基于DSAE-VGG的无人机定位跟踪技术
2025-02-05 00:00:00张首军金宪才高兴山迟庆志
粘接 2025年1期
关键词:雷达探测


摘要:为提高无人机的识别准确率,基于深度稀疏自编码网络(DSAE)和视觉几何组(VGG)深度卷积网络,提出一种DSAE-VGG无人机识别模型。采用DSAE对雷达探测的无人机数据进行了特征降维,根据雷达探测的无人机数据设计改进了VGG网络结构,并利用改进的VGG网络对特征降维后的数据进行分类识别,实现了无人机的有效识别。仿真结果表明,所提模型可准确识别单旋翼、四旋翼、六旋翼无人机,且具有较高的准确率,平均识别准确率达到97%,相较于CNN模型和VGG模型,平均识别准确率分别提高了8.24%和4.22%,具有一定的优越性,可满足基于雷达探测的无人机识别准确率要求。
关键词:雷达探测;无人机识别;DSAE网络;VGG网络
中图分类号:TP399文献标识码:A文章编号:1001-5922(2025)01-0141-04
Esearch on UAV location and tracking technology based on radar detection
ZHANG Shoujun,JIN Xancai,GAO Xingshan,CHI Qingzhi
(State Grid Heilongjiang Electric Power Co.,Ltd.,Hegang Power Supply Company,Hegang 154100,Heilongjiang China)
Abstract:To improve the recognition accuracy of drones,a DSAE-VGG drone recognition model was proposed based on Deep Sparse Auto Encoder(DSAE)and VGG networks.DSAE was used to reduce the feature dimension of the UAV data detected by radar,and the VGG network structure was designed and improved according to the UAV data detected by radar,and the improved VGG network was used to classify and identify the data after feature dimensionality reduction,so as to realize the effective identification of UAV.The simulation results showed that the proposed model could accurately identify single rotor,four rotor,and six rotor unmanned aerial vehicles,and had a high accuracy rate,with an average recognition accuracy of 97%.Compared with the CNN model and VGG model,the average recognition accuracy had been improved by 8.24%and 4.22%,respectively.It has certain advantages and can meet the accuracy requirements of radar detection based unmanned aerial vehicle recognition.
Key words:radar detection;drone identification;DSAE network;VGG network
随着人工智能技术的不断发展,能快速准确完成任务的无人机在商业、农业、军事等领域的应用日益普及,对降低任务成本,提高任务完成效率发挥着至关重要的作用。因此,有必要及时对无人机进行快速准确识别。对此,相关学者进行了研究,如通过对无人机雷达回波进行建模,并利用深度学习提取、增强无人机特征进行识别,有效解决了无q人机等低慢小目标的识别[1];提出一种基于双目测距和YOLOv5s的无人机识别定位追踪方法,通过采用YOLOv5s网络进行识别,并使用KCF追踪算法锁定无人机[2];利用一种基于信号线圈的多无人机识别方法,可有效识别多无人机及多机舱环境,一定程度上保障了无人机应用安全[3]。通过上述研究可以发现,基于雷达探测的无人机识别方法在无人机识别领域取得了良好的效果,可有效获取无人机位置、状态等信息,但在利用深度学习进行识别时,存在识别精度不高的问题。基于此,在雷达探测无人机基础上,通过采用DSAE网络对雷达回波数据进行降维,然后利用改进的VGG网络进行分类识别,提出一种DSAE-VGG无人机识别模型。
1基本算法
1.1 DSAE网络简介
DSAE网络是由多个稀疏自编码器(SAE)构成的一种堆栈自编码器,其基本单元为SAE网络。DSAE网络结构如图1所示[6],其中,N表示SAE数量,研究后续通过实验进行确定。
DSAE网络可有效压缩输入数据的维度,并保留输入数据的关键特征信息[7]。考虑到研究中雷达探测的无人机回波微多普勒谱图特征维度较高,若直接采用分类识别网络进行识别,可能会增加计算成本。因此,首先采用DSAE网络进行了特征降维。
1.2 VGG网络原理及改进
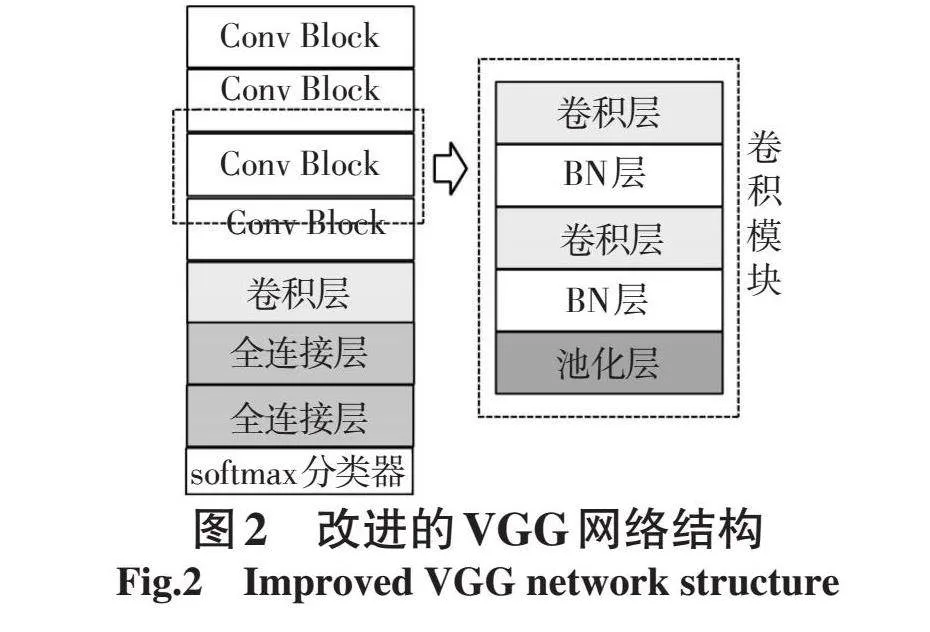
VGG网络是一种经典的深度神经网络,通过采用深度架构和连续的卷积层以及较小的卷积核,可有效减少参数量,提高网络的训练速度和泛化能力[8-11]。因此,采用VGG网络用于识别雷达探测的无人机回波微多普勒谱图。VGG网络结构是一个框架,可根据实际进行调整,以平衡网络规模和性能[12-13]。研究根据雷达探测的无人机回波微多普勒谱图,在VGG网络结构基础上进行了改进,具体改进策略如下:
(1)雷达探测的无人机回波微多普勒谱图通过DSAE网络进行了特征降维,因此可减少VGG网络的卷积层数,并将2个卷积层和一个池化层组成一个模块,采用9层卷积层。同时,为保证网络快速收敛,在每个卷积层后增加一个BN层;
(2)根据DSAE网络中间层输出特征维度大小,将卷积层的卷积核尺寸修改为1×3,池化层池化核尺寸修改为1×2,以确保网络卷积与池化操作过程匹配;
(3)根据DSAE网络降维后的一维特征在原始微多普勒谱图上相关的特点,将全连接层前一层卷积网络的卷积核尺寸修改为3×3,以确保网络可快速学习到特征间的相关性。
根据上述改进,可得到改进后的VGG网络结构如图2所示。
2基于DSAE-VGG的无人机定位跟踪技术
结合DSAE网络和改进的VGG网络,研究提出一种DSAE-VGG网络模型,用于无人机识别,具体识别流程如下:
(1)数据采集与预处理。收集整理雷达探测的无人机数据,并根据多普勒效应将雷达数据转化为微多普勒图[14]。考虑到数据存在差值过大和分布不均的问题,会影响最终分类识别结果,对微多普勒谱图进行分块、零均值化筛选等预处理;
(2)数据降维。基于预处理后的微多普勒谱图,采用DSAE网络进行特征降维;
(3)数据分类识别。基于DSAE网络特征降维后的图像,利用改进的VGG网络进行分类识别,其输出结果即为无人机识别结果。
3仿真实验
3.1实验环境搭建
实验基于pytorch深度学习框架搭建DSAE-VGG模型,并在Windows10操作系统中运行。系统配置In⁃tel i5 9400 F CPU,NVIDIA GeForce RTX2060 GPU。
3.2数据来源及预处理
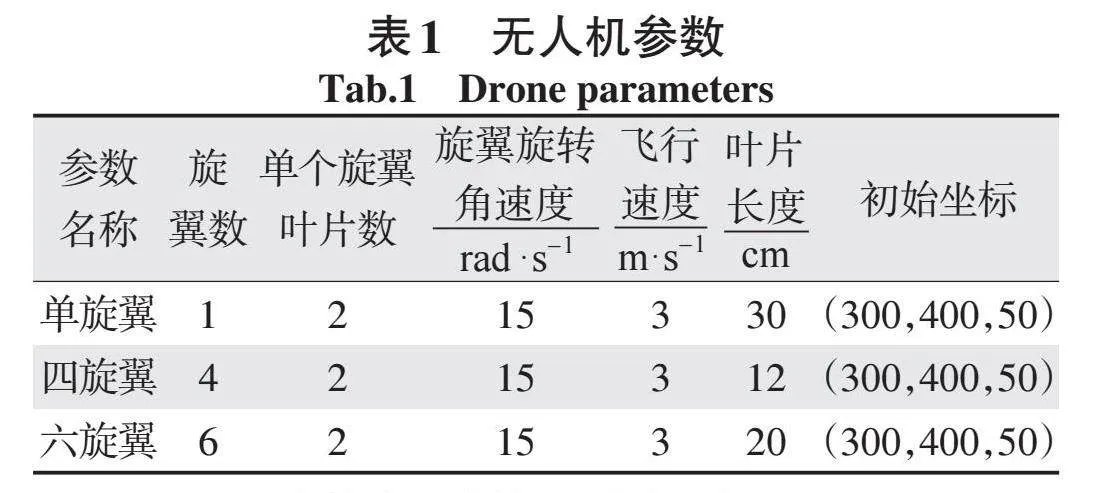
实验数据由仿真实验获取,首先根据LFMCW雷达回波原理和无人机微多普勒效应,得出无人机单个叶片和多个叶片回波公式[15];然后通过选取无人机参数,得到无人机回波,无人机参数如表1;最后利用长度为512个采样点的汉宁窗对无人机回波进行短时傅里叶变换(STFT),得到微多普勒谱图,作为实验数据,用于所提DSAE-VGG模型识别。
通过上述仿真,最终实验得到用于DSAE-VGG模型识别的无人机微多普勒谱图共3 000张,并将其按2:1比例划分为训练集和测试集。
3.3评价指标
实验选用准确率(ACC)作为评估所提DSAE-VGG模型对雷达探测无人机微多普勒谱图识别效果的性能指标,其计算方法如式(1)[16]:
式中:TP表示真正例;TN表示真负例;FP表示假正例;FN表示假负例。
3.4参数设置
实验设置所提模型的超参数为:最大迭代次数100次,批处理大小128,优化算法Adam,DSAE网络和VGG网络的初始学习率分别为0.000 1和0.000 5,损失函数分别为均方误差和交叉熵[17-18]。训练过程中,为达到良好的收敛效果,设置每经过20个训练轮次,DSAE网络和VGG网络的学习率衰减为原来的0.2倍[19-20]。
3.5结果与分析
3.5.1模型性能分析
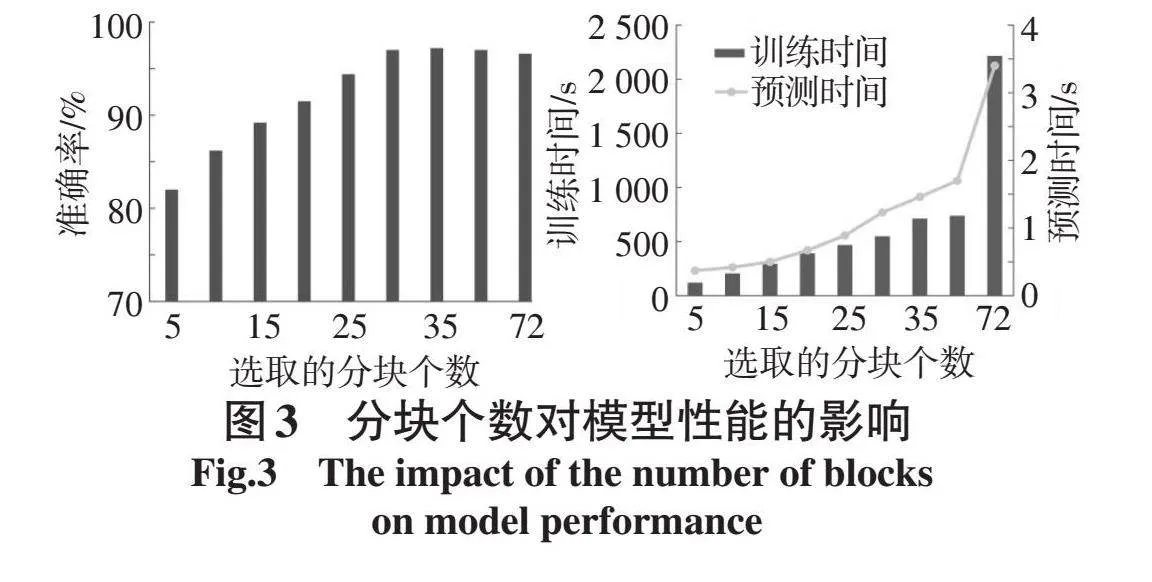
(1)分块个数的影响。考虑到微多普勒谱图中分
块个数可能会对模型最终识别效果造成影响,研究设置了不同分块个数并设定DSAE网络层数为3层,降维后特征维度为256。不同分块个数下所提模型的准确率和训练与预测时间如图3所示。
由图3可知,随着分块个数的增加,所提模型的识别准确率先上升后下降,训练时间和预测时间均逐渐增加;当分块个数为35个时,所提模型的识别准确率达到最大,为98.11%。通过综合分析所提模型的识别准确率和训练时间与预测时间,为保证模型的识别效果,同时保证模型的训练与预测时间在设定范围内,研究设置分块个数为35个。
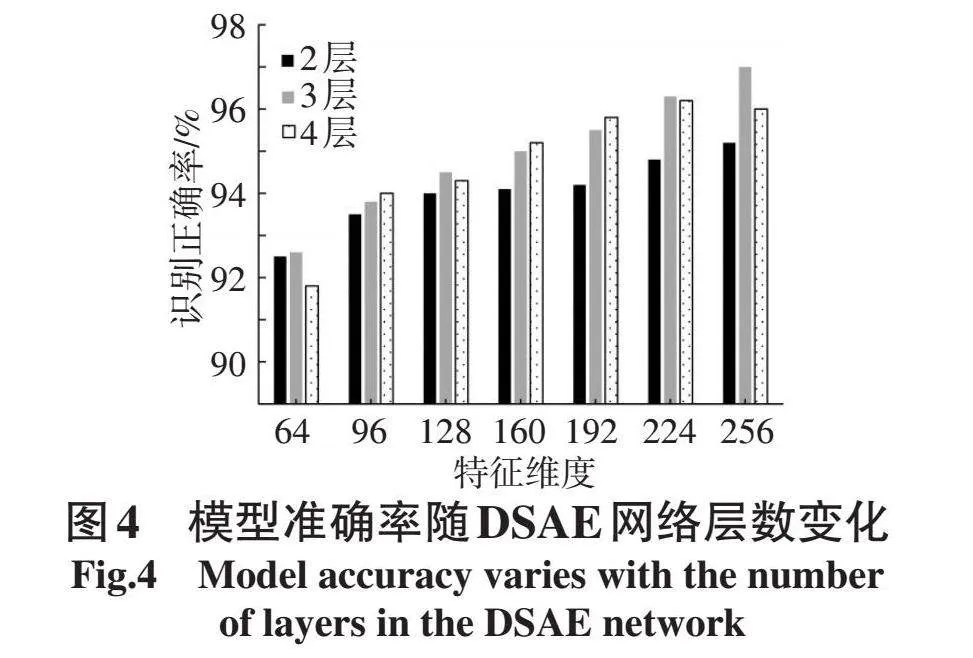
(2)DSAE网络层数的影响。DSAE网络层数决定了DSAE网络的参数量以及最终降维特征量,而不同特征量对改进VGG网络的识别效果不同。因此,为确定最佳DSAE网络层数,研究设置微多普勒谱图的分块个数为35,并分析了不同DSAE网络层数对所提模型性能的影响,结果如图4所示。
由图4可知,不同DSAE网络层数条件下,随着特征维度的增加,所提模型识别准确率均逐渐上升,当特征维度为256维时,识别准确率均达到最大值。整体来看,当DSAE网络层数为3层时,所提模型的识别准确率最高,平均识别准确率达到97%。因此,本研究设定DSAE网络层数为3层。
3.5.2模型对比
(1)降维方法对比。为进一步验证所提模型采用DSAE网络对微多普勒谱图特征降维的有效性,研究对比了所提模型采用3层DSAE网络降维方法,以及常用数据降维方法PCA与NMF方法降维后,VGG网络的识别准确率,结果如图5所示。
由图5可知,相较于PCA和NMF对比方法,采用所提DSAE网络对微多普勒谱图进行特征降维后,VGG网络的识别准确率更高,平均识别准确率为97%,分别提升了3%和9%,且更具有稳定性。由此说明,所提模型采用DSAE网络进行图像特征降维具有一定的优越性。
(2)识别网络对比。为验证所提模型通过DSAE网络降维后采用改进VGG网络进行识别的有效性,研究对比了所提模型与常用分类识别模型CNN和SVM模型,在实验数据集上的准确率。
不同模型对无人机微多普勒谱图的识别准确率不同,其中CNN模型对不同旋翼无人机的识别准确率最低,平均识别准确率为88.76%,所提DSAE-VGG模型对不同旋翼无人机的识别准确率最高,平均识别准确率为97%。根据不同模型识别准确率来看,所提DSAE-VGG模型的识别准确率相较于CNN模型和VGG模型分别提高了8.24%和4.22%。通过综合考虑识别时间,所提DSAE-VGG模型识别时间为1.24 s;而CNN和VGG模型的识别时间分别为25.36 s和32.11 s,一定程度上增加了时间成本。由此可知,所提DSAE-VGG模型在无人机识别方面具有一定的优越性。
4结语
综上所述,所提的基于雷达探测的无人机识别方法,通过利用雷达原理和多普勒效应将雷达探测的无人机数据转化为微多普勒谱图,并采用DSAE网络对无人机微多普勒谱图进行特征降维,然后采用改进的VGG网络进行分类识别,有效实现了无人机识别。相较于PCA与NMF降维方法,所提模型采用DSAE网络对微多普勒谱图进行特征降维后,VGG网络的识别准确率更高,平均识别准确率为97%,分别提升了3%和9%,且更具有稳定性;相较于常用分类识别模型CNN和VGG模型,所提模型采用VGG网络识别无人机具有更高的准确率,平均识别准确率为97%,分别提高了8.24%和4.22%,具有一定的优越性,可满足基于雷达探测的无人机识别准确率要求。
【参考文献】
[1]陈小龙,陈唯实,饶云华,等.飞鸟与无人机目标雷达探测与识别技术进展与展望[J].雷达学报,2020,9(5):803-827.
[2]梅枫,高兴宇,邓仕超,等.双目测距和YOLOv5s的无人机快速识别定位追踪系统[J].现代电子技术,2023,46(10):181-186.
[3]龚文兰,陈绍南,肖静,等.基于信号线圈的多无人机身份识别方法研究[J].重庆大学学报,2023,46(7):113-120.
[4]陈晨,任南.基于SAE和GNDO-SVM的脑电信号情绪识别[J].计算机系统应用,2023,32(10):284-292.
[5]聂磊,蔡文涛,张吕凡,等.基于SAE-SA-1D-CNN-BGRU的涡扇发动机剩余寿命预测[J].航空发动机,2023,49(4):134-139.
[6]姜东良,李天昊,刘文浩.基于相似日和SAE-DBiLSTM模型的短期电力负荷预测[J].电气工程学报,2022,17(4):240-249.
[7]王秋实,杨明,李鹏,等.基于LSTM-SAE与支持向量机的窃电识别方法研究[J].电力信息与通信技术,2022,20(9):51-58.
[8]吴怡啄,杨定礼,周辉,等.基于改进VGG网络的面部表情识别方法[J].电子器件,2023,46(4):1062-1069.
[9]童占北,钟建伟,李祯维,等.基于VGG16图像特征提取和SVM的电能质量扰动分类[J].电工电气,2023(7):7-13.
[10]王程远,赵俊莉,计晓斐,等.基于改进的VGG网络的烟柜状态识别模型[J].计算机工程与设计,2023,44(6):1796-1803.
[11]丁汕汕,陈仁文,黄翊君,等.重参数化VGG网络在滚动轴承故障诊断中的应用研究[J].振动与冲击,2023,42(11):313-323.
[12]麻方达,刘泽平,陈世海,等.基于VGG19卷积神经网络的图像拼接质量评价算法[J].青岛大学学报(工程技术版),2023,38(2):31-36.
[13]方宇伦,陈雪纯,杜世昌,等.基于轻量化深度学习VGG16网络模型的表面缺陷检测方法[J].机械设计与研究,2023,39(2):143-147.
[14]张林朋,杨红云,钱政,等.基于改进的VGG16网络和迁移学习的水稻氮素营养诊断[J].中国农业大学学报,2023,28(6):219-229.
[15]潘光松.基于深度学习的雷达低空小目标自动识别技术研究[D].成都:电子科技大学,2022.
[16]张伟光,钟靖涛,呼延菊,等.基于VGG16-UNet语义分割模型的路面龟裂形态提取与量化[J].交通运输工程学报,2023,23(2):166-182.
[17]郭昕刚,沈紫琪,王晓林.改进VGG网络的人脸表情识别[J].长春工业大学学报,2023,44(1):52-57.
[18]夏坚,周利君,张伟.基于迁移学习与VGG16深度神经网络的建筑物裂缝检测方法[J].福建建设科技,2022(1):19-22.
[19]赵子丰.风电场5G无人机巡检技术与路径优化设计[J].粘接,2023,50(7):184-188.
[20]汪杨凯,曾宏宇,赵然,等.基于航线自主规划的变电站无人机巡检[J].粘接,2021,48(12):173-177.
(责任编辑:平海,苏幔)
猜你喜欢
现代雷达(2024年2期)2024-04-11 10:42:54
现代雷达(2023年11期)2024-01-05 15:01:52
铁道通信信号(2020年6期)2020-09-21 09:23:24
成都信息工程大学学报(2018年5期)2018-12-06 09:23:52
测控技术(2018年3期)2018-11-25 09:45:52
科技创新与应用(2018年2期)2018-01-19 20:04:02
雷达学报(2017年3期)2018-01-19 02:01:07
北京航空航天大学学报(2017年12期)2017-04-23 08:31:51
中国新通信(2017年4期)2017-04-10 19:55:36
现代防御技术(2016年2期)2016-07-21 05:19:27