不断轨称重衡称重误差机理分析及误差补偿方法改进
2025-02-05 00:00:00屈延鹏周伦张泽超唐之龙刘广平张腾腾
粘接 2025年1期
关键词:传感器

摘要:针对轨道衡称重误差补偿不佳问题,提出不断轨称量轨式动态衡原理及轨道衡称重误差补偿方法。分析剪力称重波形图,确定传感器非线性特性,结合梯度训练法回归方程,构建误差补偿模型。计算轨道衡在稳定与倾斜状态下的受力,构造传感器输入输出拟合函数,进行误差逼近补偿。实验结果显示,补偿后误差最大减12.13 kg,倾角0°~35°内波动值控于0.7 kg以下,有效提升了补偿效果。
关键词:不断轨称量轨式动态衡;称重误差;传感器;误差补偿;梯度训练法
中图分类号:TP216;O213.1文献标识码:A文章编号:1001-5922(2025)01-0149-04
Analysis of the error mechanism of non-rail weighing scale and improvement of error compensation method
QUYanpeng1,ZHOU Lun2,ZHANG Zechao2,TANG Zhilong2,LIU Guangping2,ZHANG Tengteng1
(1.China Railway Fourth Bureau Group Sixth Engineering Co.,Ltd.,Xi’an 712000,China;
2.Huating Coal Industry Group Co.,Ltd.,Huating 744100,Gansu China)
Abstract:Aiming at the problem of poor weighing error compensation of track balance,the principle of dynamic balance and the method of weighing error compensation were proposed.The shear weighing waveform map was analyzed,the nonlinear characteristics of the sensor were determined,and the error compensation model was constructed by combining the regression equation of gradient training method.The force of the rail scale in the sta⁃ble and inclined states was calculated,and the sensor input and output fitting function was constructed to compen⁃sate for the error approximation.The experimental results showed that the maximum error after compensation was re⁃duced by 12.13 kg,and the fluctuation value within the inclination angle of 0°~35°was controlled below 0.7 kg,which effectively improves the compensation effect.
Key words:continuous rail weighing rail type dynamic balance;weighing error;sensors;error compensation;gradi⁃ent training method
随着物流业的快速发展,快速准确的称重已成为铁路、公路等运输领域亟待解决的问题。国内外学者对连续轨道动态称重的原理以及轨道称重误差的补偿方法进行了广泛的研究。如通过采集三轴磁传感器的原始数据,使用特定的算法对误差进行建模和计算,并根据计算结果实时调整磁传感器的输出,实现误差补偿[1]。从激光共焦位移传感器收集原始数据,并提取与倾角相关的误差分量,补偿倾角误差[2]。针对以上分析,对不断轨称量轨式动态衡称重误差补偿方法展开深入研究,以提高轨道秤的称重精度和稳定性,希望为物流运输领域提供更高效、更可靠的称重解决方案,促进行业技术进步和应用创新。
1 不断轨称量轨式动态衡原理
不断轨称量轨式动态衡是一种先进的基于电磁感应的动态称重设备。该设备主要由称重导轨、传感器、信号处理器和显示器组成。当货物通过称重轨道时,货物产生的压力会导致称重轨道变形,从而改变其磁场分布[3] 。在检测到这种变化后,信号处理器处理传感器获取的信号,并在显示器上显示结果。通过这种方法,可以实现货物的快速准确称重。另外,通过转换剪力采样的跟踪模式,多个车轮一起称重,即可实现整车计量。
该称重装置由于其连续轨道设计,避免了传统称重装置需要轨道中断或更换的麻烦[4] 。此外,由于采用了电磁感应原理,连续称重轨道式动平衡具有高稳定性和高效率的特点,可同时完成单轮称重和整车称重。
2 轨道衡称重误差补偿方法
2.1 不断轨称量轨式动态衡传感器非线性特性确定
基于上述阐述的不断轨称量轨式动态衡原理,并且考虑利用轨道衡进行称重时,由于受到传感器误差、轨道不平整、风力干扰等因素,传感器输出的结果易产生误差[5] 。因此,为合理补偿轨道衡称重误差,需要根据不断轨称量轨式动态衡的工作原理,对称重误差产生的机理进行分析,由此设计适当的补偿方式,提高输出结果的精确度。
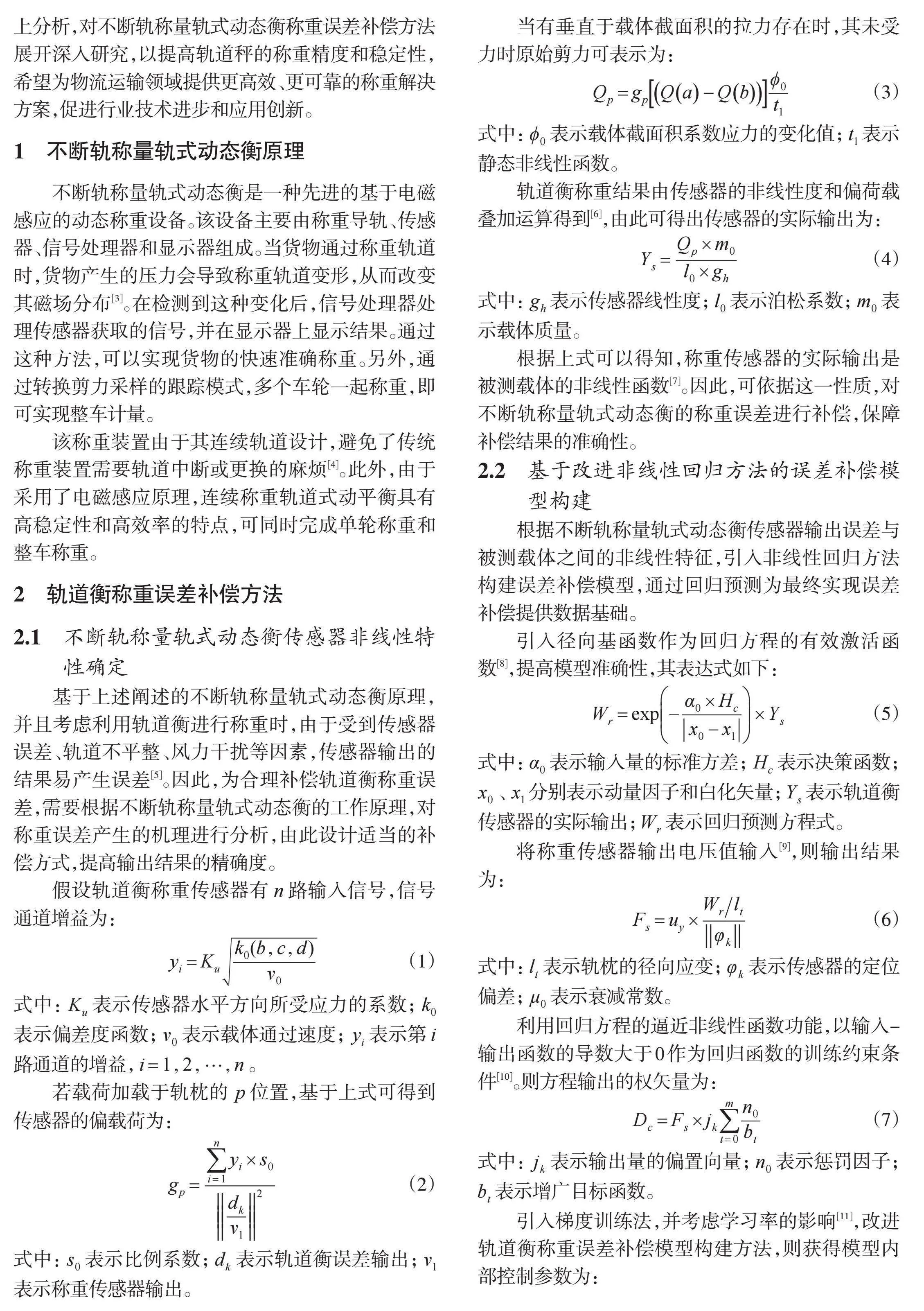
假设轨道衡称重传感器有 n 路输入信号,信号通道增益为:
式中:Ku 表示传感器水平方向所受应力的系数;k0 表示偏差度函数;v0 表示载体通过速度;yi表示第i路通道的增益,i = 12n 。
若载荷加载于轨枕的 p 位置,基于上式可得到传感器的偏载荷为:
式中:s0表示比例系数;dk表示轨道衡误差输出;ν1表示称重传感器输出。
当有垂直于载体截面积的拉力存在时,其未受力时原始剪力可表示为:
式中:ϕ0表示载(Q)体(p=)截(gp)化值;t1示(3))静态非线性函数。
轨道衡称重结果由传感器的非线性度和偏荷载叠加运算得到[6],由此可得出传感器的实际输出为:
式中:gh表示传感器线性度;l0表示泊松系数;m0表示载体质量。
根据上式可以得知,称重传感器的实际输出是被测载体的非线性函数[7]。因此,可依据这一性质,对不断轨称量轨式动态衡的称重误差进行补偿,保障补偿结果的准确性。
2.2基于改进非线性回归方法的误差补偿模型构建
根据不断轨称量轨式动态衡传感器输出误差与被测载体之间的非线性特征,引入非线性回归方法构建误差补偿模型,通过回归预测为最终实现误差补偿提供数据基础。
引入径向基函数作为回归方程的有效激活函数[8],提高模型准确性,其表达式如下:
式中:α0表示输入量的标准方差;Hc表示决策函数;x0、x1分别表示动量因子和白化矢量;Ys表示轨道衡传感器的实际输出;Wr表示回归预测方程式。
将称重传感器输出电压值输入[9],则输出结果为:
式中:lt表示轨枕的径向应变;φk表示传感器的定位偏差;μ0表示衰减常数。
利用回归方程的逼近非线性函数功能,以输入-输出函数的导数大于0作为回归函数的训练约束条件[10]。则方程输出的权矢量为:
式中:jk表示输出量的偏置向量;n0表示惩罚因子;bt表示增广目标函数。
引入梯度训练法,并考虑学习率的影响[11],改进轨道衡称重误差补偿模型构建方法,则获得模型内部控制参数为:
式中:gc表示参数的迭代次数;vk表示狄拉克函数;er表示模拟参数。
在平衡状态下9(:))
式中:w1、w2分别表示轨道衡稳定状态和倾斜状态的受力;α表示轨道衡倾角。
根据输入与输出的关系构建轨道衡称重误差补偿模型,表达式如下:
式中:η0表示传感器的绝对零点值;Mt表示模型的交叉验证参数。
根据不断轨称量轨式动态衡的工作原理,结合轨道衡称重动态衡传感器非线性特性,采用梯度训练法改进后的回归方程构建误差补偿模型,便于后续进一步提高轨道衡进行误差补偿的准确性。
2.3实现误差补偿
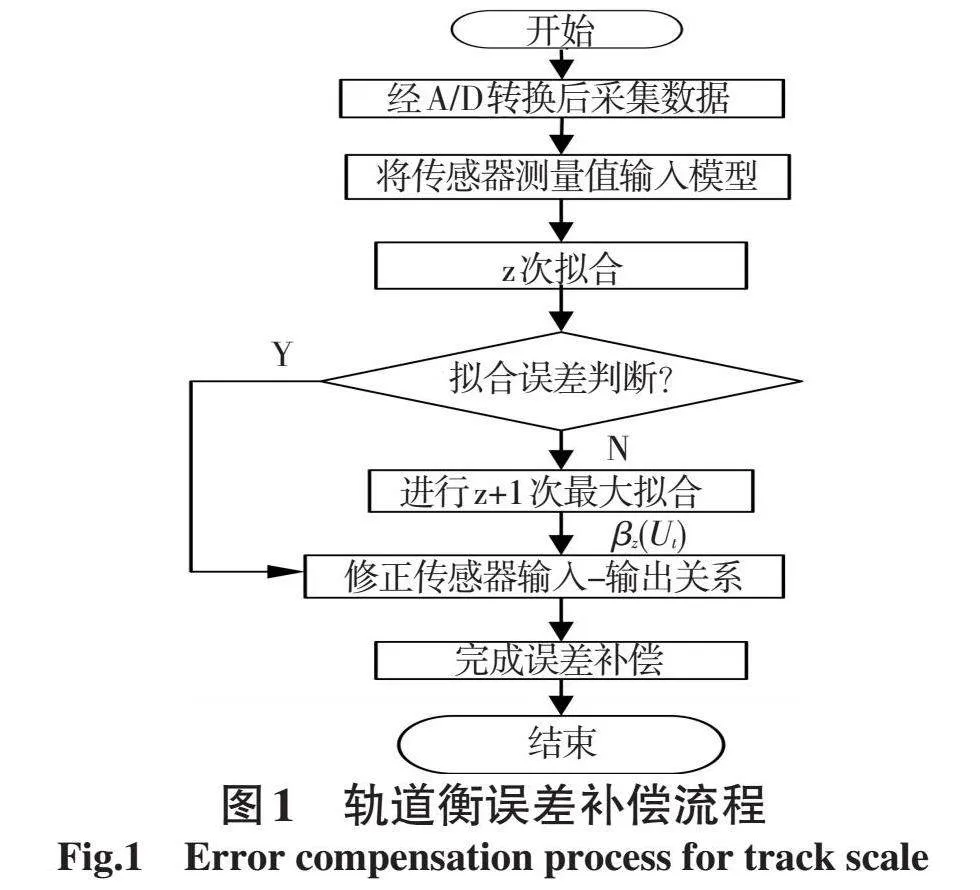
构建误差补偿模型后,考虑称重传感器非线性误差,需采用多变量拟合进行误差判别,在最大拟合次数内补偿[12],进而提高准确性,处理流程如图1所示。
利用A/D转换器将传感器的运行参数转换为数字量,并与传感器测量值一同输入到构建的误差补偿模型中[13],得到模型的输出结果为:
式中:κz表示传感器运行参数的数字量;ec表示传感器测量值;λk表示经验常数;Ut表示模型输出的理想载荷。
将标准载荷测量值与轨道衡测量值拟合z次,得到拟合函数βzUt,并判断拟合误差是否低于预设值,并进行z1次拟合以修正传感器输入与输出的关系[14],得到修正后的轨道衡称重误差补偿方式,表达式如下:
式中:hm表示标准载荷传感器测量样本集合。
至此,完成不断轨称量轨式动态衡称重误差补偿方法的设计。
3实例论证分析
3.1实验方法
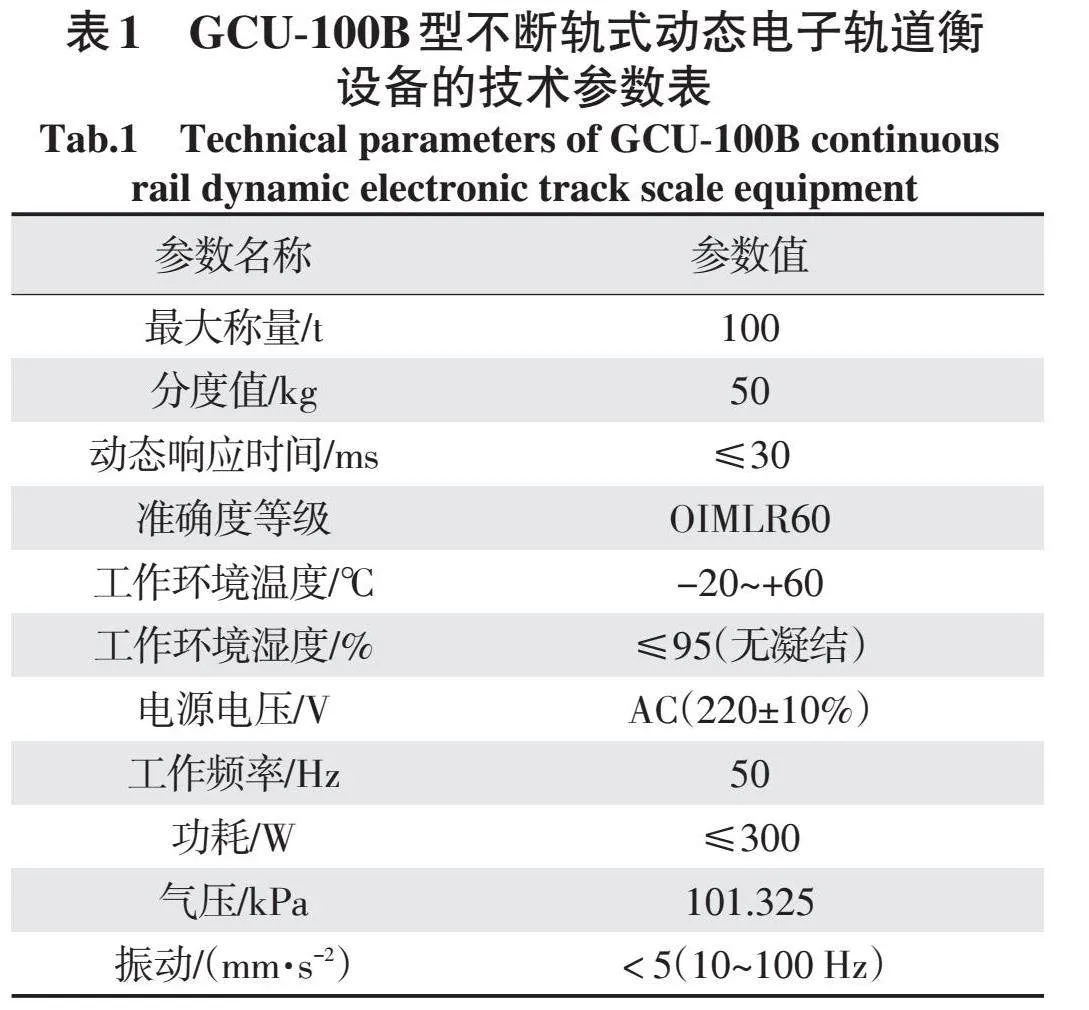
实验以GCU-100B型不断轨式动态电子轨道衡设备为研究对象。该称重系统包括称重传感器,负责检测轨道上的动态载荷;电阻应变传感器,将载荷转换为电信号等。轨道结构采用高强度、耐腐蚀的钢和铝合金材料。该设备的基本技术指标参数如表1所示。
选择一个等级为M1、质量为1 t、扩展不确定度为0.03%(k=2)的标准砝码作为被测载体;实验采集系统为工控机,包括一个采样频率为1 kHz的16位AD转换器和一个USB接口,便于连接到计算机用于轨道衡称重数据的实时采集;对工控机配置了Intel Core i7处理器、8 GB内存,并运行于Windows 10操作系统,便于数据处理、分析;采用数字万用表和示波器,用于实验前轨道衡的预检查和调试,以确保其正常工作。
3.2实验验证
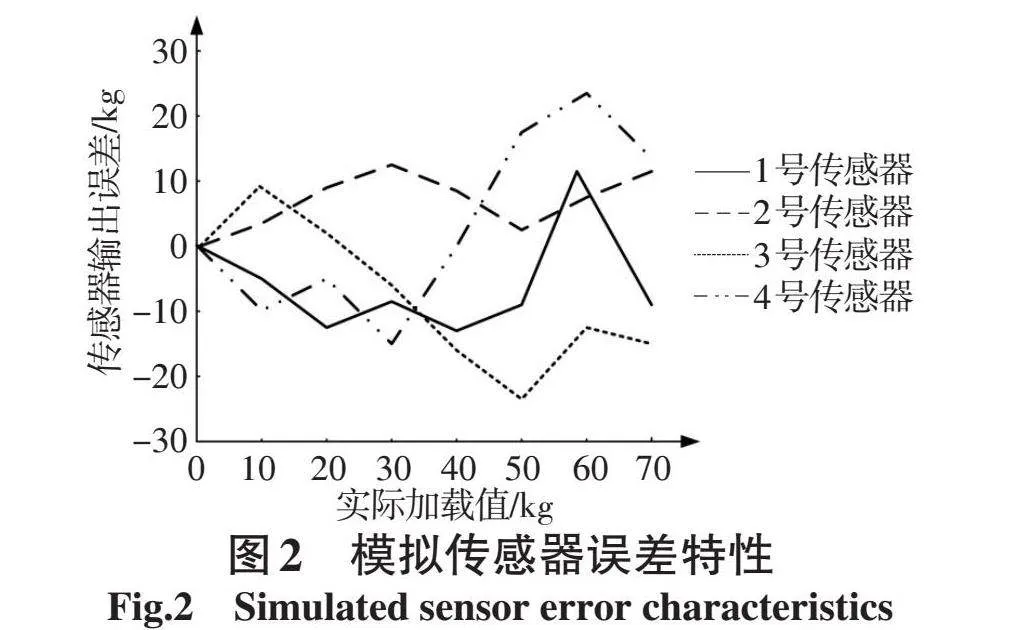
在仿真模拟的传感器特性中加入一定的非线性误差,并模拟真实的作业概况。对轨道衡系统的4个传感器输出误差进行采集,结果如图2所示。
由图2可知,4个传感器输出均存在误差,其影响轨道衡称重结果。
3.3轨道衡称重误差补偿结果
实验以其中的1路传感器计量值为研究数据。引入卷积神经网络算法(方法1)、激光测距传感测距技术(方法2)与所提方法分别对该系统进行称重误差补偿,比较补偿前后的误差值,结果如表2所示。
由表2可知,应用所提方法进行称重补偿后,补偿后的称重误差比未补偿时的误差最大减少了12.13 kg,说明所提方法对于不断轨称量轨式动态衡称重误差的补偿效果较为优越。而方法1和方法2补偿效果不佳的主要原因是这2种方法建立的误差补偿模型无法很好地逼近目标量,导致补偿性能不理想。
3.4结果对比分析
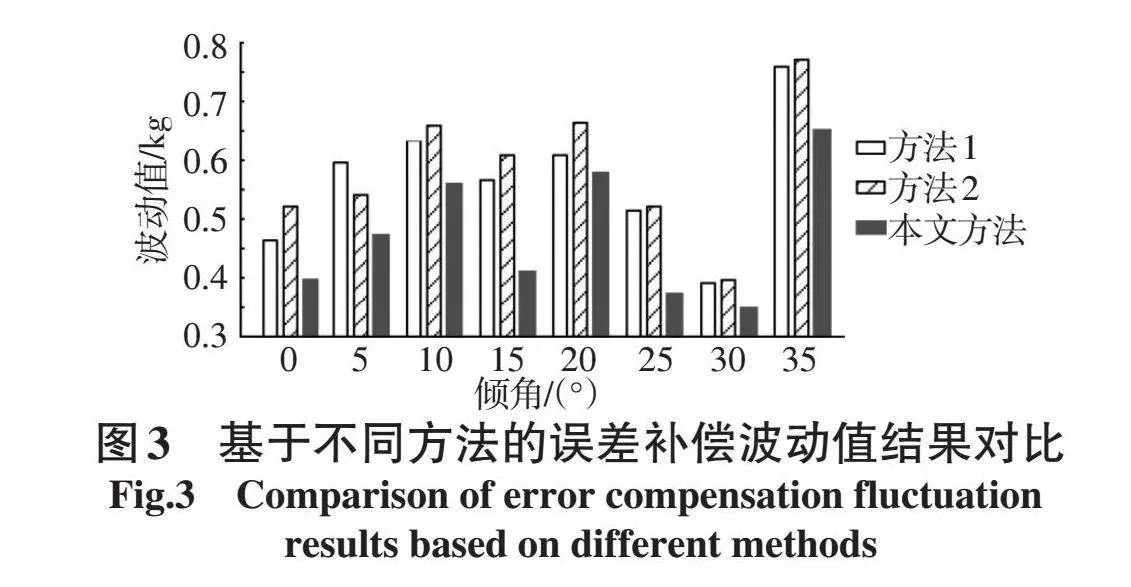
为进一步验证所提方法的可靠性,采用补偿前后称量的波动值这一指标作为评估不同方法的误差补偿性能。以质量为1 t的标准砝码为被测对象,根据传感器输出值采用3种方法对轨道衡系统进行称重误差补偿,比较不同方法在补偿前后称量的波动值。对比结果如图3所示。
由图3可知,在被测载体的不同倾角条件下,所提方法的误差补偿波动值远低于方法1和方法2,倾角为0°~35°,所提方法的误差补偿波动值始终控制在0.7 kg以下。由此可以说明所提方法对于轨道衡系统的称重误差补偿效果更佳。
4结语
为降低轨道衡称重误差补偿波动,研究了不断轨称量轨式动态衡原理及轨道衡称重误差补偿方法。基于该原理确定传感器非线性特性,用梯度训练法改进回归方程构建模型,并采用多变量拟合进行误差判别与补偿。实例分析显示,最大误差降低12.13 kg,补偿波动值控制在0.7 kg以下,并且补偿波动值小,该方法有效提高了轨道衡称重误差补偿效果。
【参考文献】
[1]段国文,杨迪,吕辰.三轴磁传感器在线误差补偿方法[J].传感器与微系统,2023,42(5):41-44.
[2]胡帅,张楠.一种激光共焦位移传感器倾角误差补偿方法[J].机械设计与研究,2023,39(5):138-141.
[3]金政翰,杨恺斯,吴慧媛,等.一种立式联轴器扭转刚度测试台的误差补偿模型[J].机械传动,2023,47(10):155-161.
[4]蒋爽,邓岚,彭澳,等.手推式电子叉车秤倾角与称重误差补偿算法研究[J].电子测量与仪器学报,2023,37(9):133-141.
[5]谢志峥,王衍学,王一变温环境下充水管道导波监测的复合误差补偿方法[J].电子测量与仪器学报,2023,37(8):173-181.
[6]周凯红,冉红梅,蒋青谷,等.基于改进BP神经网络的数显千分表非线性误差补偿[J].现代制造工程,2023,(7):117-122.
[7]吴刚,方新秋,宋扬,等.基于捷联惯导的采煤机运行姿态感知与误差补偿实验研究[J].采矿与安全工程学报,2023,40(4):668-678.
[8]袁丁,王艳红,雒旭峰.基于自适应滤波的无人机视觉导航误差补偿方法研究[J].中国安全生产科学技术,2023,19(6):193-198.
[9]鲁明旭,罗绮.基于自动控制的化工有害气体传感器优化研究[J].粘接,2023,50(6):127-130.
[10]岑志波,周盛薇,周娟.基于改进BP神经网络的远传水表示值误差补偿方法[J].中国计量大学学报,2023,34(2):172-178.
[11]孙秀照,雷贤卿,王笑一.圆光栅测角误差实时补偿方法研究[J].机电工程,2023,40(10):1633-1640.
[12]李君,蒋金伟,刘进福.直角坐标机器人轮廓误差补偿算法设计[J].机械与电子,2023,41(10):35-38.
[13]李林峰,黄启泰,任建锋,等.单屏相位测量偏折术中的透明层折射误差补偿[J].激光与光电子学进展,2023,60(9):265-269.
[14]尹兴超,郭瑜,樊家伟,等.增量式光学编码器IAS信号误差建模及补偿[J].仪器仪表学报,2023,44(2):50-58.(责任编辑:平海,苏幔)
猜你喜欢
学苑创造·A版(2023年6期)2023-06-16 01:16:11
小学科学(2022年8期)2022-09-07 07:53:46
商品与质量(2021年43期)2022-01-18 05:27:30
云南化工(2021年8期)2021-12-21 06:37:00
纺织科学研究(2021年1期)2021-12-03 15:04:42
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
电子制作(2019年7期)2019-04-25 13:17:14
时代英语·高一(2019年1期)2019-03-13 10:29:48
电子制作(2018年9期)2018-08-04 03:30:58