基于STM32的小车跟随行驶系统设计
2024-12-31 00:00:00徐昊何远纲
现代信息科技 2024年10期



摘" 要:跟随行驶系统是一种连续性跟踪并检测运动目标轨迹参数的系统。小车的跟随行驶系统可以提供跟随目标的空间定位运动轨迹,不需要过多的人为控制,实现了自动化、智能化。该系统由跟随小车和循迹小车两部分组成,主要包括红外传感模块、超声波距离检测模块、电机驱动模块、电源模块。采用STM32F103单片机作为小车主要控制芯片,通过PWM技术对运动速度以及舵机的方向进行控制。超声波测距模块用于感应跟随物体的位置,控制跟随小车与物体之间的距离,使小车可以在检测到物体停下时停止运动,防止发生碰撞。
关键词:空间定位;循迹;超声波测距
中图分类号:TP368" " 文献标识码:A" 文章编号:2096-4706(2024)10-0194-05
Design of STM32-based Trolley Following Driving System
XU Hao, HE Yuangang
(School of Information Engineering, Chongqing Electric Power College, Chongqing" 400053, China)
Abstract: The following driving system is a system that continuously tracks and detects the trajectory parameters of moving targets. The following driving system of the trolley can provide spatial positioning motion trajectory of the followed target, no need for excessive human control and achieving automation and intelligence. The system consists of two parts: a following trolley and a tracking car, mainly including an infrared sensing module, an ultrasonic distance detection module, a motor drive module, and a power module. The STM32F103 Single-Chip Microcomputer is used as the main control chip for the trolley, and PWM technology is used to control the motion speed and direction of the servo. The ultrasonic ranging module is used to sense the position of the followed object, control the distance between the following trolley and the object, so that the car can stop moving when an object is detected to stop, and prevent collisions.
Keywords: spatial positioning; tracking; ultrasonic ranging
0" 引" 言
随着目前社会经济的不断发展,各式各样的科学技术在各个行业展现他们特有的魅力,智能小车作为现代的新发明,是以后发展的主要方向,智能小车可以在设定好的程序中根据指定的命令完成既定的要求,不需要过多的人力干扰,减轻人们的劳动强度,降低成本。在市场上的智能小车种类功能也呈现出多样性[1],不再仅仅用在科学勘探方面,也常常出现在我们的生活工作之中。智能小车跟随系统的研发在很久之前就提出了概念,在国内外市场上也有过这方面产品的售卖,但无一不是价格昂贵。在目前,大多数的智能小车也只是实现了按照设定位路线行驶和手动遥控操作的基本功能,很少出现具有跟随功能的智能小车。小车跟随行驶系统是指在自动跟随智能小车在开启跟随模式时,能够自动识别出被跟随物体的所在方位,利用核心控制系统及跟随控制系统对被跟随物体进行一定距离的自动跟随的系统,是基于机械结构、计算机技术及自动控制原理设计运行控制的系统。
1" 系统方案
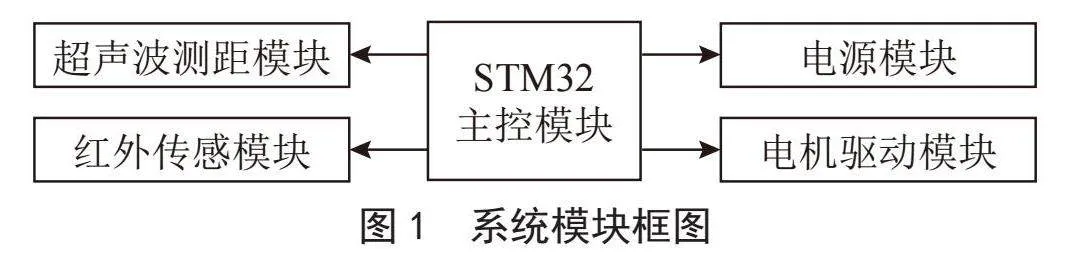
整个小车跟随系统分为主控模块、红外传感模块、超声波距离检测模块、电机驱动模块、电源模组成。各模块的系统框图如图1所示。
2" 硬件模块方案
2.1" 主控模块
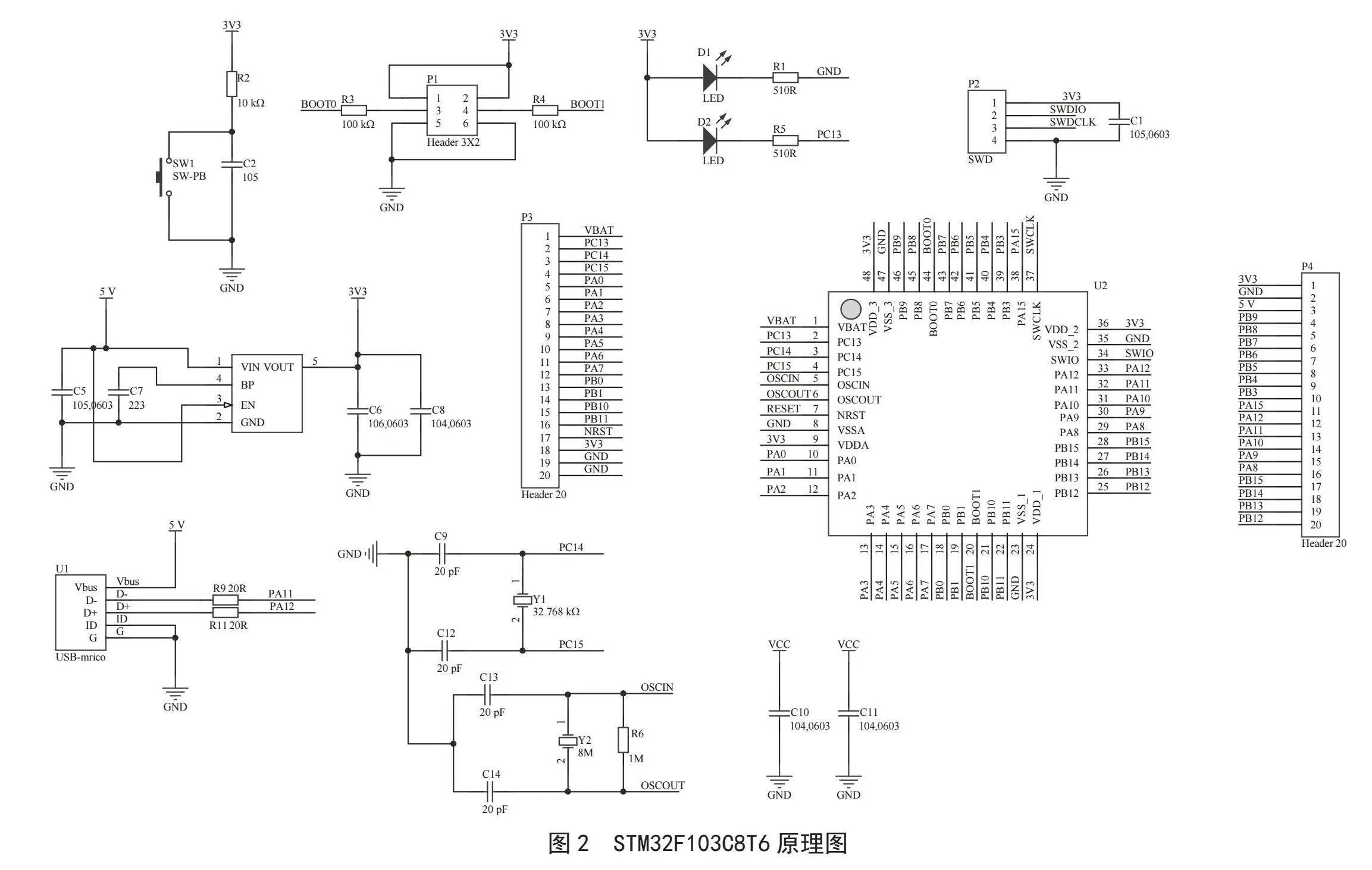
本次的系统模块选用STM32F103C8T6作为小车跟随行驶系统的主控芯片,STM32F103C8T6是一款基于Cortex-M3内核的32位微控制器,跟随小车需要进行实时定位跟踪、电机控制管理、处理信号等任务,需要较高性能的DSP处理器来实现功能,而STM32F103C8T6的优点便是资源齐全、高性能、低成本、低功耗。程序储存器容量是64 KB,具有72 MHz的主频,可以提供高性能的计算和处理能力,支持各种高效算法。因此,该芯片是制作跟随系统的最优选择,STM32F103C8T6原理图如图2所示。
2.2" 红外传感模块
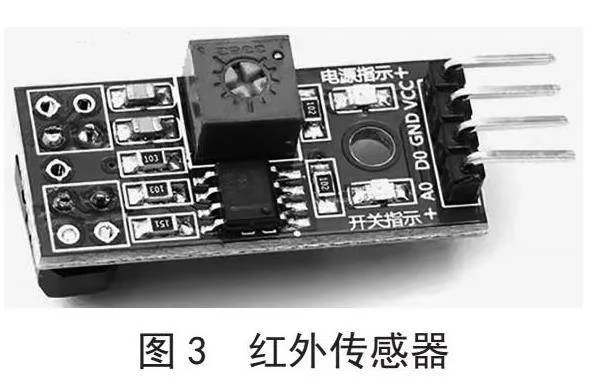
传感器模组对外界光线具有较好的适应性,在模组上有一对红外发射和接收管,白的是发射管,黑的是接收管[2]。在电源启动的时候,发射管发出一定频率的红外光,红外光反射回的信号在探测距离内碰到反射面时,就会被接收管接收,经过比较器电路处理后,反射回的红外光信号会在电路板上的绿色指示灯点亮电平,与此同时,信号的输出口也会输出一个低电平信号。在必要时,可转动组件上的电位器,实现对探测范围的调节[3]。正向调整,检测距离增加;反向调整,检测距离减少。有效探测距离为2~30 cm,调整范围不能超出此范围,探测角度35°,工作电压3.3~5 V。其优点是干扰小,组装简单,使用方便。由于感测器以红外反射为主,所以在使用模组时,必须考虑到物体的反射性及外形。其中,黑色的探测范围最小,而白色的探测范围最大;小区域目标小,大区域目标大。比较器是采用的LM393,工作较为稳定。通过测试表明,它可以采用3~5 V直流电源对其供电。传感器模块及内部电路如图3、图4所示。
2.3" 超声波距离检测模块
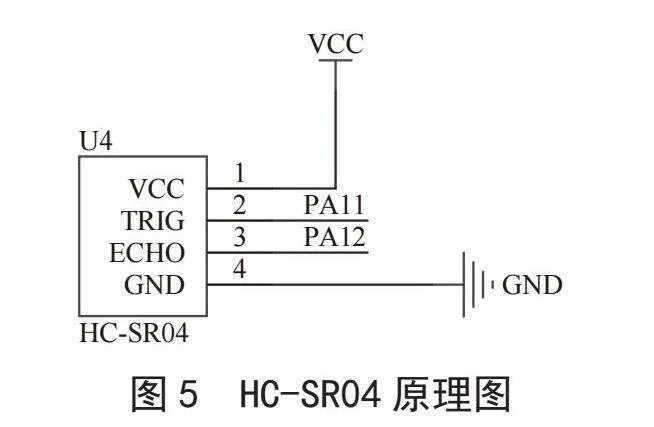
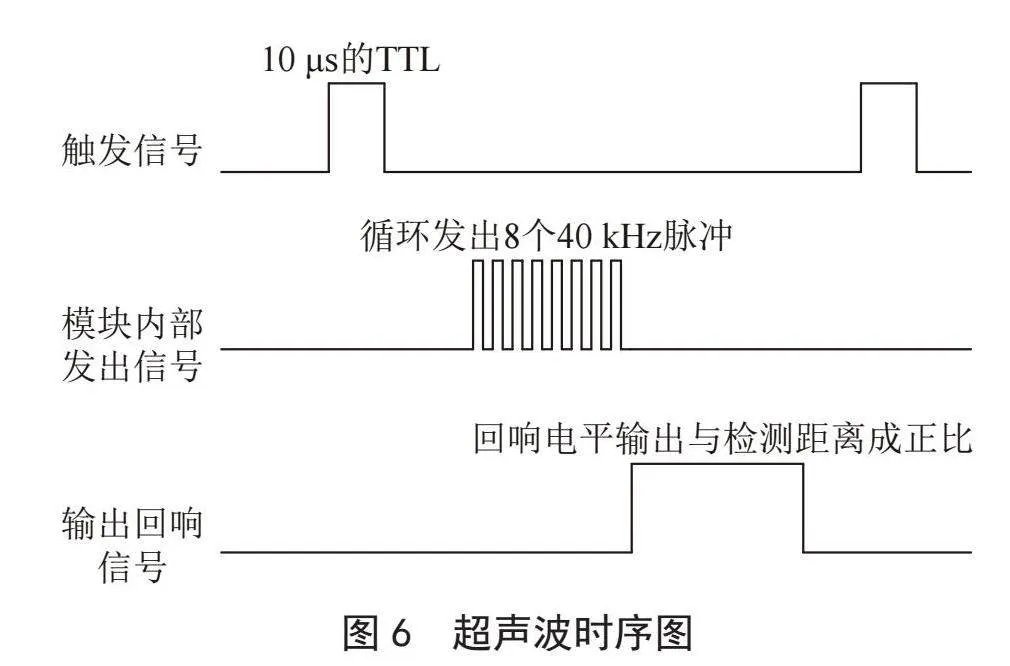
HC-SR04超声波测距模块,采用IO触发测距,至少10 μs的高电平信号。其工作原理是利用超声波在空气中的传播速度来实现。当一个高电平信号被触发器接收后,模块将产生8个40 kHz的超声周期。当超声波作用在一个物体上时,它将被反射回来,并由“Echo”这个装置的回音针来接收。HC-SR04原理图如图5所示。
超声波测距[4]是通过不断地探测被超声波击中的物体,然后在被超声波击中的物体上,不断地探测回波,从而得出发射和接收的时间间隔,从而得出距离S。图6为超声波时序图[5],测量期间当从反向传输管脚接收到HC-SR04输出的高电平脉冲时,便可进行下一次的测量,所以测量的时间取决于距离,反向传输的脉宽愈小,则测量的时间愈短;研究发现,随着回波脉宽的增大,检测所需的时间也随之延长。该模块工作标准电压为5 V,工作电流为5.3 mA,工作温度为-40~85 ℃,障碍物感应角度小于15°,探测距离为2~600 cm,探测精度为0.1cm±1%。
2.4" 电机驱动模块
该模块选用L298N为驱动芯片,完成了对直流减速电机的控制。本次项目所设计的电路具有低发热、高抗干扰、高驱动等特性,其主要特征为工作电压高,最高可达到46 V;输出电流大,瞬间峰值电流达到3 A,连续工作电流2 A;额定功率25 W。该模块具有双通道输出,可对电机进行多种控制与输出[6]。
除此此外,L298N还可以采用PWM方式对电动机进行调速,利用脉冲调制的方式来控制电动机的电压,实现电动机的速度。在这个系统的设计中,它是驱动的两个直流电机,在驱动直流电机的时候,可以直接控制进步电机,从而实现电机的正反向和调速。该模块通过驱动电源部分,可以使用内置的78M05来实现取电工作当驱动电压为7~12 V,即VCC电机驱动器端子接通驱动电源时,无须外接电源,只需按下按钮即可使用78M05供应芯片的电源。但是为了避免稳压芯片损坏,当驱动电压大于12 V的时候需要断开板载使能跳线帽,在逻辑端子外接5 V电源供电。经过实测表明,应用该模块方案先进有效。模块实物如图7、图8所示。
2.5" 电源模块
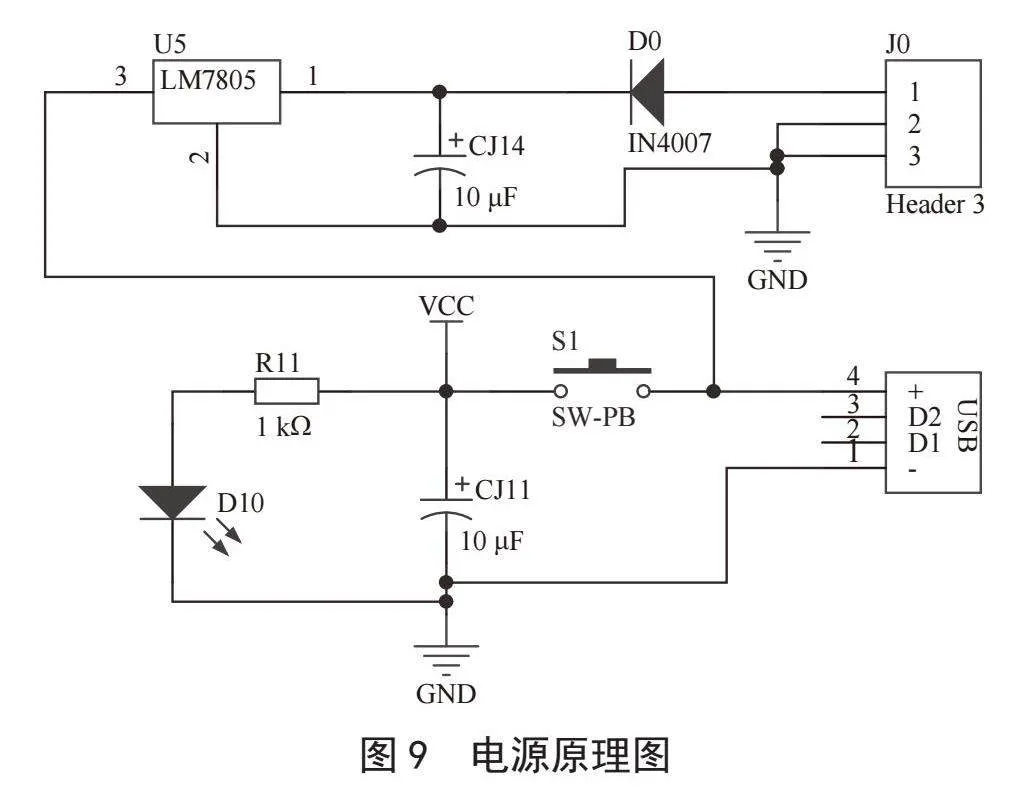
本机电源模块使用12 V直流电源,为一般之标准配置,具较强之普适性与兼容性。该方案具有较高的可靠性和安全性,较高的能量利用效率,且电路结构简单,易于实现。电源原理图如图9所示。
3" 自动循迹小车
循迹小车整体结构,电路主要包括线路检测、电压比较、驱动、执行器等。LM393是一种以两台高精度的电压比较器为主体的双路电压比较电路。输出负荷电群可以连接到任意容许的有源电压,而不会被VCC供电终端电压所限制。它的作用是根据输入电压的高与低,对两个输入电压作一个比较,使两个输入电压发生变化。
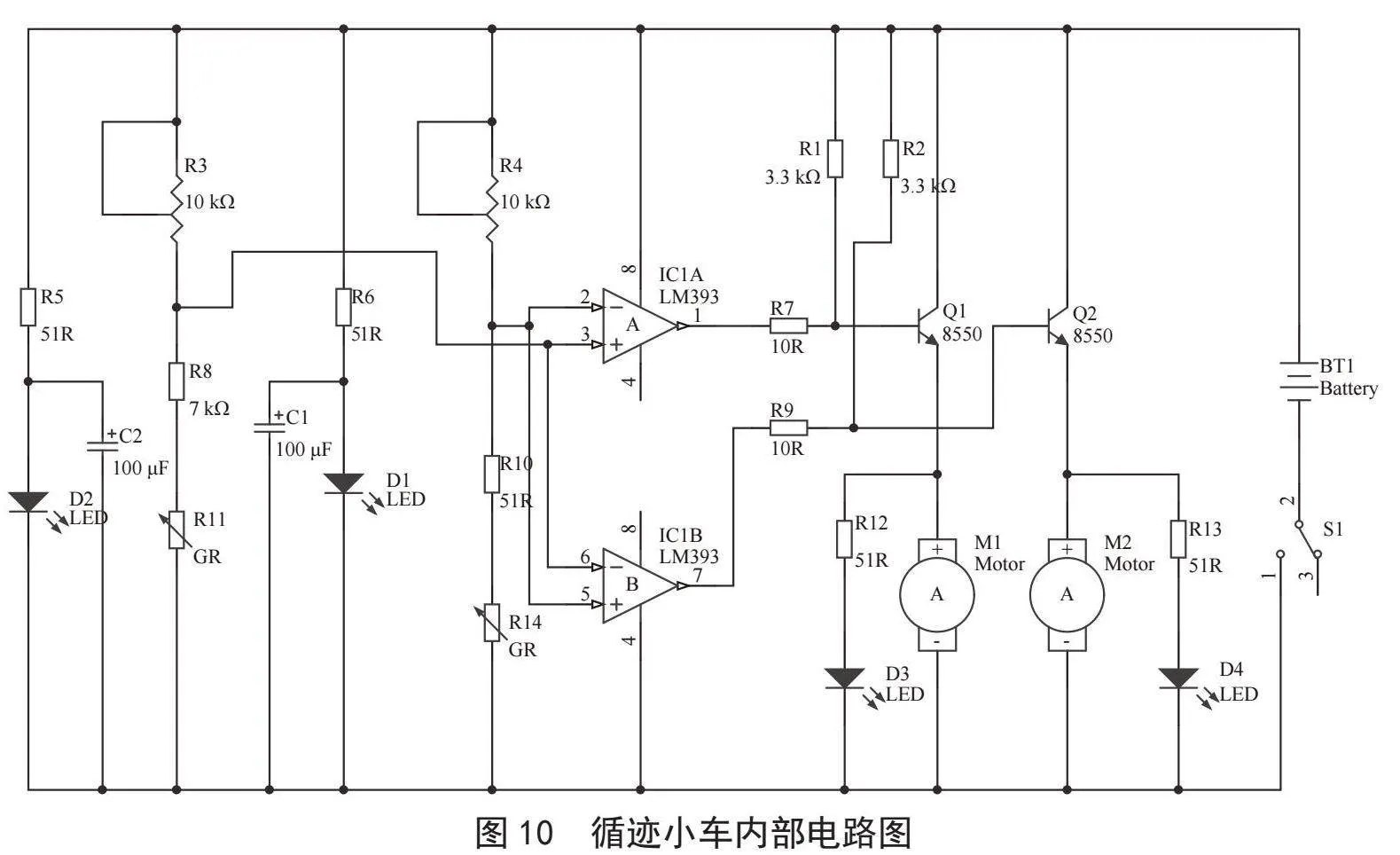
输出有两种状态,一种是接近开路,另一种是下拉接近低电平,LM393采用集电极开路,需要加拉电阻才能输出高电平,而集成运放工作在非线性区。而LM393则是通过对两个感光元件的对比,来实现对整个系统的控制。高亮度LED的光线照射在赛道上[7],LED的光线照射在赛道边缘的白区,光敏电阻器会接收到更强烈的反光,呈现更低的电阻器,如果照射在黑色的赛道上,则会产生更弱的反光,呈现更高的电阻器,这个循迹装置就是基于这个原理来完成的[8]。循迹小车电路如图10所示。
4" 软件部分设计
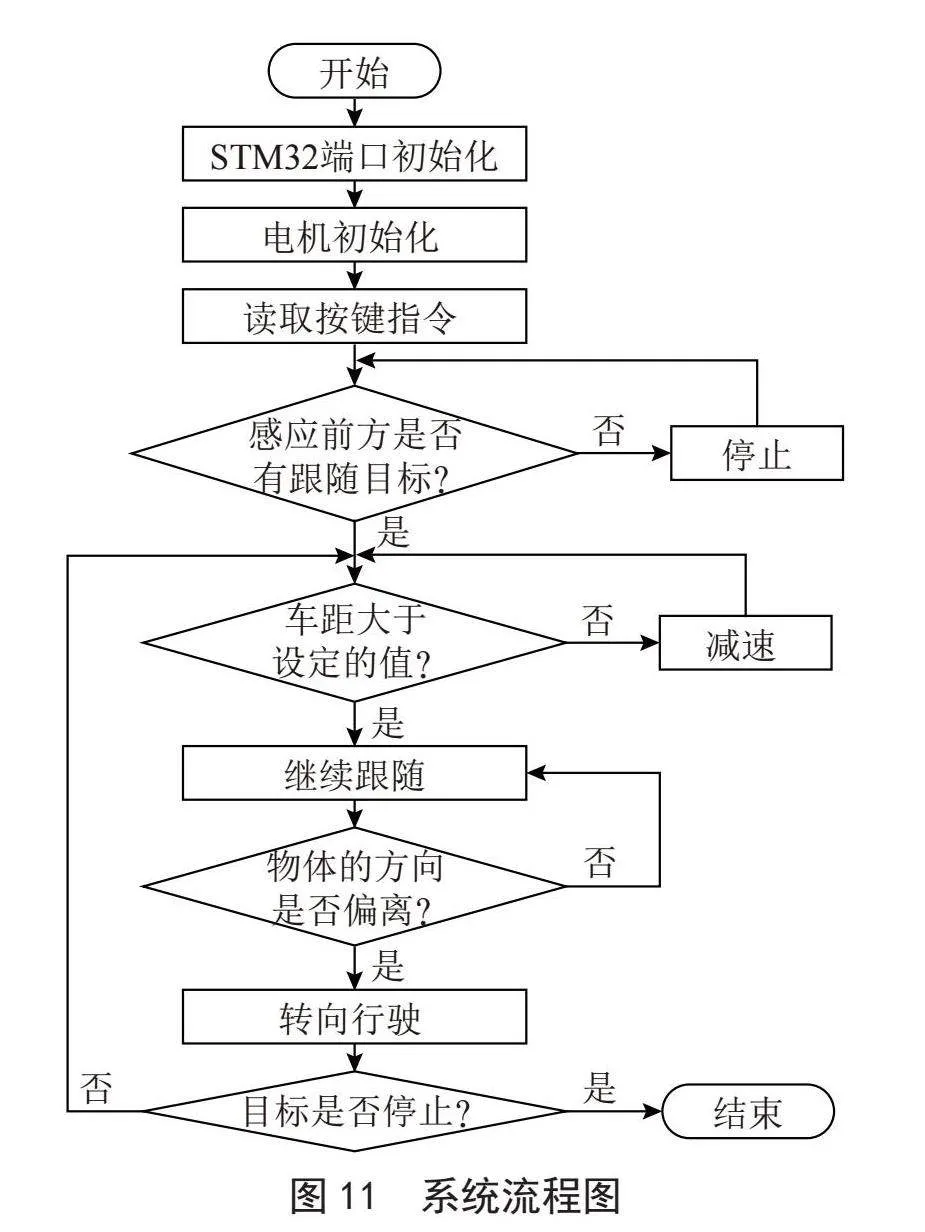
对于小车跟随行驶系统而言,软件系统是较为重要的一部分,跟随小车需要借助红外传感器的感应范围来确定跟随目标的位置信息,用STM32单片机控制L298N电机驱动器驱动电机行驶,是实现小车对移动目标的自动跟随。这个设计的过程是小车的红外传感器向目标物体发送红外线,遇到物体反射回来,红外传感将信号传送给主控模块,继而控制电机。在这个过程中,超声波模块控制距离,在感应到前方车距小于设定值时,小车停止运动,车距大于设定值,小车跟随行驶[9]。若感应到物体的移动,红外传感器感应到物体移动的方向,将信息传给单片机,单片机进行位置判断,驱动电机向物体移动方向行驶,在行驶过程中不断调整位置。系统流程图如图11所示。
5" 实物测试
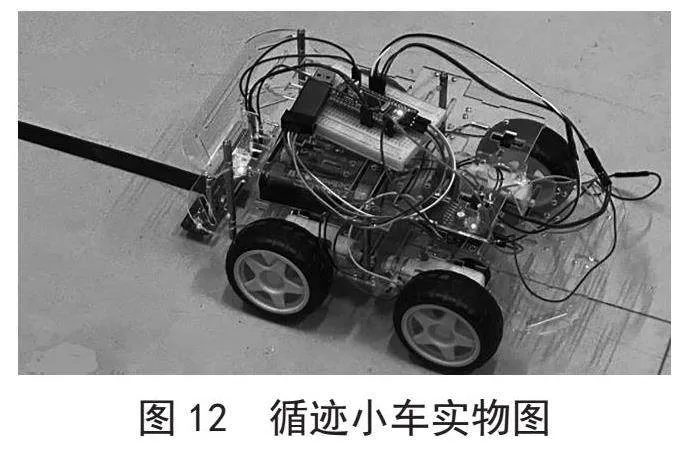
要确保循迹小车的正常运转,跑道的宽度一定要比两边探测器的间隔小,通过实物验证发现15~
20 mm的距离为最好,在小车过弯的时候不能过于仓促,不然很容易出现脱轨。为了保证测量效果和提高计算准确度,需要对左右两边传感器的间距[10]进行适当的调整,使其与跑道路径相匹配,从而实现对道路的自动辨识和相应参数的计算。循迹小车在循迹过程中,如若丢失路线目标,会在原地转圈。小车实物如图12所示。
检查电路有无错误,再将将程序烧录到STM32单片机中,连接电源,按下复位按钮回到初始状态,再按下自动跟随按钮。为了方便,一开始只需要拿一个纸板代替循迹小车引导后面的跟随小车,跟随小车检测到纸板的移动,超声波传感器回传距离信号,超过给定距离后开始跟随。此时,红外传感对应方向指示灯亮,通过红外传感器感应物体移动方向,再由单片机通过相关参数计算夹角控制转向,让跟随小车具备左右转向行驶能力。当小车超声波传感器感应到前方物体距离小于给定的值时再次停止运动,感应到距离大于给定的值时再次启动,跟随行驶,这样就实现了小车的自动跟随效果。
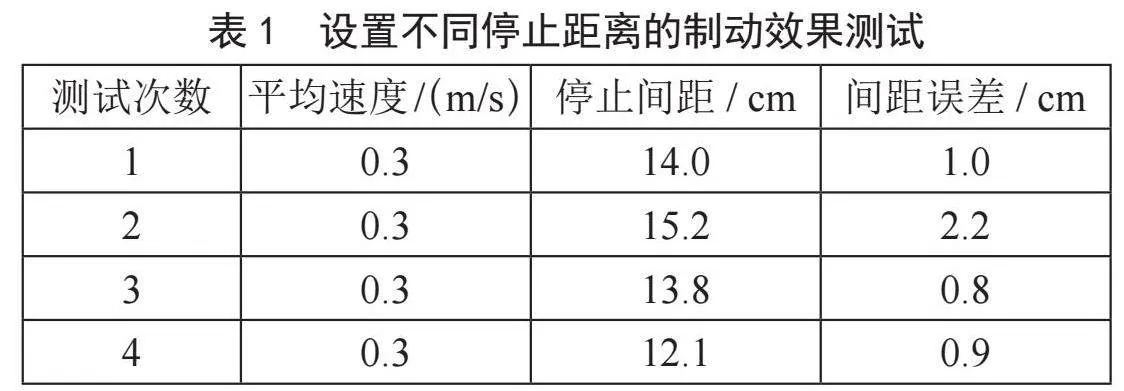
为了获得稳定的实验效果,整个过程速度设置比较低,大约为0.3 m/s,后续的参数测量也是由这个速度条件下得到。为测算最佳跟随、停止给定值,在程序中设置了不同的启停距离(控制跟随启动和停止),并列表对启停效果进行对比,如表1所示。
从表1可以看出,在0.3 m/s的匀速直线条件下,给定停止间距为13 cm左右具有比较稳定的效果,跟随小车与目标物的启停误差最小。分析原因,在目标物较远时超声波散射增加导致衰减变大,获取值的误差变大,从而导致制动效果欠佳。追求提高小车速度也会让误差显著增大,特别在制动阶段,由于速度导致制动距离变大带来更大的误差,这种误差叠加测距误差使得实物小车无法通过设置更大距离的方式解决,从而导致小车与目标物的碰撞。
当跟随目标转向时,小车是否能按要求控制转向角度的要求是小车跟随的另一个重要参数。表2反映了实物测试中,目标物中轴线与小车前进方向成不同夹角的情况下,跟随小车的转向反应。经试验,在0.3 m/s的速度下,小车能够在60以内的夹角条件下进行转向跟随。
6" 结" 论
本文主要介绍了小车跟随行驶系统的主要内容,该系统主要分为两个部分,领头小车的循迹部分和跟随小车的自动跟随行驶系统。领头小车的循迹主要是依靠驱动电路行驶,利用发光二极管根据反射光来识别轨迹路线进行循迹。跟随小车的自动跟随行驶系统是以STM32为主控芯片,控制各模块进行配合工作。根据实际情况来进行动作控制,实现完美跟随。
小车跟随行驶系统是一种智能化很高的装置,他的核心原理便是基于传感器测量的数据进行实时计算。在本文中,一开始是利用红外模块进行测距,但红外传感只能实现物体跟随,在前方物体停止时,跟随小车并不能通过判断距离位置来停止运动。因此,便在原有的基础上添加了一个超声波传感器,用来控制小车与跟随物体之间的距离,并控制小车在检测前方物体停止时跟着停止运动,以此来防止发生碰撞。
参考文献:
[1] 单以才,李奇林,秦剑华,等.基于红外传感器的自主循迹小车控制算法设计与实现[J].机床与液压,2010,38(14):79-81+78.
[2] 刘群,郑丹莹,刘鸣.红外反射式传感器的自寻迹小车的设计 [J].实验科学与技术,2007(5):154-156.
[3] 张锴,李世光,朱晓莉,等.基于STM32的智能巡线小车 [J].电子测量技术,2012,35(2):105+107.
[4] 逯云杰.超声波定位跟随小车的系统硬设计研究 [J].电子制作,2020(17):95-97.
[5] 蔡磊,周亭亭,郭云鹏,等.基于超声波定位的智能跟随小车 [J].电子测量技术,2013,36(11):76-79+105.
[6] 霍春光,张嘉怡,刘影.复杂环境的自适应调速精准循迹小车系统设计 [J].电子设计工程,2022,30(11):6-11+16.
[7] 张伟,王桥,李莉,等.基于单片机的自动跟随小车 [J].物联网技术,2018,8(6):62-64.
[8] 吴鹏飞.高速工况下重型商用车队列行驶控制系统研究 [D].重庆:重庆理工大学,2021.
[9] 许记伟.智能小车跟随行驶系统的鲁棒控制设计与实现 [D].重庆:重庆大学,2015.
[10] 曾文琦.智能小车跟随行驶系统的设计 [J].工业技术与职业教育,2023,21(4):30-34.
作者简介:徐昊(1980—),男,汉族,重庆人,副教授,硕士研究生,研究方向:嵌入式技术。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
Chinese Physics B(2022年1期)2022-01-23 06:36:04
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2017年1期)2017-05-17 03:54:20
科学家(2016年3期)2016-12-30 00:09:18
电子制作(2016年11期)2016-11-07 08:43:49
成长·读写月刊(2015年11期)2015-12-21 21:39:54
物联网技术(2015年3期)2015-03-31 13:11:08
数字技术与应用(2014年7期)2014-10-23 22:04:56
现代电子技术(2014年17期)2014-09-17 18:34:10