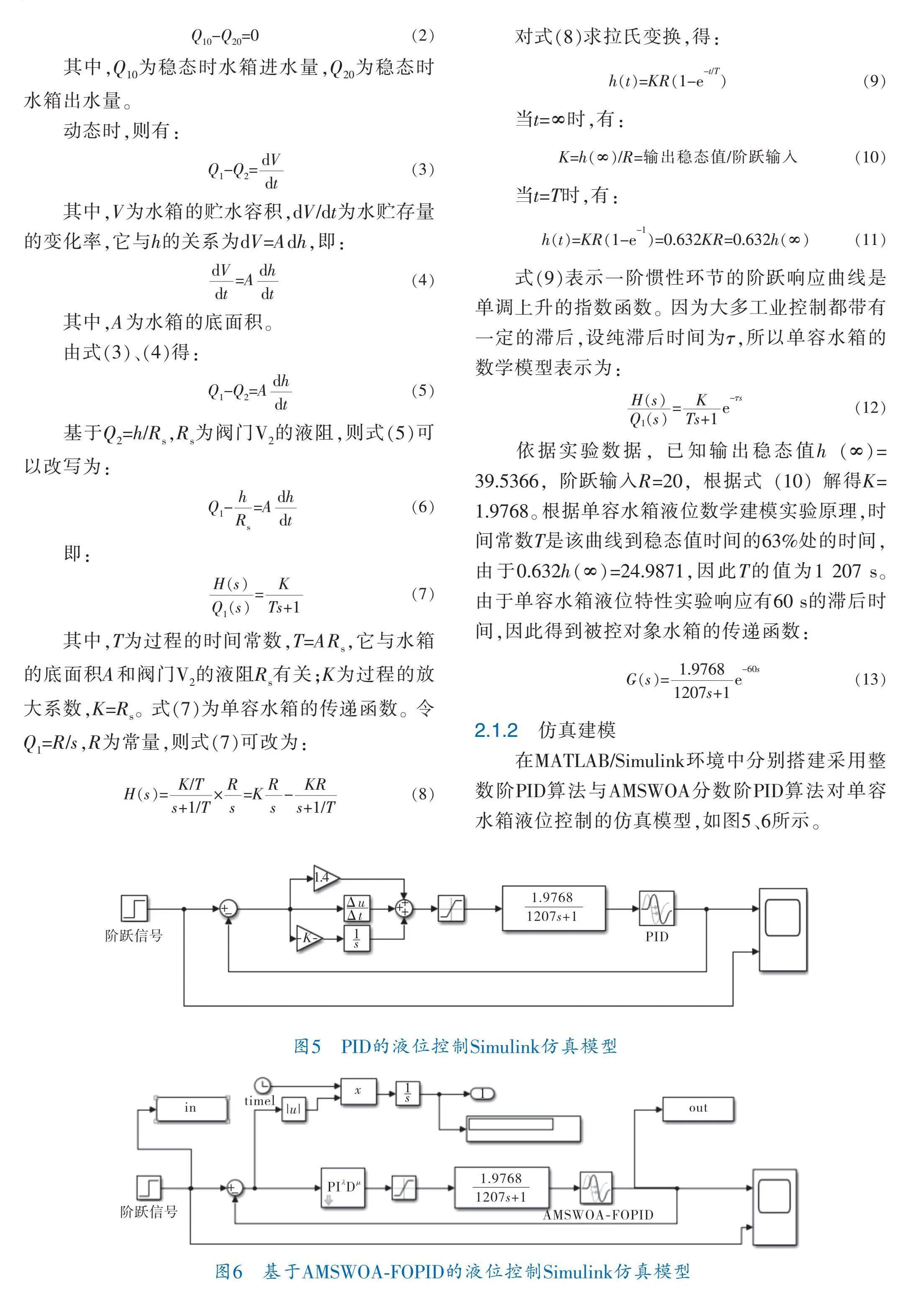
2.1.2 仿真建模
在MATLAB/Simulink环境中分别搭建采用整数阶PID算法与AMSWOA分数阶PID算法对单容水箱液位控制的仿真模型,如图5、6所示。
2.1.3 仿真结果分析
由于算法在优化过程中存在一定的随机性,多次运行算法程序,选取最优运行效果。在进行仿真实验前,需要对相关参数进行设置,整数阶PID控制器采用Z N法对控制器参数进行整定;AMSWOA算法有关参数设置为鲸鱼规模50,算法迭代最大值10,收敛因子a的初始值(a)为2,a的终止值(a)为1,非线性调节系数m为0.1。其他参数随机初始化,通过分析多次实验结果发现,当整定参数的取值范围KP∈[0,10],K∈[0,10],K∈[0,10],λ、μ∈[0,2]时控制效果良好。相应的控制参数设置完之后,点击运行按钮程序自动运行进行对比实验,两种控制算法对单容水箱液位控制的效果如图7、8所示。
结果表明,相较于整数阶PID控制器,笔者设计的AMSWOA FOPID方法对单容水箱液位控制具有上升时间短、超调量小、稳态误差小与调节时间短的优势。
2.2 双容水箱液位控制
双容水箱液位系统与工业生产中的被控对象具有相似的耦合性、滞后性及非线性等特性。笔者采用AE2000过程控制实验装置进行双容水箱液位控制的研究。
2.2.1 数学模型
双容水箱液位实验原理如图9所示,其中被
控对象为下水箱,其液位为h,控制量(输入量)是水箱的进水量Q,Q既是水箱1中流出的流量又是水箱2中流入的流量,Q是水箱2中流出的流量,阀门V、V和V固定于某一开度值。
根据物料动态平衡的关系,并考虑到液体传输过程中的时延,其传递函数为:
=G(s)=e(14)
其中,T、T分别为两个水箱的时间常数;K为过程放大系数,K的计算方法与单容水箱液位的确定方法相同:
K=h(∞)/R(15)
利用近似公式计算参数T和T:
t=0.4h(∞)(16)
t=0.8h(∞)(17)
T+T≈(18)
≈1.74-0.55(19)
由于双容水箱液位特性实验响应有10 s的滞后时间,得到被控对象水箱的传递函数:
G(s)=e "(20)
2.2.2 仿真建模
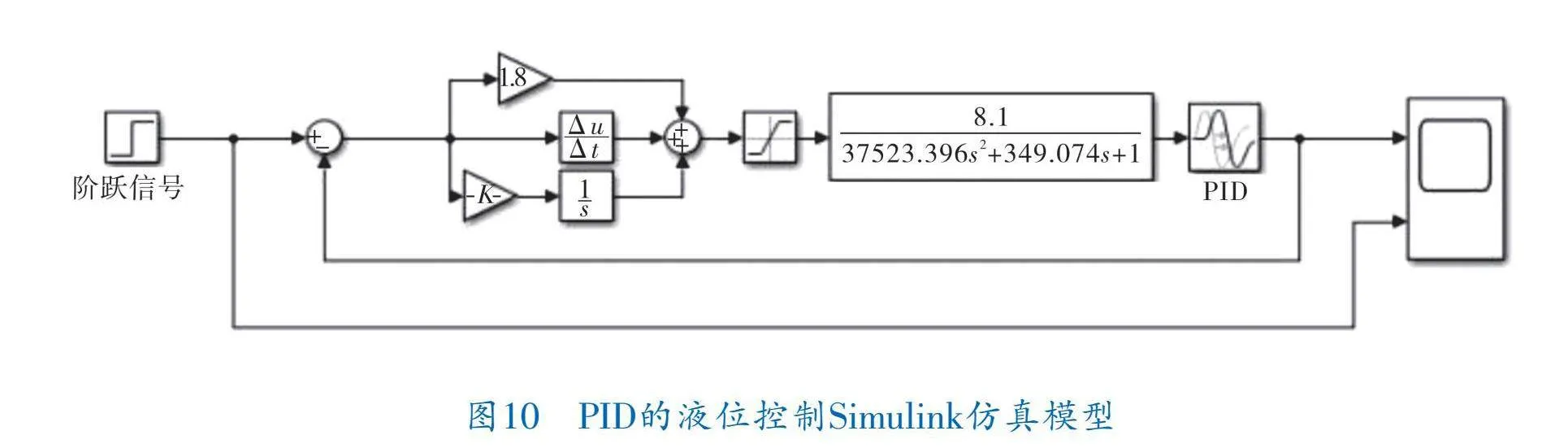
在MATLAB/Simulink环境中分别搭建采用整数阶PID算法与AMSWOA分数阶PID算法对双容水箱液位控制的仿真模型,如图10、11所示。
2.2.3 仿真结果分析
对相应的控制参数进行设置后,两种控制算法对双容水箱液位控制的控制效果如图12、13所示。
由图12可以看出,PID控制曲线的超调量要大于AMSWOA FOPID控制曲线的;调节时间上,AMSWOA FOPID控制曲线明显优于PID控制曲线;上升时间上,PID控制曲线与AMSWOA FOPID控制曲线相差不多。
由图13可以看出,采用整数阶PID控制器的控制误差变化波动大,而使用AMSWOA FOPID进行控制,误差变化相对平缓。
3 结束语
利用实验平台做水箱液位特性实验,分别得到YB2000过程控制实验装置的单容水箱传递函数与AE2000过程控制实验装置的双容水箱传递函数;然后,分别将笔者提出的AMSWOA FOPID控制器与整数阶PID控制器应用在单容水箱与双容水箱液位控制上进行仿真实验,经分析分析得到AMSWOA FOPID控制的液位曲线在超调量、调节时间与稳态误差上都优于整数阶PID控制的,液位控制性能得到较大的提升。文中的研究将对工业生产中的液位过程控制研究起到参考和指导作用。
参 考 文 献
[1] YAHYA S,JADMIKO S W,WIJAYANTO K,et al.Design and implementation of training module for control liquid level on tank using PID method based PLC[J].IOP Conference Series:Materials Science and Engineering,2020,830(3):032065.
[2]" OMID S,AMIR T.Optimization of PID controller for water level control of the nuclear steam generator using PSO and GA[J].Kerntechnik,2022,87(5):597-606.
[3]" GAO H,HAO P,LIU S.Application of Artificial Fish Swarm PID in Mold Level Control of Continuous Casting Machine[C]//2020 5th International Conference on Mechanical,Control and Computer Engineering(ICMCCE).Piscataway,NJ:IEEE,2020:592-596.
[4]"" ELHOSSEINI M A,SHAMS EL DIN A,ALI H A,et al.Heat recovery steam generator (HRSG) three element drum level control utilizing Fractional order PID and fuzzy controllers[J].ISA Transactions,2022,122(1):281-293.
[5]"" PODLUBNY I.Fractional order system and PID contro
llers[J].IEEE Transactions on Automatic Control,1999,44(1):208-214.
[6]"" XIAO L.Parameter tuning of PID controller for beer filling machine liquid level control based on improved genetic algorithm[J].Computational Intelligence and Neuroscience,2021(1):1-10.
[7]"" ZHANG J,WANG J S.Improved Whale Optimization Algorithm Based on Nonlinear Adaptive Weight and Golden Sine Operator[J].IEEE Access,2020,8:77013-77048.
[8]"" ROSENTHAL K I.Quantales and their applications[M].London:Longman Scientific and Technical,1990.
(收稿日期:2024-01-11,修回日期:2024-12-10)
The Fractional Order PID Controller for Liquid Level Control Based on Adaptive Mixed Strategy Whale Optimization Algorithm
LU Qi1, ZHANG Yan li2, LI Xin hua2, WANG Ming chao1
(1. Dandong Dongfang Measurement and Control Technology Co., Ltd.;
2. Panjin Institute of Industrial Technology, Dalian University of Technology)
Abstract"" With a view to improving the control accuracy and stability of the liquid level control system, the fractional order proportional integral derivative(FOPID) controller was applied there. Considering the FOPID’s many adjustment parameters and its difficulty to adjust, the adaptive mixed strategy whale optimization algorithm(AMSWOA)was proposed for FOPID parameter tuning. In the experiment, both single and double tanks were adopted to simulate the liquid level control in the industry, including having the Matlab tool employed to simulate and model both FOPID controller and liquid level control system, and then having it compared with the integer order PID controller in simulation. The simulation and experimental results show that, the FOPID controller based on AMSWOA, as compared to integral order PID controller, boasts small overshoot, quick adjustment time and low steady state error.
Key words"" liquid level control, FOPID control, AMSWOA, simulation modeling
猜你喜欢
幼儿100(2022年41期)2022-11-24 03:20:20
数学大王·趣味逻辑(2020年9期)2020-09-06 14:17:17
小天使·二年级语数英综合(2019年4期)2019-10-06 02:44:36
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
动漫星空(2018年4期)2018-10-26 02:11:54
电子制作(2017年19期)2017-02-02 07:08:50
工业设计(2016年11期)2016-04-16 02:49:22
小雪花·成长指南(2015年10期)2015-10-23 08:37:37
汽车维护与修理(2015年2期)2015-02-28 12:15:41
