基于双目视觉的变电站巡检机器人故障点定位方法
2024-12-31 00:00:00孙锦钊慕爱东孙梦阳
今日自动化 2024年9期
关键词:变电站



[摘 要]由于变电站通常位于偏远地区,其运行环境较为恶劣,实际运行中设备与线路故障时有发生,故提出基于双目视觉的变电站巡检机器人故障点定位方法。在巡检机器人上搭载双目摄像机,基于双目视觉技术获取变电站故障点的巡检图像,预处理所获取的变电站巡检机器人故障点双目图像,对预处理后的双目图像中目标故障点进行立体匹配,获得故障点定位结果。实验结果表明,设计方法下变电站巡检机器人故障点定位结果的相对误差仅0.84%,定位精度较高。
[关键词]双目视觉;变电站;巡检机器人;故障点;定位方法
[中图分类号]TM63 ;TP242.6 ;TF089 [文献标志码]A [文章编号]2095–6487(2024)09–0179–03
我国变电站通常位于较为偏远的地区,日常运行中存在严重安全隐患,其巡检工作至关重要,通过巡检准确定位故障点可帮助运维人员迅速找到并修复故障,从而缩短故障停电时间,提高电力系统的可靠性。传统变电站巡检工作主要依赖人工方式,存在巡检周期长、效率低下、故障点定位精度较差等问题,而开发一种智能化的变电站故障点定位方法,对于提高变电站的巡检效率、降低巡检成本、保障电力系统的安全稳定具有重要意义。
近年来,已有较多学者对变电站巡检机器人故障点定位方法进行了研究,例如,文献[1] 中,为提升变电站智能巡检效率与准确率,引入图神经网络对二次回路故障点进行定位,图神经网络复杂性较高,在面对复杂的变电站二次回路结构时,可能难以保障故障点定位精度;文献[2] 中,将CEEMD 和PSD 算法结合在一起进行变电站电力电缆故障点定位,可解决现有FDR 方法下故障点定位误差较大的问题,但该方法对噪声较为敏感,实际应用中如果变电站噪声水平较高,会影响故障点定位的准确性。
针对现有研究成果的局限之处,文章提出一种基于双目视觉的变电站巡检机器人故障点定位方法,期望可为变电站的预防性维护提供可靠数据支持,以降低变电站故障发生的概率。
1 基于双目视觉获取变电站故障点巡检图像
为提升变电站故障点的定位效率,文章通过在变电站内设置巡检机器人执行巡检任务,并在机器人巡检过程中,搭载双目摄像机,实时采集变电站故障点的巡检图像。一般来说,当巡检机器人身上搭载双目摄像机后,这两个摄像机之间的距离是已知且固定的,通过双目相机模拟人类双眼的视差,即可实现对变电站故障点的立体感知。采用巡检机器人搭载双目摄像机对变电站故障点图像进行采集时,关键在于双目立体视觉模型的建立,假设变电站三维空间内某故障点在双目相机坐标系下的位置坐标分别为(XL,YL,ZL)、(XR,YR,ZR),将该三维坐标点投影至平面上,得到双目图像上对应像素坐标分别为(xL,yL)、(xR,yR),那么根据二者之间的关系构建双目立体视觉模型数学表达式如下所示:
式中,(uL,vL)、(uR,vR)分别为双目立体视觉模型中图像像素的左、右坐标系,(u1,v1)为双目图像的实际坐标点,F为平移向量,f为双目摄像机的焦距,D为双目摄像机的视差。
文章基于上述双目视觉原理,即可通过模拟人类双眼的视差原理,实时获取具有视差的变电站故障点双目巡检图像,在该双目巡检图像中包含了变电站内故障点的深度信息,可为后续故障点定位提供重要的数据基础。
2 预处理变电站巡检机器人故障点双目图像
在变电站内巡检机器人巡检过程中,受巡检环境与双目摄像机自身精度等因素影响,原始获取的故障点双目图像存在一定质量问题,所以为提升故障点定位精度,在定位之前需要对双目图像做一系列预处理。
(1)为减少计算量并提高图像处理速度,文章对原始变电站巡检机器人故障点双目图像做灰度化处理,也就是将彩色图像转化为灰度图像,灰度图像是仅包含亮度信息的图像,其像素值范围通常为0~255,有利于后续处理,具体处理公式如下式所示:
式中,H(x,y)为灰度变电站巡检机器人故障点双目图像,r(x,y)、g(x,y)、b(x,y)分别为原始彩色双目图像的红、绿、蓝3个颜色分量。
文章采用式(3)所示的平均值法,将彩色双目图像转化为灰度图像。
(2)为增强图像对比度,对变电站巡检机器人故障点双目图像做直方图均衡化处理,也就是通过拉伸图像的像素强度分布范围,使其更加均匀,从而增强图像的视觉效果,其表达式如下式所示:
式中, 为均衡化处理后的变电站巡检机器人故障点双目图像灰度值,si为双目图像中灰度级为i的像素点数量,S为双目图像中像素点总数量,h为双目图像的灰度级数。
通过式(4)的预处理,变电站巡检机器人故障点双目图像的对比度可以增强,细节信息更加突出。
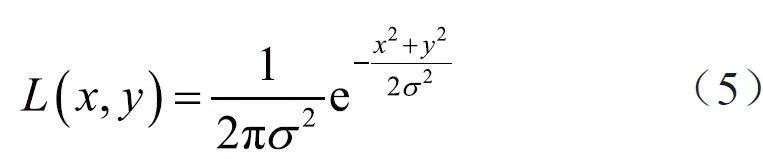
(3)为去除变电站巡检机器人故障点双目图像中噪声,引入高斯函数,对原始双目图像做平滑处理,表达式如下式所示:
式中,L(x,y)为高斯滤波后变电站巡检机器人故障点双目图像,σ为高斯函数标准差。
通过式(5)对原始变电站巡检机器人故障点双目图像做平滑处理,即可有效去除图像中噪声,实现滤波去噪目的。
3 定位双目巡检图像中目标故障点
在获取并预处理了变电站巡检机器人故障点双目图像后,基于双目图像的视差即可进行目标故障点的定位。
(1)为找出两幅变电站巡检机器人故障点图像中目标故障点的对应位置关系,需要对预处理后的双目图像进行立体匹配,立体匹配即对两幅图像的特征描述子进行相似性匹配。为获得特征描述子,引入SIFT 特征提取算法。生成描述子的步骤为,在高斯尺度空间内,将关键特征点的邻域划分为多个尺寸为C×C 的子区域,每一个子区域均存在8 个方向,所以实际过程中需要找到关键特征点的主方向,并确保其坐标轴具有旋转不变性,再将各个子区域内的图像像素点梯度值一一分配到这8 个方向上,即可获取原特征像素点(x,y)落在子区域后的坐标值,具体计算公式如下式所示:
式中,l为各子区域的边长。
根据式(6)确定了原特征关键点落在各个子区域后的坐标点后,对各坐标点进行线性插值,即可获取各个种子点在8 个方向上的梯度,根据这些梯度信息形成关键特征点的特征向量,并根据特征点尺度对特征向量进行排序,以此生成变电站巡检机器人故障点双目图像的特征描述子。
(2)根据基于欧氏距离的相似性度量函数来衡量两幅图像的特征描述子之间相似程度,选择相似程度较高的特征点进行匹配,以完成变电站巡检机器人故障点双目图像的立体匹配,并根据匹配像素点坐标计算视差,表达式如下式所示:
D'=x'L-x'R(7)
式中,D' 为变电站巡检机器人故障点双目图像的视差值,x'L 、x'R分别为双目图像匹配点的横坐标。
将各对应像素点视差值组合在一起,生成变电站巡检机器人故障点双目图像的视差图,再结合双目相机的几何参数和视差信息即可计算出故障点的深度信息,表达式如下式所示:
式中,T为深度值,δ为基线距离。
对于视差图中的每个像素点,都可以根据式(8)计算出其对应的深度值。
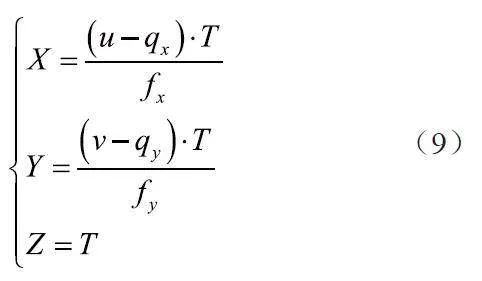
(3)根据故障点深度值计算故障点在三维空间中的坐标数据,表达式如下式所示:
式中,(X,Y,Z)为故障点的三维坐标,(u,v)为双目图像中故障点的坐标,fx、fy为X、Y方向上的焦距,qx、qy为X、Y方向上的图像中心点坐标。
因此,文章根据变电站巡检机器人故障点双目图像,即可获取故障点在实际三维空间中的坐标信息,以此实现故障点定位。
4 仿真试验
4.1 试验设置
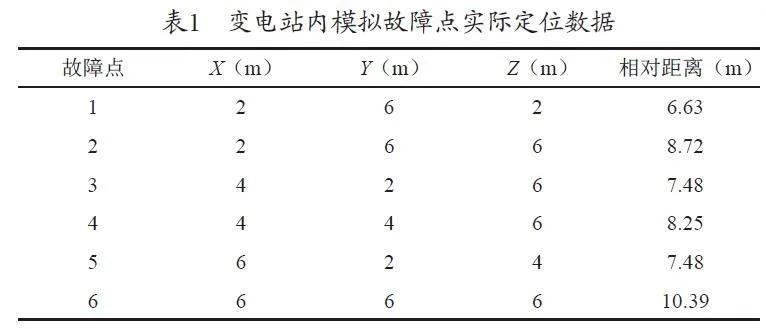
以文章方法作为试验组,并以文献[1] 方法和文献[2] 方法作为对照组,展开变电站内故障点定位的仿真对比试验。在配备Intel Core i7处理器和NVIDIAGeForce RTX 3060 显卡的计算机上,使用MATLAB和OpenCV 库搭建本次变电站内故障点定位的仿真试验环境。在该仿真试验环境中,设置6 个已知位置模拟故障点,变电站内模拟故障点实际定位数据见表1。
分别采用文章设计方法、文献[1] 方法和文献[2]方法,对表1 所示6 个模拟故障点进行定位测距,并对比所得定位测距结果。
4.2 结果分析
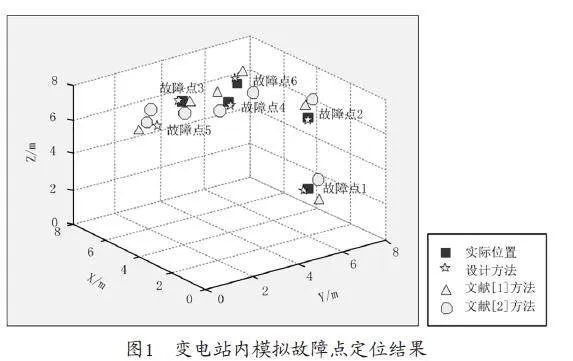
在本次仿真对比试验完成后,先统计文章设计方法、文献[1] 方法和文献[2] 方法下各模拟故障点的三维坐标定位数据,与实际三维坐标一起绘制成如图1 所示的变电站内模拟故障点定位结果。
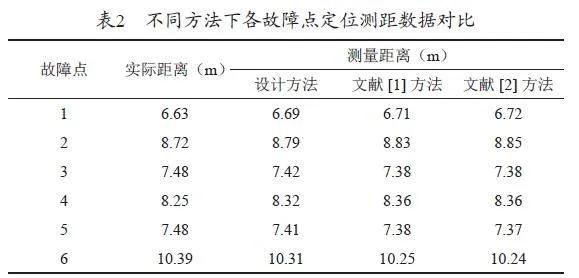
分析图1 可知,在变电站内8 个已知位置的模拟故障点定位中,与对照组方法相比,文章设计方法下三维坐标定位结果和实际数据之间更接近,说明文章设计方法能够更准确获取故障点的三维坐标。为更客观且直观地体现文章设计方法的优越性,根据各模拟故障点的三维坐标定位数据,分别计算出故障点的相对距离,作为测距结果,与模拟故障点的实际距离进行对比,见表2。
如表2 所示,在文章设计方法下,变电站内各模拟故障点的定位测距结果与实际相对距离之间的相对误差均在1% 之内,平均相对误差为0.84%,较对照组中两种方法分别降低了0.47%、0.57%。由此可以说明,文章所设计基于双目视觉的变电站巡检机器人故障点定位方法是有效且正确的,可在实际变电站故障定位中表现出较高的精度。
5 结束语
文章深入研究了一种基于双目视觉的变电站巡检机器人故障点定位方法,该方法通过巡检机器人搭载双目相机实时采集变电站故障点的巡检图像,经过预处理后对所得双目巡检图像进行立体匹配,即可实现对变电站内故障点的精确定位。与此同时,文章通过仿真对比试验验证了设计方法的有效性和优越性,能够为变电站巡检机器人的实际应用提供更为可靠的技术支持。未来,将进一步完善该方法,提高其在复杂环境下的适用性和鲁棒性,为智能电网的可持续发展作出贡献。
参考文献
[1] 张宸滔,郑永康,卢继平,等. 基于图神经网络的智能变电站二次回路故障定位研究[J]. 电力系统保护与控制,2022,50(11):81-90.
[2] 温才权,韦鑫,王杰,等. 基于CEEMD-PSD 算法的变电站控制电缆故障定位方法[J]. 电网与清洁能源,2023,39(7):80-89.
猜你喜欢
电子制作(2019年10期)2019-06-17 11:44:56
电子制作(2018年8期)2018-06-26 06:43:34
电子制作(2017年8期)2017-06-05 09:36:15
电子制作(2017年24期)2017-02-02 07:14:44
现代工业经济和信息化(2016年5期)2016-05-17 05:35:57
东北电力技术(2016年2期)2016-05-17 04:32:54
河南电力(2015年5期)2015-06-08 06:01:45
中国工程咨询(2015年10期)2015-02-14 05:57:34
水电站机电技术(2014年1期)2014-09-26 11:59:53
中国机械(2014年15期)2014-04-29 00:09:45