
应用类人型机器人提升幼儿同伴交往的问题解决能力:基于教育实验的研究
2025-02-20 00:00:00刘友棚洪秀敏
电化教育研究 2025年2期
关键词:人工智能教育


[摘" "要] 从小掌握同伴交往的问题解决能力,对个体未来工作与生活质量具有深远影响。在人工智能技术持续迭代发展的当下,关于类人型机器人辅助教育对幼儿同伴交往的问题解决能力的影响成效有待探索。研究从幼儿园中选择70名4~5岁的幼儿作为干预对象,组成实验组1(n=27)、实验组2(n=20)和控制组(n=23),采用教育实验法探究了类人型机器人对幼儿同伴交往的问题解决能力的影响。结果发现,类人型机器人对幼儿同伴交往的问题解决能力整体影响成效显著,对同伴问题归因、多元方法生成、行为策略决策的促进作用明显,但未能提升幼儿的行为结果预测技能。研究对类人型机器人有效提升幼儿同伴交往的问题解决能力的作用机理进行了讨论,构建了由“具身性互动”“教学性互动”“社交性互动”组成的类人型机器人辅助教育教学的三维保障,分析了类人型机器人在干预提升诸如行为结果预测这类复杂性社会技能上的自限性。研究结论有助于为开展基于类人型机器人的教育教学实践提供科学指导。
[关键词] 类人型机器人; 人工智能教育; 同伴交往的问题解决能力; 幼儿社会性; 教育干预
[中图分类号] G434" " " " " " [文献标志码] A
一、问题的提出
同伴交往的问题解决能力(Peer Interactional Problem-Solving Skill)是指幼儿解决同伴交往问题的内在认知技能,包括同伴问题归因、行为结果预测、多元方法生成、行为策略决策四个维度。在幼儿时期掌握同伴交往的问题解决能力的人,未来面临学校、工作、家庭环境中的人际冲突时,能够最大限度地实现双方互利,维持良好的人际关系[1]。相反,在同伴问题解决上存在不足的幼儿,未来可能会遭遇学校、生活失败的风险,如学业困难、社交拒绝[2-3]。幼儿同伴交往的问题解决能力并非天生,而需后天教育的加持。为此,学术界多基于教育干预研究范式探讨提升儿童同伴交往的问题解决能力的适宜路径[4-5]。随着人工智能的迭代发展,以类人型机器人(Humanoid Robot)为代表的智能技术逐渐被应用于儿童教育干预研究中。类人型机器人指的是一种在现实环境中基于“以人为本”的方式与人类共同互动的实体化机器人,它能通过面部表情、身体和头部运动、语音交流等与儿童进行互动。研究发现,类人型机器人通过故事讲读、对话引导等方式提升了儿童的情绪理解、社会性模仿技能[6-7];相比其他学段,机器人对于学前儿童的促进效应最大[8];相比于非认知技能,机器人对儿童认知技能的影响成效更大[9];在实施低龄儿童启蒙教育上,机器人具有合用性、可用性[10-11]。可见,应用类人型机器人辅助教育干预来提升幼儿同伴交往的问题解决能力,是优化传统教育干预范式的一种新尝试。本研究选择类人型机器人作为实施教育干预的辅助性工具,采用教育实验法探究类人型机器人辅助的教育干预模式对幼儿同伴交往的问题解决能力的影响,以检验类人型机器人在幼儿教育干预方面的价值,为高质量提升幼儿同伴交往的问题解决能力提供新的教育方法。
二、研究过程与方法
(一)研究被试
以4~5岁幼儿为干预对象。在一所普惠公立幼儿园抽取了三个中班,分别组成实验组1(n=27,女童12名)、实验组2(n=20,女童11名)和控制组(n=23,女童11名)。所有幼儿身心发育正常。为检验组别同质性,在实验开始之前,对三组幼儿实施同伴交往的问题解决能力的前测。方差分析显示,三组基线水平在统计学上是一致的(F总分=1.115,p=0.334gt;0.05;F同伴问题归因=0.327,p=0.726gt;0.05;F行为结果预测=2.818,p=0.604gt;0.05;F多元方法生成=2.818,p=0.067gt;0.05;F行为策略决策=0.752,p=0.475gt;0.05),表明三组具有同质性。
(二)实验设计
采用教育实验法,通过实验组、控制组前后测设计,探究类人型机器人对幼儿同伴交往的问题解决能力的影响。实验组1为“教师使用机器人”干预模式,即:教师将类人型机器人作为教育干预的辅助工具,干预活动由类人型机器人实施,教师在旁引导幼儿与类人型机器人互动。实验组2为“教师单独实施”干预模式,即:干预活动由人类教师单独完成,无类人型机器人辅助,该组幼儿接受人类教师实施的干预活动。实验组1和2之间,除有无配置类人型机器人,所有干预内容、干预材料、组织模式、干预时间等是一致的。控制组不接受任何干预。
(三)实验材料
材料一,类人型机器人。选择“悟空机器人”作为干预活动的实验材料,理由是:一是社交互动优势。“悟空机器人”支持语音互动、人脸识别、面部情绪表达等,具备较良好的社交功能。例如,它能发出“你好”“谢谢”“不客气”等语音,并做出“拥抱”“鞠躬”“点赞”等动作;其面部能做出高兴、伤心、忧伤、惊讶、苦恼等46组表情。二是情境演绎优势。“悟空机器人”具备情境故事讲演功能,在编程的支持下能通过语音与动作相协调的方式演绎情境故事。三是图形化编程功能。用户可使用机器人自带的图形化编程功能实现对机器人事件、动作、语音等的控制。
材料二,情境图画。选择关于幼儿同伴交往主题的若干情境图画作为类人型机器人辅助教育干预的关键材料。情境图画的选择具有一定程序:首先,检索相关图画书。以幼儿同伴交往为主题,初步选择了25本图画书,并筛选出其中的14本①。邀请11位学前教育专业人员分别对14本图画书的年龄适宜性、儿童经验性、文化适宜性、教育干预契合度进行五点评分。结果发现,14本图画书在以上四个方面的平均得分介于4.52~4.71,表明所选图画书具有针对性。其次,确定情境图画。根据干预需要,从14本图画书中选择23个情境片段。其中,关于社交中的情绪感受及其处理方法的情境片段2个、关于同伴间换位思考的情境片段1个、关于发起交往的情境片段6个、关于维持交往的情境片段6个、关于同伴冲突的情境片段6个、关于同伴问题的建设性和消极性解决策略的情境片段2个。
(四)研究工具
自主研制《幼儿同伴交往的问题解决能力评估工具》,并将其作为教育干预的前、后测工具。整套工具内嵌4个维度,即同伴问题归因、行为结果预测、多元方法生成、行为策略决策。每个维度由3个项目来衡量,共12个项目。所研制的评估工具具有良好的区分度和信效度。12个项目与评估总分均存在显著正相关,相关系数介于0.537~0.728;内部一致性系数为0.857;评分者信度达0.911。评估工具的实施以iPad为载体,采用“一对一”的方式,借助iPad为幼儿呈现和解读情境照片并提问题,幼儿以语音方式回答问题,以此完成评估。
(五)实验程序
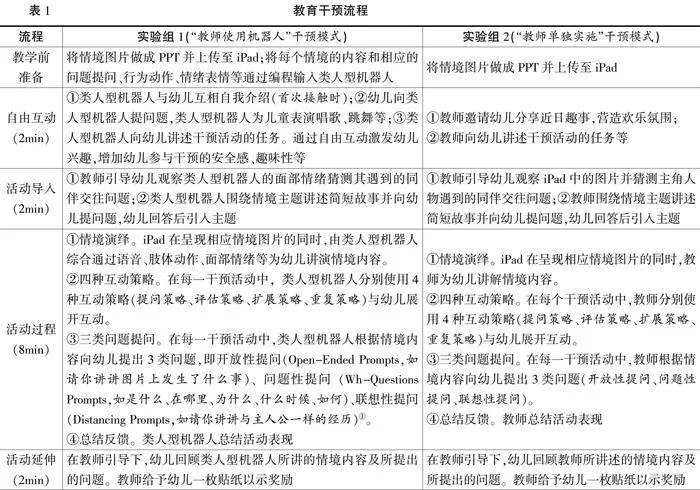
鉴于学前阶段儿童的身心发展特征,本研究以“小组”作为干预活动的组织模式。在每次干预活动中,实验组1中的每一小组由1台类人型机器人、3~4名幼儿和1名教师组成,实验组2中的每一小组由1名教师和3~4名幼儿组成。实验组1、实验组2的幼儿每周参与干预活动1~2次,每次14~16分钟,持续8周,共参与活动10次。控制组不接受任何干预,干预流程见表1。
(六)数据统计
采用IBM SPSS Statistics 23软件对相关数据进行了描述性统计、t检验、方差分析等统计分析。
三、结果与分析
(一)类人型机器人对幼儿同伴交往的问题解决能力的整体影响
关于实验组1(“教师使用机器人”干预模式)、实验组2(“教师单独实施”干预模式)和控制组同伴交往的问题解决能力的前、后测总分及其差值(即后测总分与前测总分之差),见表2。
1. 不同组别前测与后测总分的差异分析
分别对实验组1、2及控制组同伴交往的问题解决能力前测总分、后测总分进行配对样本t检验,结果发现,实验组1的后测总分显著大于前测总分(t=10.990,plt;0.01),实验组2的后测总分显著大于前测总分(t=7.047,plt;0.01),控制组的后测总分与前测总分无显著差异(t=-1.085,p=0.290gt;0.05)。这一结果初步说明,两种干预模式对于幼儿同伴交往的问题解决能力的整体提升均具有显著正向作用。
2. 不同组别后测总分的差异分析
对不同组别同伴交往的问题解决能力后测总分进行单因素方差分析发现,不同组别后测总分存在显著差异,F(2,67)=123.597,plt;0.001,偏η2=0.787。多重比较分析发现,实验组1的后测总分显著高于其他两组(plt;0.001),实验组2的后测总分显著高于控制组(plt;0.001)。可见,尽管两种干预模式都对幼儿同伴交往的问题解决能力产生显著促进作用,但“教师使用机器人”干预模式的成效更为明显。
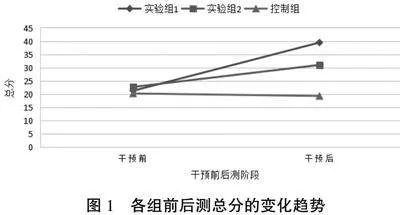
3. 不同组别前后测总分差值的差异分析
对幼儿同伴交往的问题解决能力前后测总分差值进行单因素方差分析发现,不同组别前后测总分差值存在显著差异,F(2,67)=53.824,plt;0.001,偏η2=0.616。多重比较分析发现,实验组1的前后测总分差值显著大于其他两组(plt;0.001),实验组2的前后测总分差值显著大于控制组(plt;0.001)。如图1所示,在干预期间,实验组1和实验组2的总分处于上升趋势,但实验组1的斜率明显大于实验组2,说明“教师使用机器人”干预组的幼儿,其整体进步程度更大。
(二)类人型机器人对幼儿同伴交往的问题解决能力各维度的影响
进一步对同伴交往的问题解决能力各维度的前后测得分及其差值(见表3)进行分析,探究类人型机器人对各维度的影响。
1. 不同组别“同伴问题归因”得分的差异分析
分别对三组幼儿同伴问题归因的前、后测得分进行配对样本t检验,结果发现,实验组1的后测得分显著高于前测得分(t=12.417,plt;0.001),实验组2的后测得分显著高于前测得分(t=4.425,plt;0.001),控制组的前、后测得分无显著差异(t=-0.447,p=0.660gt;0.05)。可见,“教师使用机器人”干预模式和“教师单独实施”干预模式对儿童同伴问题归因的提升均具有促进作用。对各组同伴问题归因后测得分进行单因素方差分析,结果发现,组别主效应显著,F(2,67)=68.840,plt;0.001,偏η2=0.673。多重比较分析发现,实验组1的得分显著高于其他两组(plt;0.001),实验组2的得分显著高于控制组(plt;0.001)。
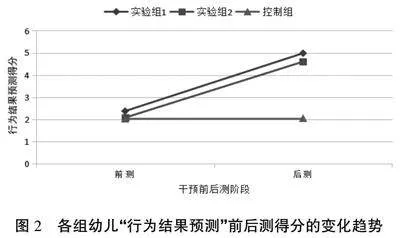
2. 不同组别“行为结果预测”得分的差异分析
分别对三组幼儿行为结果预测的前、后测得分进行配对样本t检验,结果发现,实验组1的后测得分显著高于前测(t=7.727,plt;0.001),实验组2的后测得分显著高于前测(t=5.619,plt;0.001),控制组的前、后测得分无显著差异(t=0.075,p=0.941gt;0.05),这一结果与同伴问题归因维度的结果相一致。进一步对各组幼儿行为结果预测的后测得分进行单因素方差分析,结果发现,组别主效应显著,F(2,67)=32.595,plt;0.001,偏η2=0.493。多重比较分析发现,实验组1与实验组2的得分无显著差异(pgt;0.05),但都显著高于控制组(pslt;0.001)。此外,如图2所示,实验组1、实验组2的行为结果预测得分呈现上升趋势,但两者的斜率近乎相同,这说明在行为结果预测的干预上,类人型机器人加持下的教育活动未能显示出独特优势。
3. 不同组别“多元方法生成”得分的差异分析
分别对三组幼儿多元方法生成的前、后测得分进行配对样本t检验,结果发现,实验组1的后测得分显著高于前测得分(t=12.464,plt;0.001),实验组2的后测得分显著高于前测得分(t=8.427,plt;0.001),控制组的前后测得分无显著差异(t=-0.810,p=0.426gt;0.05)。可以看出,“教师使用机器人”干预模式和“教师单独实施”干预模式对幼儿多元方法生成技能的发展均具有促进效应。进一步对各组幼儿多元方法生成的后测得分进行单因素方差分析,结果发现不同组别幼儿的多元方法生成后测得分存在显著差异,F(2,67)=113.698,plt;0.001,偏η2=0.772。多重比较分析发现,实验组1的得分显著高于其他两组(plt;0.001),实验组2的得分显著高于控制组(plt;0.001)。
4. 不同组别“行为策略决策”得分的差异分析
分别对三组幼儿行为策略决策的前、后测得分进行配对样本t检验,结果发现,实验组1的后测得分显著高于前测(t=5.251,plt;0.001),实验组2的后测得分与前测无显著差异(t=2.044,p=0.06gt;0.05),控制组的前后测得分无显著差异(t=-1.374,p=0.183gt;0.05)。可见,“教师使用机器人”干预模式对幼儿的行为策略决策具有正向的影响效应,但“教师单独实施”干预模式的作用并不明显。进一步对各组幼儿的行为策略决策后测得分进行单因素方差分析,结果发现,不同组别幼儿的行为策略决策后测得分存在显著性差异,F(2,67)=30.918,plt;0.001,偏η2=0.480。多重比较分析发现,实验组1的得分显著高于其他两组(plt;0.001),实验组2的得分显著高于控制组(plt;0.001)。
四、讨论与思考
(一) “教师使用机器人”干预模式存在整体优势,对幼儿同伴问题归因、多元方法生成、行为策略决策等技能的提升具有显著作用
本研究发现,“教师使用机器人”干预模式对幼儿同伴交往的问题解决能力的整体影响成效显著。从各维度看,参与类人型机器人辅助教育干预的幼儿,其同伴问题归因、多元方法生成和行为策略决策均获得了更为明显的改善。为什么类人型机器人辅助教育干预能够对幼儿同伴交往的问题解决能力整体产生积极影响?本研究认为,具有类人型机器人加持的教育干预具备较为明显的具身性互动、教学性互动和社交性互动,这三者构成了其独特的有效性保障。
1. “具身性互动”为幼儿习得同伴交往的问题解决能力创设身体涉入机会
具身性互动体现为幼儿与类人型机器人互动过程中的多感官参与。具身认知理论认为,身体作为真实的生物系统,其接收的信息量远大于大脑从任何环境中接收处理的信息量[12]。Fridin认为,与传统的学习模式相比,类人型机器人辅助教学强化了儿童的多感官体验[13]。Kim等人认为,机器人可被视为激发儿童使用身体进行思考和沟通的催化剂,在与机器人互动的过程中,儿童的思维与其多感官行动是完全协调的[14]。在本研究中,“悟空机器人”可爱的外表形象以及语言、动作等功能极大吸引了实验组1的幼儿,激发和维持了他们参与教育干预的兴趣、好奇心和注意力等。在干预期间,幼儿按照“悟空机器人”的讲解内容,适时用手指翻阅旁边以iPad为呈现载体的情境资料;幼儿在回答问题后需根据“悟空机器人”的指令与其握手或做出拥抱的动作;此外,幼儿在干预期间能根据“悟空机器人”的移动位置而适当改变自己的位置。总之,在与类人型机器人的互动中,幼儿能将更多的身体感官投入学习任务中。
2. “教学性互动”为幼儿习得同伴交往的问题解决能力提供认知支持
教学性互动体现在类人型机器人的多元化教学技巧。Caruana等人认为,在机器人的教育活动中,儿童的意义构建受益于机器人对各种信息的协调性表达[15]。机器人能否对教学内容中的信息进行综合性的表达,直接影响幼儿对信息的加工水平。这就好比人类教师在向幼儿讲解某一事物时,相比于仅采用语音讲解的教师,那些综合运用语音、躯体动作、实物展示等手段的教师往往能帮助幼儿完成系统性的意义构建。在教育干预中,我们强调了“悟空机器人”在信息表达上的综合性表现,通过编程促使“悟空机器人”围绕同伴交往情境,结合语音、肢体动作、面部表情以及图片等共同传递关键信息,这无疑提高了幼儿对同伴交往情境信息的理解,促使儿童正确思考同伴交往问题的方法、原因以及策略决策等内容。此外,De Haas等人的研究发现,相比于中性反馈和消极性反馈,机器人的积极性反馈有助于提升儿童的学习收益[16]。在本研究中,我们对“悟空机器人”的反馈进行了多形式的编程,促使“悟空机器人”在幼儿回答问题后即时通过语言赞赏、动作表扬等给予反馈,这种反馈有效维持了幼儿较高水平的积极性和注意力。
3. “社交性互动”为幼儿习得同伴交往的问题解决能力奠定情感基调
社交性互动体现在类人型机器人与幼儿之间良好的社会化关系上。Kahn及Flanagan等人的研究发现,儿童会认为类人型机器人具备智力、兴趣、情绪情感等心理状态,并赋予其友善、可信任等品质[17-18]。Caroline等也发现,即使告知儿童关于类人型机器人的机械属性,儿童将机器人视为社会化他人的看法仍未减弱[19]。这揭示了一个现象,即当幼儿面对类人型机器人时,他们之间可以形成一种近乎自然的“社会性关系”。显然,良好的社会性关系是促成高质量幼儿教育的重要条件,正如现实生活中和谐的师幼关系可促进幼儿的学习表现。同理,幼儿与类人型机器人之间的这种近似真实的社会化关系,为幼儿在类人型机器人辅助教育干预中获得有效的学习成就创设了积极的情感氛围。在本研究中,实验组1的幼儿见到“悟空机器人”都会表现出极为热情的动作和表情,并对“悟空机器人”的语言、动作反馈始终保持关注,这无疑证实了类人型机器人与幼儿之间社会化关系的存在。
综上所述,具身性互动、教学性互动、社交性互动有机构成了类人型机器人有效辅助幼儿同伴交往的问题解决能力教育干预的三维保障。应当承认,人类教师单独实施教育干预同样存在这三类互动。但不同的是,当类人型机器人辅助人类教师来实施教育干预时,这三类互动强度会更强烈。这使得参与类人型机器人辅助教育干预的幼儿,其同伴交往的问题解决能力的提升幅度会更大。
(二) “教师使用机器人”干预模式在提升幼儿行为结果预测技能上与“教师单独实施”的成效无异
研究发现,相比于教师单独实施教育干预,具有类人型机器人辅助的教育干预并未在提升幼儿的行为结果预测方面表现出特别优势。诚然,相比其他维度,行为结果预测是一种较为复杂的社会推理能力。这可能揭示了一个现象,即类人型机器人辅助教育干预在提升诸如行为结果预测这类复杂性社会技能上存在自限性。
1. 作为复杂性社会技能的“行为结果预测”对干预活动的设计提出了更高要求
从能力本身的属性看,行为结果预测是对个体社交行为的结果事件的推理。一方面,相比于多元方法生成等,行为结果预测技能的发展需要更高级的社会性技能的加持。Rubin以及李红等人的研究认为,心理理论、执行功能的发展与幼儿的社会性推理和预测技能存在紧密关系[20-21]。这要求机器人辅助教育干预的内容不仅要包含针对行为结果预测的学习内容,还要涉及其他诸如心理理论、执行功能等相关技能的学习。但在本研究中,干预内容的设计仅针对行为结果预测这一范畴。另一方面,行为结果预测技能的发展受到幼儿自身经验的影响。有研究发现,当幼儿面对同伴交往情境时,其对情境信息的认知广度、熟悉度以及处理问题的经验储备等都会影响到行为结果的预测水平[22]。在现实生活中,教师和家长极少引导幼儿预测自身的行为结果,致使幼儿在行为结果预测方面缺少相应的经验,熟悉程度不高。因此,在行为结果预测技能方面,类人型机器人辅助教育干预未能彰显其优势。
2. 机器人的编程设定使其无法回应幼儿关于行为结果预测的随机性问题
从类人型机器人的技术看,研究中所使用的“悟空机器人”主要按照预设的编程来推进干预活动,无法回应幼儿在活动期间所提出的个别问题(如未被编程所涵盖的)。在行为结果预测技能上,一些幼儿原本就缺乏相应的经验。因此,当机器人讲述与行为结果预测相关的内容时,幼儿会随机提出较多的问题或困惑;但由于“悟空机器人”是按照编程来实施活动的,无法回应幼儿随机提出的这些问题或困惑。Tolksdorf等人的研究发现,类人型机器人只能在非常有限的环境中自主运行,它们在非结构化环境中的完全自主行为目前几乎是不可能的[23]。孔苏等认为,人工智能的预成性脚本化编程,弱化了其教育价值的发挥[24]。因此,要想有效提升幼儿的行为结果预测技能,不仅需要机器人有针对性地传递相关教学内容,而且还要求机器人能够按照幼儿的需求给予个性化回应。但遗憾的是,当前机器人技术仍无法支撑这一目标的实现,使得关于行为结果预测的干预成效并不明显。
五、结 束 语
本研究将“悟空机器人”作为关键工具,为教育干预的顺利推进提供了巨大的支持。但由于当前机器人技术的局限性,“悟空机器人”并未能实现完全的自动化和智能化。为此,研究采用了编程方式对“悟空机器人”实施教育干预的过程进行了预设编程。编程有助于机器人实施结构化的教育干预,但也限制了机器人对幼儿的反应范畴。未来研究应选择更为智能化的类人型机器人作为辅助工具,促使机器人既能实施结构化的干预活动,还能对干预期间幼儿的随机性问题进行回应。此外,尽管类人型机器人教育干预在短期内取得了一定成效,但其长期影响作用仍未被揭示。未来可采用追踪研究的方法,探究类人型机器人辅助教育对幼儿同伴交往的问题解决能力的长效影响。
[参考文献]
[1] VLACHOU A, STAVROUSSI P. Prolving skills in children with mild intellectual disabilities [J]. Support for learning,2016,31(1):27-45.
[2] MONTES G, LOTYCZEWSKI B S, HALTERMAN J S, et al. School readiness among children with behavior problems at entrance into kindergarten: results from a US national study[J]. European journal of pediatrics,2012,171(3):541-548.
[3] 牛湘,冉光明. 同伴关系与幼儿问题行为关系的三水平元分析[J]. 心理发展与教育,2023,39(4):473-487.
[4] AKGUN S, ARAZ A. The effects of conflict resolution education on conflict resolution skills, social competence, and aggression in Turkish elementary school students[J]. Journal of peace education,2013,4:30-45.
[5] GAETE J, S?魣NCHEZ M, NEJAZ L, et al. Mental health prevention in preschool children: study protocol for a feasibility and acceptability randomised controlled trial of a culturally adapted version of the I can problem solve (ICPS) programme in Chile[J]. Trials, 2019,20(1):1-14.
[6] MARINO F, CHIL?魥 P, SFRAZZETTO S T, et al. Outcomes of a robot-assisted social-emotional understanding intervention for young children with autism spectrum disorders[J]. Journal of autism and developmental disorders,2020,50(6):1973-1987.
[7] KORY-WESTLUND J M, BREAZEAL C. A long-term study of young children's rapport, social emulation, and language learning with a peer-like robot playmate in preschool[J]. Frontiers in robotics and AI,2019,6:81.
[8] 单俊豪,宫玲玲,李玉,闫寒冰. 教育机器人对学生学习成果的影响——基于49篇实验或准实验研究论文的元分析[J]. 中国电化教育,2019(5):76-83.
[9] 周进,安涛,韩雪婧. 教育机器人对学生学习效果影响的元分析[J]. 现代远程教育研究,2019,31(3):96-105.
[10] 陈维维. 学龄前儿童人工智能启蒙教育的研究现状与实践路径[J]. 电化教育研究,2020,41(9):88-93.
[11] 柴阳丽,杜华. 低龄儿童人工智能启蒙教育框架和实施途径[J]. 电化教育研究,2022,43(9):89-97.
[12] 郁锋. 具心于身的跨学科对话[N]. 中国社会科学报,2023-02-08(9).
[13] FRIDIN M. Storytelling by a kindergarten social assistive robot: a tool for constructive learning in preschool education[J]. Computers amp; education,2014,70:53-64.
[14] KIM Y, TSCHOLL M. Young children's embodied interactions with a social robot[J]. Educational technology research and development,2021,69(4):2059-2081.
[15] CARUANA N, MOFFAT R, MIGUEL-BLANCO A, et al. Perceptions of intelligence amp; sentience shape children's interactions with robot reading companions[J]. Scientific reports,2023,13:7341.
[16] DE HAAS M, VOGT P, KRAHMER E. When preschoolers interact with an educational robot, does robot feedback influence engagement?[J]. Multimodal technologies and interaction,2021,5(12):77.
[17] KAHN P H Jr, GARY H E, SHEN S. Children's social relationships with current and near-future robots[J]. Child development perspectives,2013,7(1):32-37.
[18] FLANAGAN T, WONG G, KUSHNIR T. The minds of machines: children's beliefs about the experiences, thoughts, and morals of familiar interactive technologies[J]. Developmental psychology,2023,59(6):1017-1031.
[19] CAROLINE L, VAN S, JOCHEN P, RINALDO K, ALEX B. Transparency about a robot's lack of human psychological capacities:effects on child-robot perception and relationship formation [J]. Progress in artificial intelligence, 2020,9(2):1-21.
[20] RUBIN K H, ROSE-KRASNOR L.Interpersonal problem solving and social competence in children[M]//VAN HASSELT V B,HERSEN M. Handbook of social development. Boston, MA:Springer US,1992:283-323.
[21] 李红. 中国儿童推理能力发展的初步研究[J]. 心理与行为研究,2015,13(5):637-647.
[22] 王沛,杨斌芳. 因果条件中儿童社会信息推理的发展[J]. 心理科学,2004,27(4):799-802.
[23] TOLKSDORF N F, SIEBERT S, ZORN I, et al. Ethical considerations of applying robots in kindergarten settings: towards an approach from a macroperspective[J]. International journal of social robotics,2021,13(2):129-140.
[24] 孔苏,朱丹瑶. 人机协同教学的困境及其归因——以机器人教师“华君” 为例[J]. 电化教育研究,2024,45(8):58-63,70.
Applying Humanoid Robots to Enhance Young Children's Problem-solving Skills in Peer Interactions: An Educational Experiment-based Study
LIU Youpeng1," HONG Xiumin2
(1.Research Institute of Primary Education, China National Institute of Education Sciences, Beijing 100080; 2.Faculty of Education, Beijing Normal University, Beijing 100080)
[Abstract] Mastering problem-solving skill in peer interactions at an early age can have a profound impact on the quality of an individual's future work and life. At a time when artificial intelligence technology continues to evolve, the effectiveness of humanoid robot-assisted education on the problem-solving skills of young children in peer interactions needs to be explored. The study selected 70 4- to 5-year-old children from kindergartens as intervention subjects, forming experimental group 1 (n=27), experimental group 2 (n=20), and control group (n=23). The educational experimental method was used to investigate the effect of humanoid robot on children's" problem-solving skills in peer interactions. The results showed that the humanoid robot had a significant overall impact on children's problem-solving skills in peer interactions, with clear promotional effects on peer problem attribution, generation of diverse methods, and decision-making in behavioral strategies. But they failed to improve children's skill in" predicting behavioral outcomes. The mechanism by which humanoid robots effectively enhance the problem-solving skills of young children in peer interactions was discussed. A three-dimensional guarantee of humanoid robot-assisted education was constructed, consisting of \"embodied interaction\", \"pedagogical interaction\", and \"social interaction\". The self-limitation of humanoid robots in intervening to improve complex social skills such as predicting behavioral outcomes" was analyzed. The conclusion of the study is helpful in providing scientific guidance for the implementation of educational and teaching practices based on humanoid robots.
[Keywords]" Humanoid Robot; Artificial Intelligence Education; Problem-solving Skills in Peer Interaction; Young Children's Sociality; Educational Intervention
基金项目:2021年度国家自然科学基金面上项目“基于人机交互游戏的社会情感能力评估”(项目编号:62177010)
[作者简介] 刘友棚(1994—),男,广东汕尾人。助理研究员,博士,主要从事人工智能与儿童教育、婴幼儿心理发展与教育、学前教育政策研究。E-mail:liuyoupeng94@163.com。洪秀敏为通信作者,E-mail:xiuminhong@163.com。
猜你喜欢
中国电化教育(2020年2期)2020-03-31 09:26:04
学周刊(2019年28期)2019-10-16 08:01:49
科技创新与应用(2019年13期)2019-06-24 06:23:22
中国教育信息化·基础教育(2019年3期)2019-04-25 00:33:36
电脑知识与技术(2019年33期)2019-01-08 03:16:09
新课程·中旬(2018年8期)2018-11-20 11:56:44
学理论·下(2018年9期)2018-10-24 11:03:34
课程教育研究(2018年1期)2018-03-31 09:28:22
中学课程辅导·教师教育(上、下)(2018年24期)2018-02-18 01:29:02
未来英才(2017年18期)2017-10-24 15:30:25
