桁架式机器人视觉巡检系统设计
2024-12-31 00:00:00王富春张栩涛梁云
科技创新与应用 2024年21期
基金项目:2019年度广西高校中青年教师科研基础能力提升项目(2019KY1270);柳州职业技术学院2023年校级科研一般课题(2023KB08)
第一作者简介:王富春(1979-),男,硕士,副教授。研究方向为智能装备技术。
*通信作者:张栩涛(1993-),男,硕士,讲师。研究方向为工业机器人技术。
DOI:10.19981/j.CN23-1581/G3.2024.21.011
摘" 要:针对当前智能制造装备存在传感器监测盲区且人工点检效率低、易出错的现状,设计一套桁架式移动机器人视觉巡检系统,实现自动监测生产线设备上电气、机械关键部位易松动易错位等问题。该系统安装在生产线上方,具有可达范围广、无拍照死角、适用场景广和不影响生产线设备动作等优点,解决传统地面移动巡检机器人占用生产线空间、拍照角度受限、无法进入复杂生产线内部点检等缺点。在智能制造技术升级的背景下,该系统具有较高的实用价值及推广意义。
关键词:视觉检测;自动巡检;巡检机器人;智能制造;生产线
中图分类号:TP242" " " 文献标志码:A" " " " " 文章编号:2095-2945(2024)21-0044-04
Abstract: Aiming at the current situation of sensor monitoring blind spots and low efficiency and error prone manual inspection in intelligent manufacturing equipment, a gantry robot visual inspection system has been designed. This system aims to achieve automated monitoring of electrical and mechanical critical points prone to loosening or misalignment on production line equipment. Installed above the production line, the system offers advantages including wide coverage, no blind spots in photography, versatile applicability, and no interference with production line equipment movements. The shortcomings of traditional ground-based inspection robots, such as occupying production line space, restricted photography angles, and inability to perform inspections within complex production line internals are solved. In the context of intelligent manufacturing technology upgrading, the system has high practical value and popularizing significance.
Keywords: visual inspection; automatic inspection; inspection robot; intelligent manufacturing; production line
随着汽车、电子等制造业信息化、数字化、智能化不断升级,特别是生产制造现场普遍推进“机器人换人”的发展趋势下,设备的运行管控以及保障变得越来越重要,通常生产现场的监控系统数据主要来源于现场数字化、智能化设备系统或现场布置的相关传感器,通过收集诸如电流、电压、压力以及相关参数从而判别当前生产设备的运行状态,而对于现场诸如线束磨损、相关工装夹具的位置变化等类似故障率较高的故障源缺乏有效的智能化监控,往往执行的是故障发生后的事后维修,容易造成设备停机或生产质量精度降低甚至不合格等不良后果。
本文设计了一套桁架式移动机器人视觉巡检系统,该系统采用桁架机器人搭载工业视觉,监测工业机器人生产线等设备上电气、机械易松动、错位等关键部位,通过图像处理判别故障源并提前提出预警,实现设备的预防性维修,具有模块化设计、适用场景多、检测效率高等特点,解决了当前制造业企业生产设备运行过程中常规传感器无法监控的盲区问题。
1" 系统的构成及工作过程
1.1" 系统的组成
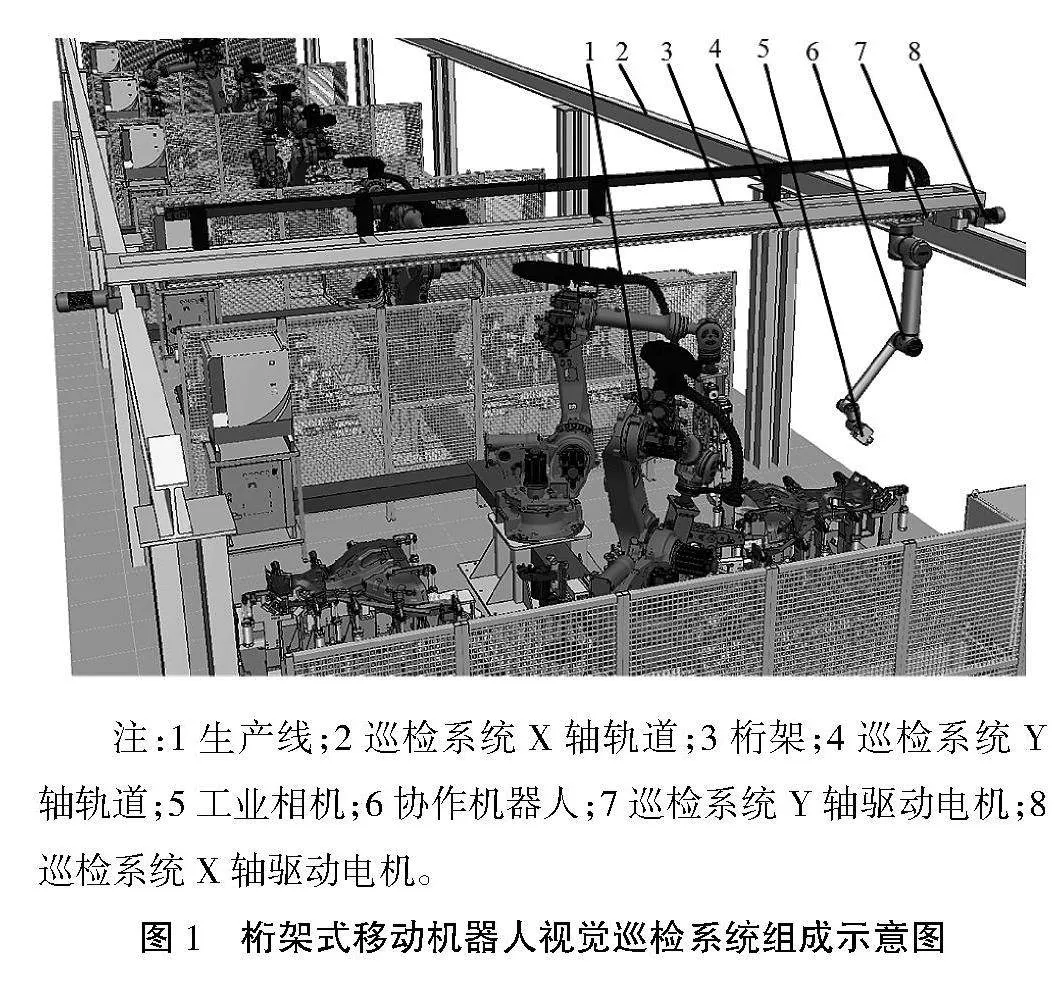
由于生产现场地面往往布置有生产装备以及配套的控制柜、物流架、起物流搬运作用的移动机器人,不便于布置运维监控机器人,而且工业机器人生产线大部分线束、工装夹具等组成部分需要一定的高度才能拍摄监控,地面布置的移动机器人难以有效抓取图像,因此采用协助机器人配合工业视觉的方式实现桁架高空循环监控模式。桁架式移动机器人运维系统由桁架、桁架驱动系统、协作机器人和工业视觉系统等组成,如图1所示。
搭载工业相机的协作机器人在桁架上的导轨移动,在避开工业机器人运动轨迹的前提下,通过变换各个拍摄角度实现对生产线运行设备上的线束、工装夹具等依次拍摄图像,控制系统通过图像内的目标位置变化、状态变化判断目标的好坏以及预判目标的变化趋势,从而显示目标状态并给出相应的预防维修建议,实现生产线运行的监控和预防维修。
1.2" 巡检机器人可达性验证
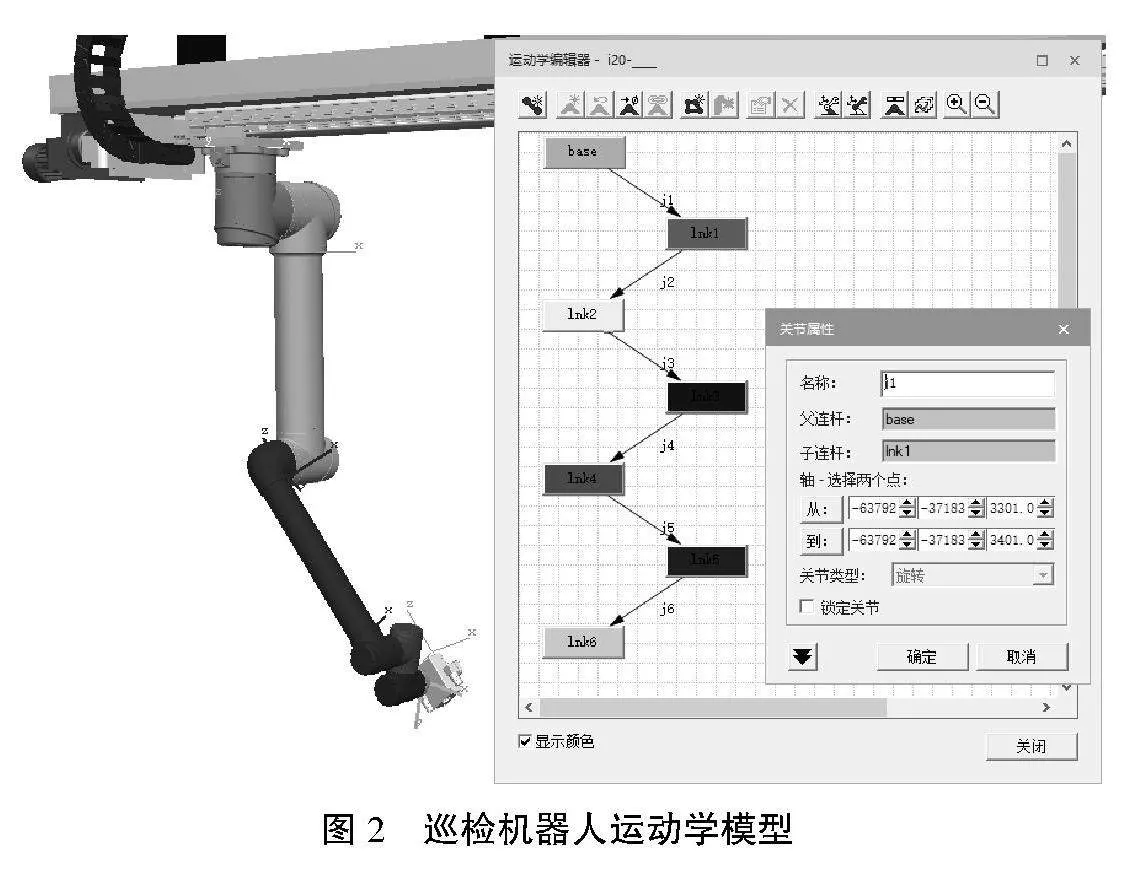
为验证巡检机器人的巡检可达性,使用Proces Simulate软件对现有生产线设备进行三维仿真环境搭建。并进行巡检机器人运动学建模,对巡检机器人创建6个旋转约束J1—J6,分别对应巡检机器人的6个旋转关节,如图2所示。
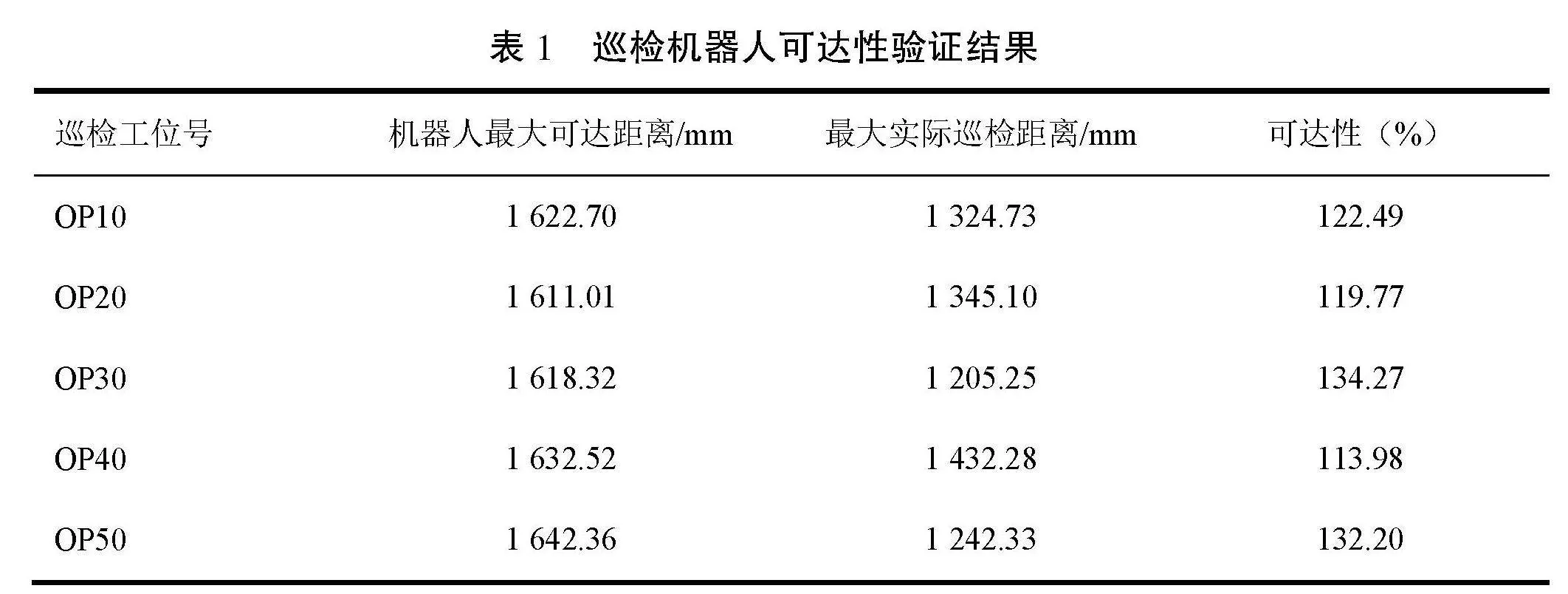
根据每个工位的巡检需求,对生产线进行巡检仿真,仿真结果见表1。其中机器人最大可达距离指机器人在该工位巡检拍照姿态下的末端可达的最远距离,机器人最大可达距离受机器人拍照角度影响,因此每个巡检点的机器人最大可达距离不相同。最大实际巡检距离是巡检机器人进行巡检任务时需要达到的拍照点距离,巡检机器人可达性定义为机器人最大可达距离/最大实际巡检距离,可达性大于100%表明该位置可达。根据巡检机器人可达性仿真结果:OP10工位最大实际巡检距离为1 324.73 mm,该工位巡检机器人最大可达距离为1 622.70 mm,因此该工位巡检机器人可达性为122.49%;OP20工位最大实际巡检距离为1 345.10 mm,该工位巡检机器人最大可达距离为1 611.01 mm,因此该工位巡检机器人可达性为119.77%;OP30工位最大实际巡检距离为1 205.25 mm,该工位巡检机器人最大可达距离为1 618.32 mm,因此该工位巡检机器人可达性为134.27%;OP40工位最大实际巡检距离为1 432.28 mm,该工位巡检机器人最大可达距离为1 632.52 mm,因此该工位巡检机器人可达性为113.98%;OP50工位最大实际巡检距离为1 242.33 mm,该工位巡检机器人最大可达距离为1 642.36 mm,因此该工位巡检机器人可达性为132.20%;综上所述,该巡检机器人可以覆盖生产线5个工位的巡检点。
2" 控制系统设计
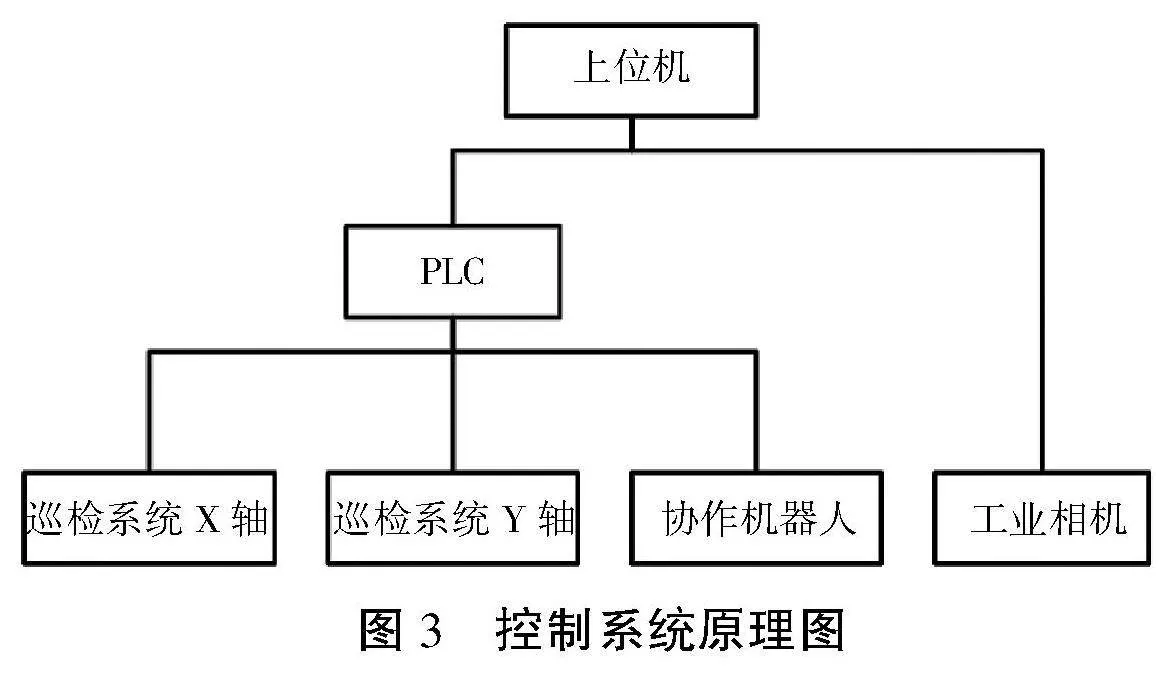
巡检控制系统是桁架式移动机器人视觉巡检系统的核心,由上位机作为总控单元,实现对协作机器人、工业相机、巡检系统X轴轨道伺服电机、巡检系统Y轴轨道伺服电机等硬件的控制,其系统原理图如图3所示。
2.1" 巡检系统硬件设计
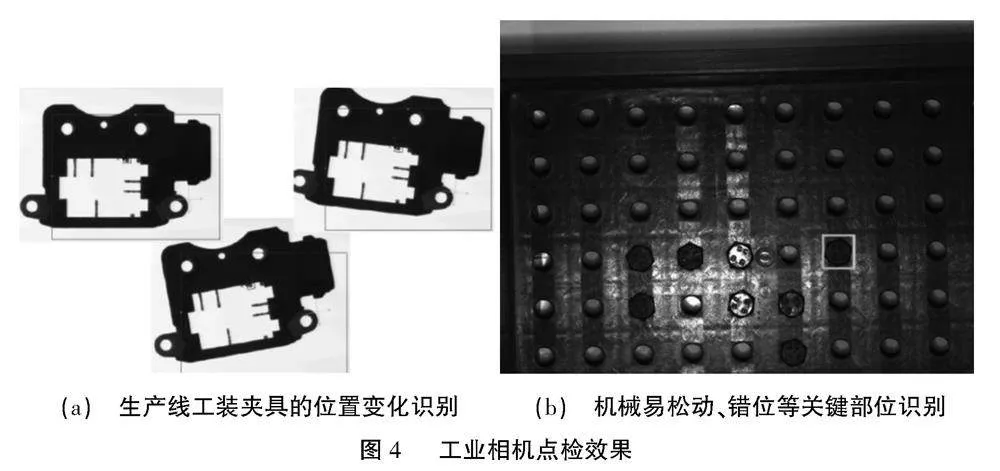
1)基于工业机器人生产线现场的图像抓取及识别需求,采用3D主动双目工业相机,分辨率12 MP,结构光编码方式:二进制格雷码,XY/Z方向测量精度为0.19~0.25 mm/0.1 mm。可实现对生产线工装夹具的位置变化识别如图4(a)所示,以及机械易松动、错位等关键部位识别如图4(b)所示。
2)基于图像采集对象的运动轨迹变化,需要从不同角度针对目标点进行图像拍摄,采用6轴协作机器人,最大工作半径1 650 mm,负载20 kg,重量63 kg,重复定位精度±0.1 mm,采用Modbus-TCP通信方式,可有效地变化角度和位置抓拍目标点。
3)由于采集图像的目标是生产线,其工作范围较大,且需要配合运动中的工业机器人进行位置定位,采用巡检系统X/Y轴带动安装在桁架上协作机器人,由伺服电机驱动巡检系统桁架X/Y轴,实现协作机器人的大范围移动巡检。
4)巡检过程的所有流程控制,使用PLC可编程控制器与上位机及协作机器人通信,完成对巡检系统桁架X/Y轴伺服电机控制、对巡检结果做逻辑判断等功能。
2.2" 巡检系统流程设计
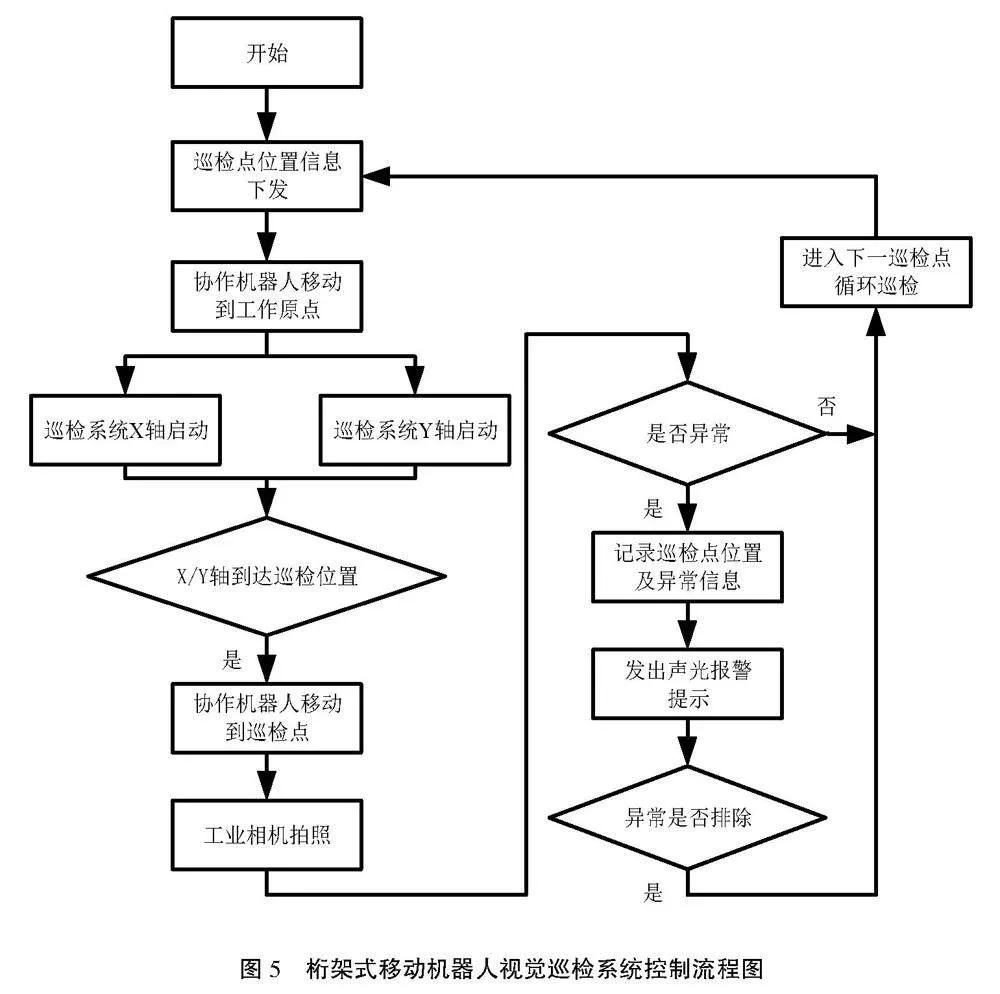
在自动巡检模式下,桁架式移动机器人视觉巡检系统按照设定的巡检逻辑开始对生产线进行巡检监控,其控制流程如图5所示。
巡检系统开始运行前,根据生产线巡检要求录入生产线的巡检位置点、巡检类型及巡检要求,系统开始运行后,巡检系统将第一个位置点、巡检类型及巡检要求信息下发给PLC及协作机器人,协作机器人首先回到工作原点,巡检系统X/Y轴伺服电机启动,根据巡检位置点移动到对应的X/Y轴位置值,X/Y轴到达巡检点位置值后,协作机器人移动到对应的巡检拍照点,触发工业相机拍照上传到上位机进行图像识别,根据图像识别结果决定是否触发异常报警。若巡检识别结果为正常,则自动进入下一巡检点进行循环点检,若巡检识别结果为异常则记录巡检点位置信息及异常信息,并发出声光报警提示,当异常排除后自动进入下一巡检点进行循环点检。
3" 结论
针对目前制造业生产现场的生产线等设备在运行过程中存在大部分无法使用传感器进行检测的故障源部位,采用工业机器人、工业视觉以及图像处理技术设计桁架式移动机器人巡检系统,解决盲区监控的问题,并能有效地提前预判故障的发生,实现生产现场的预防性维修,降低设备的故障率及停机率,提高设备的使用效率,具有模块化设计、柔性化程度高、检测效率高等特点,适用于焊接、涂装、搬运等工业机器人生产线,避免高温、有毒、危险等工作环境。在智能制造技术升级的背景下,该系统具有较高的实用价值及推广意义。
参考文献:
[1] 王满,吴功平,熊一飞,等.巡检机器人自动上下线系统制动装置研究[J].机床与液压,2020,48(9):1-4.
[2] 马丽娜.基于PLC的消防自动巡检系统的设计与研究[J].中国设备工程,2022(2):98-99.
[3] 蓝青.火力发电厂输灰带式输送机廊道智能巡检系统的设计及应用[J].中国高新科技,2023(8):84-87.
[4] GUO W, WANG H, JIANG Y, et al. Obstacle Navigation Planning for a Power Transmission Line Inspection Robot[J].Robot, 2012,34(4):505-512.
[5] 侯卫卫.大数据下的远程设备智能检测系统设计[J].无线互联科技,2022,19(7):60-61.
[6] 李梁,刘帅,李国波,等.变电站智能巡检机器人监控系统设计与实现[J].微型电脑应用,2013(5):32-35.
猜你喜欢
今日农业(2021年13期)2021-11-26 11:50:54
锻压装备与制造技术(2021年2期)2021-07-19 08:50:44
电线电缆(2018年3期)2018-06-29 07:41:04
现代企业文化(2016年1期)2016-12-23 02:09:39
世界制造技术与装备市场(2015年6期)2015-02-28 22:20:24
有色金属设计(2015年2期)2015-02-28 21:08:59