
基于扩散体的无透镜成像系统及其分辨率分析
2025-01-19 00:00:00刘明昊
物联网技术 2025年2期


摘 要:无镜头成像是一种以计算取代镜头的新兴成像技术,有望在低成本便携式物联网视觉终端系统中获得广泛应用。针对扩散体无镜头系统成像性能评估工作不足的问题,搭建了基于扩散体的无镜头成像系统,探究了该系统成像模型,使用直接测量法测量了不同条件下该系统的点扩散函数,分析其自相关函数的半高全宽和空间频率响应,评估该系统的成像性能和分辨率。实验结果表明,该系统SFR测量值约为0.030 cycles/pixel,重构图像的峰值信噪比(PSNR)超过12 dB,成像性能良好。
关键词:物联网;无镜头成像;点扩散函数;直接测量法;扩散体;分辨率
中图分类号:TP391 文献标识码:A 文章编号:2095-1302(2025)02-00-03
0 引 言
在过去的几个世纪,透镜的出现大大推动了成像技术的发展,然而,可穿戴设备、植入式设备、机器人、物联网、虚拟/增强现实和人机交互正在推动相机向着小型化发展,但透镜的使用增加了这些设备的重量和成本。
无镜头成像设备中不配置透镜,而是在场景和图像传感器之间放置光学调制器,场景光经过光学调制器调制后,图像传感器采集图像数据,然后使用特定的算法进行图像重建[1]。
扩散体无镜头成像系统的性能可以通过在单点光源照射时的响应来表征[2]。这种响应称为点扩散函数(Point Spread Function, PSF)。系统PSF可以被用来评估成像系统的图像质量,通过分析PSF的特征,可以了解成像系统的分辨率、模糊度、畸变程度等性能指标。
在实际系统成像过程中,由于光学衍射效应、外界噪声等因素的干扰,理论计算得到的点扩散函数与实际系统的输出响应不符。因此,通常需要根据实际系统中的输出响应对成像模型中的点扩散函数进行调整,以获得较好的成像结果,从实际系统中获得输出响应的过程,也称为点扩散函数的测量。现如今测量PSF的方法大致可以分为3类:使用自然场景图像的盲PSF估计[3-5]、使用校准模式的非盲PSF估计[6-8]和使用点状源直接测量PSF[9-12]。文献[5]假设检测到的模糊边缘是模糊之前的阶跃边缘,并且使用一对预测图像和模糊图像来估计PSF。文献[3]提出了另一种基于边缘的方法,该方法使用潜在清晰图像边缘的先验补丁来估计PSF。非盲PSF估计方法使用校准图案作为输入图像来估计PSF[6-8]。文献[5]使用具有最大后验技术的贝叶斯框架来估计PSF。文献[7]设计了一种每个块中都有源泉的棋盘测试图,然后通过解决最小二乘问题来估计PSF。文献[8]使用随机噪声目标来估计PSF。非盲PSF估计技术通常假设空间不变PSF,因此不适合空间可变PSF图像系统。PSF直接测量方法通常使用点状源和特定光学仪器来获取PSF[9-12],这种方法可以克服测量空间变化PSF的弱点。文献[12]使用液晶显示器(LCD)生成点阵图案来测量不同相机区域的PSF。文献[9]提出了一种采用准直氦氖激光器作为放置在无穷远处的点光源进行高信噪比PSF测量的方法。文献[11]使用虚拟点状源实现了子像素PSF的测量。直接测量法更为方便快速,同时更能反映成像模型与实际系统之间的误差。
本文设计了一种基于FPGA硬件平台的扩散体无镜头相机,并且对该系统的PSF进行了测试评估,进而分析了该系统的成像性能和分辨率。
1 扩散体无镜头成像系统架构
扩散体的无镜头成像系统由一个光学传感器、一个扩散体和计算单元组成[13]。本文使用的扩散体是一个较薄的透明相位板,视场中非相干点光源透过该扩散体在传感器上生成伪随机焦散图案h作为PSF,将焦散图案存储到FPGA内存中后,使用传感器采集场景图像获得测量数据l,利用焦散图案和场景图像数据在FPGA中完成图像重构。系统架构如图1所示。
本文将场景建模为具有不同颜色和强度的点光源的集合。假设所有场景中所有点彼此独立,传感器测量值l可以描述为:
(1)
式中:h表示系统PSF;r表示场景;(m, n)表示传感器坐标;“*”表示2D离散线性卷积。可以使用解决以下形式正则化优化问题的方法来恢复图像:
(2)
式中:Ψ表示稀疏变换;τ表示调整稀疏级别的调整参数。该优化问题可以使用交替方向乘子法(Alternating Direction Method of Multipliers, ADMM)解决。
2 扩散体无镜头成像模型
一个点光源发出多条从不同角度入射的子光束,每条子光束透过扩散体在传感器上形成完整焦散图案的一部分,各条子光束形成的焦散图案彼此不同,并且不重叠。所以,完整的焦散图案包含了每条光束的角度信息。同时,扩散体对点光源的响应是横向位移不变的,这意味着平行于扩散体平面的平面中,每个点光源产生唯一的焦散图案。因此光线的位置信息也可以被编码进焦散图案中,换言之,视场中所有光线都可以被唯一编码,从而实现无透镜光场成像。
只考虑场景中的一个点时,就可以定义该位置为在时间间隔Δt内对光强的积分:
(3)
式中:I(m, n)表示扩散体平面(m, n)位置接收到的光强;u(m, n)表示点P的光线在时间t到达(m, n)的光强。然后,这些光线通过扩散体透射模式T照射在传感器上,传感器捕获的测量值为:
(4)
传感器捕获场景中的光可以分解为两个过程:首先点P的场景光透过空间采样平面照射在扩散体上,然后经过扩散体调制照射在传感器上。扩散体成像模型如图2所示。
在第一个过程中,根据薄透镜定律,空间中点
Pi, j=[x, y, z]T∈R3通过采样平面的变换进入到焦点
P'=[x', y', z']T∈R3的位置:
(5)
式中:F为采样平面的焦距。根据相似三角形原理,P'在扩散体平面上的投影Pb为:
(6)
用pillbox函数近似扩散体平面上的模糊,则模糊半径为:
(7)
该过程PSF被定义为:
(8)
(9)
在第二个过程中,扩散体的PSF被定义为:
(10)
当扩散体平行于传感器平面放置,且扩散角θ很小(sinθ≈θ)时,得到:
(11)
式中:α为光场角。接下来,可以得到PSF的半径:
(12)
式中:为图像的放大倍数。
该扩散体无镜头成像系统的PSF被定义为上述两个PSF的乘积:
(13)
传感器在像素(x, y)位置捕获的光照强度为:
(14)
式中:r(P)为空间中各个点光源P的集合。
3 实验与仿真
3.1 实验装置及实验步骤
本实验使用LCD屏幕显示的点充当点光源,利用扩散体、黑色孔径板和除掉镜头的OV5640图像传感器获取点光源的焦散图案。其中孔径板为外宽2 cm、内宽0.2 cm的黑色正方形纸板,图像传感器的有效像素个数为2 592×1 944,像素尺寸为1.4×1.4,传感器尺寸为4 mm。实验装置如图3所示。
本实验旨在探寻该系统成像性能以及点光源与传感器距离对PSF的影响,具体实验步骤如下:
(1)将LCD屏幕同轴放置在传感器前,使屏幕与传感器的距离D=10 cm,在屏幕上显示S=100 pixel的点光源;
(2)捕获传感器上显示的焦散图案,保存在计算机上;
(3)捕获场景图像经过扩散体采集的原始数据;
(4)使用ADMM算法重构点光源图像;
(5)使用MATLAB计算点光源和重构点光源的自相关系数和重构图像的SFR;
(6)改变LCD屏幕与传感器距离,重复上述步骤。
3.2 实验结果及分析
首先测试系统重构点光源的能力。使用的点光源大小为100 pixel,距离为5 cm时,采集的图像如图4所示。其可以作为无镜头系统中的点扩散函数h,也可以作为传感器测量值l。
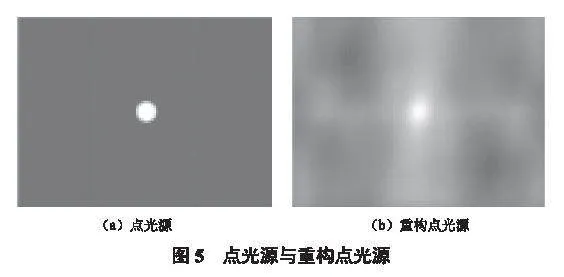
利用采集到的PSF作为测量值l,使用ADMM算法重构点光源图像,点光源与重构点光源如图5所示。
计算距离为5 cm时,重构点光源与原图像的PSNR为13.287 1。利用原点光源图像和重构点光源图像自相关函数计算可知,其半高全宽为172 pixel,重构点光源的SFR测量值为0.035 cycles/pixel。
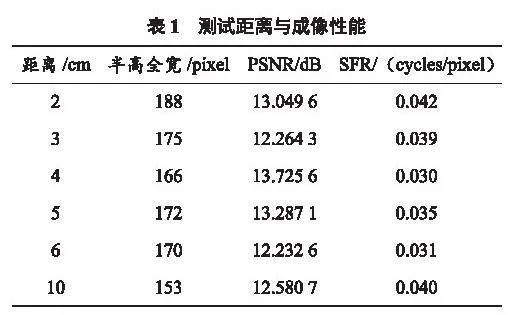
对距离为2 cm、3 cm、4 cm、5 cm、6 cm、10 cm的点光源按上述步骤进行测量,测试距离与成像性能见表1。
实验结果表明,该系统在近距离条件下有着较为良好的成像性能,系统半高全宽约为170 pixel,SFR约为0.030 cycles/pixel,成像PSNR超过12 dB。
4 结 语
本文探究了基于扩散体的无镜头成像系统的成像模型,搭建了成像系统平台,测试了不同条件下系统点扩散函数的成像性能,评估了扩散体无镜头成像系统的分辨率大小。实验结果表明,该系统点扩散函数采集距离为4 cm时成像性能最佳,PSNR接近14 dB,系统SFR测量值在0.030 cycles/pixel左右,有着良好的成像效果。但是该系统成像性能还有很大提升空间,可以在本文基础上加入图像信号处理系统,对采集的PSF信号做优化处理,再进行图像重构,以达到更好的成像效果。
参考文献
[1] BOOMINATHAN V, ROBINSON J T, WALLER L, et al. Recent advances in lensless imaging [J]. Optica, 2022, 9(1): 1-16.
[2] JIANG H Z, LIU Y C, LI X D, et al. Point spread function measurement based on single-pixel imaging [J]. IEEE photonics journal, 2018, 10(6): 1-15.
[3] SUN L B, CHO S H, WANG J, et al. Edge-based blur kernel estimation using patch priors [C]// IEEE International Conference on Computational Photography. Cambridge, MA, USA: IEEE, 2013: 1-8.
[4] CHO T S, PARIS S, HORN B K, et al. Blur kernel estimation using the radon transform [C]// IEEE Conference on Computer Vision and Pattern Recognition. Colorado Springs, CO, USA: IEEE, 2011: 241-248.
[5] JOSHI N, SZELISKI R, KRIEGMAN D J. PSF estimation using sharp edge prediction [C]// IEEE Conference on Computer Vision and Pattern Recognition. Anchorage, AK, USA: IEEE, 2008: 1-8.
[6] MOSLEH A, GREEN P, ONZON E, et al. Camera intrinsic blur kernel estimation: a reliable framework [C]// IEEE Conference on Computer Vision and Pattern Recognition. Boston, MA, USA: IEEE, 2015: 4961-4968.
[7] KEE E, PARIS S, CHEN S, et al. Modeling and removing spatially-varying optical blur [C]// IEEE International Conference on Computational Photography. Pittsburgh, PA: IEEE, 2011: 1-8.
[8] BRAUERS J, SEILER C, AACH T. Direct PSF estimation using a random noise target [J]. Proceedings of SPIE, 2010, 7537(75370B).
[9] DU H, VOSS K J. Effects of point-spread function on calibration and radiometric accuracy of CCD camera [J]. Applied optics, 2004, 43(3): 665-670.
[10] LEHR J, SIBARITA J B, CHASSERY J M. Image restoration in X-ray microscopy: PSF determination and biological applications [J]. IEEE transactions on image processing, 1998, 7(2): 258-263.
[11] JEMEC J, PERNU S F, LIKAR B, et al. 2D sub-pixel point spread function measurement using a virtual point-like source [J]. International journal of computer vision, 2017, 121(3): 391-402.
[12] NAVAS-MOYA F A, NIEVES J L, VALERO E M, et al. Measurement of the optical transfer function using a white-dot pattern presented on a liquid-crystal display [J]. Journal of the European optical society rapid publications, 2013, 8(13029).
[13] CAI Z W, CHEN J W, GIANCARLO P, et al. Lensless light-field imaging through diffuser encoding [J]. Light: science amp; applications, 2020, 9(5): 1392-1400.
作者简介:刘明昊(1998—),男,广东深圳人,硕士,研究方向为计算成像。
收稿日期:2024-01-18 修回日期:2024-03-06
猜你喜欢
自动化学报(2019年6期)2019-07-23 01:18:32
数学物理学报(2019年3期)2019-07-23 01:15:40
家庭影院技术(2018年9期)2018-11-02 05:31:32
自动化学报(2017年5期)2017-05-14 06:20:52
成都信息工程大学学报(2017年6期)2017-03-16 03:04:32
中国科技博览(2016年19期)2016-10-19 14:58:22
电脑知识与技术(2016年21期)2016-10-18 22:33:02
中国新通信(2016年16期)2016-10-18 11:00:54
科学与财富(2016年28期)2016-10-14 01:24:06
环球时报(2016-08-01)2016-08-01 07:04:45
