基于多模深度森林和迭代Kuhn-Munkres的动态上车点推荐算法
2024-12-30 00:00:00郭羽含朱茹施
计算机应用研究 2024年12期





摘 要:
针对现存动态上车点配置模型在大规模算例的全局最优和求解效率方面存在瓶颈的问题,基于乘客步行距离、乘客步行时间、上车点路况指标以及至乘客目的地所需成本四个关键影响因子进行建模,并提出了基于多模深度森林的动态上车点预测算法和一种迭代Kuhn-Munkres上车点配置算法。预测算法融合了多模态决策树结构和深度学习技术以提升模型预测准确性;配置算法通过多场景自适应机制自动调整边权重并选择最优边进行增广,以得到所有乘客和上车点的最优配置。实验结果表明,相较于其他主流预测模型,该预测算法平均绝对误差降低2.705,均方误差降低5.915,可决系数提升0.214,解释方差提升0.195;配置算法在乘客数量占优条件下的平均调度效果相较于实验中其他方案提高了2.04%。这表明预测算法和配置算法具有较高的实用性,且配置算法在处理大规模实例上具有明显优势。
关键词:上车点推荐;多模深度森林;迭代Kuhn-Munkres算法;网约车;城市交通
中图分类号:TP301.6"" 文献标志码:A""" 文章编号:1001-3695(2024)12-015-3634-11
doi: 10.19734/j.issn.1001-3695.2024.04.0123
Dynamic pick-up point recommendation based on multi-modal deep forest and iterative Kuhn-Munkres algorithm
Guo Yuhan, Zhu Rushi
(School of Science/School of Big Data Science, Zhejiang University of Science amp; Technology, Hangzhou 310023, China)
Abstract:
To address the bottleneck issues of global optimality and computational efficiency in existing dynamic pick-up point allocation models for large-scale scenarios, this paper developed a model based on four key influencing factors: passenger walking distance, passenger walking time, pick-up point road conditions, and the cost to the passenger’s destination. This paper proposed a multi-modal deep forest-based dynamic pick-up point prediction algorithm and an iterative Kuhn-Munkres pick-up point allocation algorithm. The prediction algorithm integrated a multi-modal decision tree structure with deep learning techniques to enhance prediction accuracy. The allocation algorithm utilized a multi-scenario adaptive mechanism to automatically adjust edge weights and selected the optimal edges for augmentation to achieve the optimal allocation for all passengers and pick-up points. Experimental results demonstrate that the proposed prediction algorithm reduces the mean absolute error by 2.705, the mean squared error by 5.915, increases the coefficient of determination by 0.214, and improves the explained variance by 0.195 compared to other mainstream prediction models. Under conditions where passenger quantity advantage, the allocation algorithm improves average scheduling effectiveness by 2.04% compared to other schemes tested in the experiments. These results indicate that the proposed algorithms are highly practical, with the allocation algorithm shows significant advantages in handling large-scale instances.
Key words:pick-up point recommendation; multi-modal deep forest; iterative Kuhn-Munkres algorithm; online ride-hailing; urban transportation
0 引言
近年来,智能通信终端的普及为乘客和网约车司机间的信息交流提供了便捷性和即时性,消除了以往由于空间差异而存在的信息壁垒[1]。在乘客通过智能软件发起订单并与司机匹配后,双方均需前往指定的上车点,合理的上车点配置可有效提升接驾效率、降低服务的经济和时间成本且有助于缓解交通拥堵。
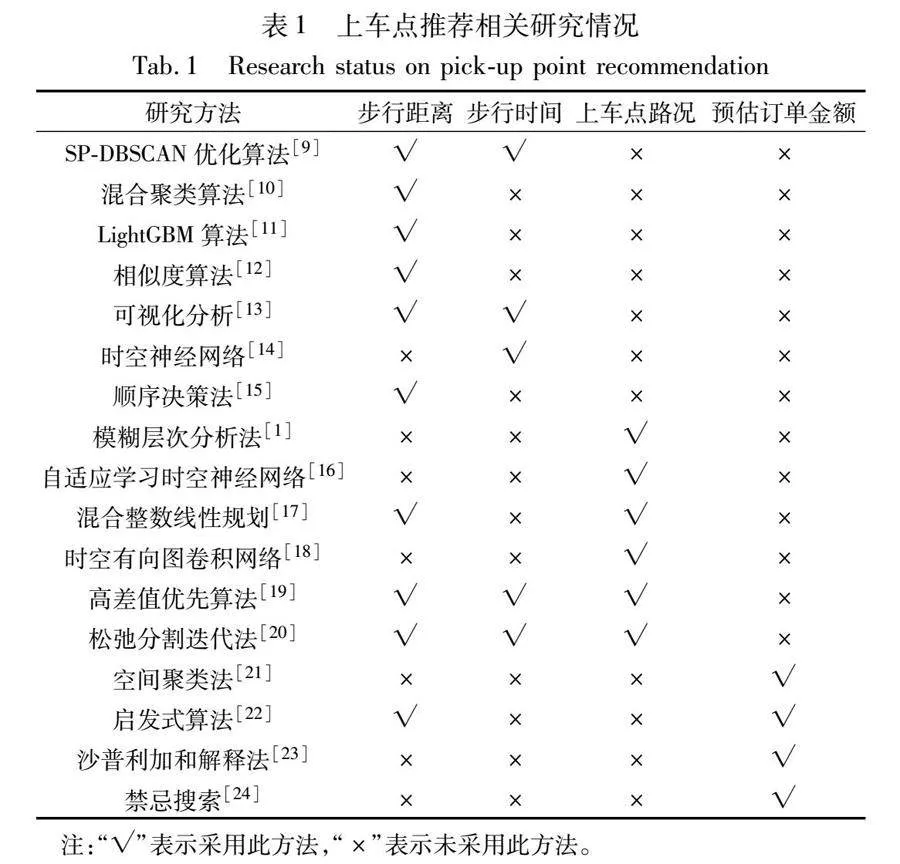
目前国内外对于网约车的研究主要集中在需求预测[2,3]、匹配调度[4]以及路径规划[5,6]等方面,对于上车点推荐的研究较为有限。文献[7,8]对上车点推荐问题进行了综述,将其研究方向主要归纳为减少乘客的步行距离和步行时间[9~15],优化上车点路况[1,16~20]和降低出行成本[21~24]等方面。
a)在减少乘客的步行距离和步行时间方面, Xia等人[9]设计了基于Spark的并行SP-DBSCAN算法,以满足乘客在特定位置没有成功搭车而随机转向下一个地点时仍能在热点区域乘车的要求。Mann等人[10]基于划分聚类法和层次聚类法提出了改进的混合聚类算法,向乘客推荐距离当前位置最近的上车点。康军等人[11]对各个上车点出租车空载率进行预测,并推荐乘客去往空载率最高且最近的上车点候车。Olakanmi等人[12]基于司机与乘客曾访问过的历史位置提出了一种考虑司机和乘客间信任与评价相似度的模型,为乘客推荐最短步行距离的上车点;Gu等人[13]设计了一个可视化分析系统,旨在可视化探索乘客在不同区域选择对自身有利的上车点;You等人[14]基于粒度网格和时空神经网络可有效预测和优化乘客步行时间和等待时间;Dieter等人[15]根据将乘客分配至上车点问题建模为一个顺序决策过程,以最小化乘客的步行距离。
b)在优化上车点路况方面,Zhu等人[1]综合各种交通影响因素,在保证上车点设置与实际交通情况相适应的情况下为乘客推荐上车点。Chang等人[16]基于上车点路况指标进行上车点推荐,并设计了宏观路径推荐方法,旨在提升交通领域低碳管理水平。Aliari等人[17]以乘客步行距离为指标,利用混合整数线性规划为乘客推荐上车点,以此缓解上车点拥堵问题。Zhang等人[18]根据历史上下车数据进行建模,利用时空有向图卷积网络算法为乘客推荐路况良好的上车点。郭羽含等人[19]建立上车点的复合收益评价体系,构建了上车点的动态推荐模型;在此基础上,他们设计了多目标整数规划模型,并提出了松弛分割迭代算法,从不同角度对上车点进行有效推荐[20]。
c)在降低出行成本方面,文献[21]利用空间聚类方法在空间和时间尺度上合并出租车行程簇,生成使乘客和出租车公司出行成本最小的上车点;文献[22]设计了一种基于用户激励机制的上车点推荐系统,鼓励乘客在一定距离内步行至合适的上车点,以最大限度降低出行成本;文献[23]发现出行成本与乘客使用乘车服务软件具有明显的非线性关系;文献[24]提出了网约车与乘客最佳乘车匹配的禁忌搜索,使乘客可节约更多成本,最大限度地提高乘客和司机的利益。
表1对现存代表性研究进行了总结,分析了各研究对步行距离、步行时间、上车点路况、预估订单金额等主要指标的考虑情况。
综合来看,现存模型与方法考虑的影响因素较为单一,滴滴出行在统计并分析网约车数据后发现,乘客出行行为与成本、时间、路况、便利度等多种因素相关。Vega-Gonzalo等人[25]通过问卷调查及广义结构方程模型得出乘客打车频率不仅受出行成本影响,还受行车安全、步行距离等因素的影响。Hou等人[26]认为空间可达性及路况是影响乘客出行的关键因素。Naumov等人[27]通过对乘客的出行习惯进行仿真分析,发现减少步行距离可提升约25%的乘客满意度。由此可见,综合分析乘客出行影响因素对于准确合理推荐上车点具有重要意义。此外,现存研究还存在以下问题需进一步解决:a)现存研究主要基于GPS数据进行分析,但由于GPS数据所跟踪的坐标点与实际可行的上车位置间存在差异,准确提取潜在上车点仍具挑战性;b)匹配算法仅独立考虑单次推荐,未将全局最优作为优化目标,导致同时段内单一上车点订单积压,从而引发订单取消或交通拥堵等问题。
针对上述问题,本文建立了考虑多影响因子的上车点推荐模型,提出了基于多模深度森林的动态上车点预测算法,并基于其预测结果设计了一种迭代Kuhn-Munkres上车点配置算法,实现了多角度多策略的上车点动态配置。本文主要贡献包括四个方面:
a)提出了基于路网匹配的潜在上车点提取方法,通过综合考量道路条件、实时交通信息等因素充分整合路网信息,使得所提取的潜在上车点更具实时性和准确性。
b)基于乘客步行距离、步行时间、上车点路况指标和预估订单金额四个关键影响因子建立上车点推荐模型,构建了全面考虑乘客便利性、运营效率及经济可行性的模型。
c)提出了基于多模深度森林的动态上车点预测算法,融合了不同结构的决策树,利用多模随机森林和复合随机森林替代原始随机森林和完全随机森林,对经过滑动窗口扫描后的子样本进行多模态特征采样,并通过级联结构将采样后的特征逐层组织和整合,有效降低了过拟合风险,提高了模型的泛化能力。
d)设计了一种高效的迭代Kuhn-Munkres上车点全局最优配置算法,在每轮迭代中通过多场景自适应机制自动调整乘客与上车点之间的边权重,并选择最优边进行增广以持续优化配置结果,从而显著提升配置算法的平均调度效果,并在大规模算例上具有较高的求解效率。
1 问题定义与建模
1.1 问题定义
1.2 数学模型
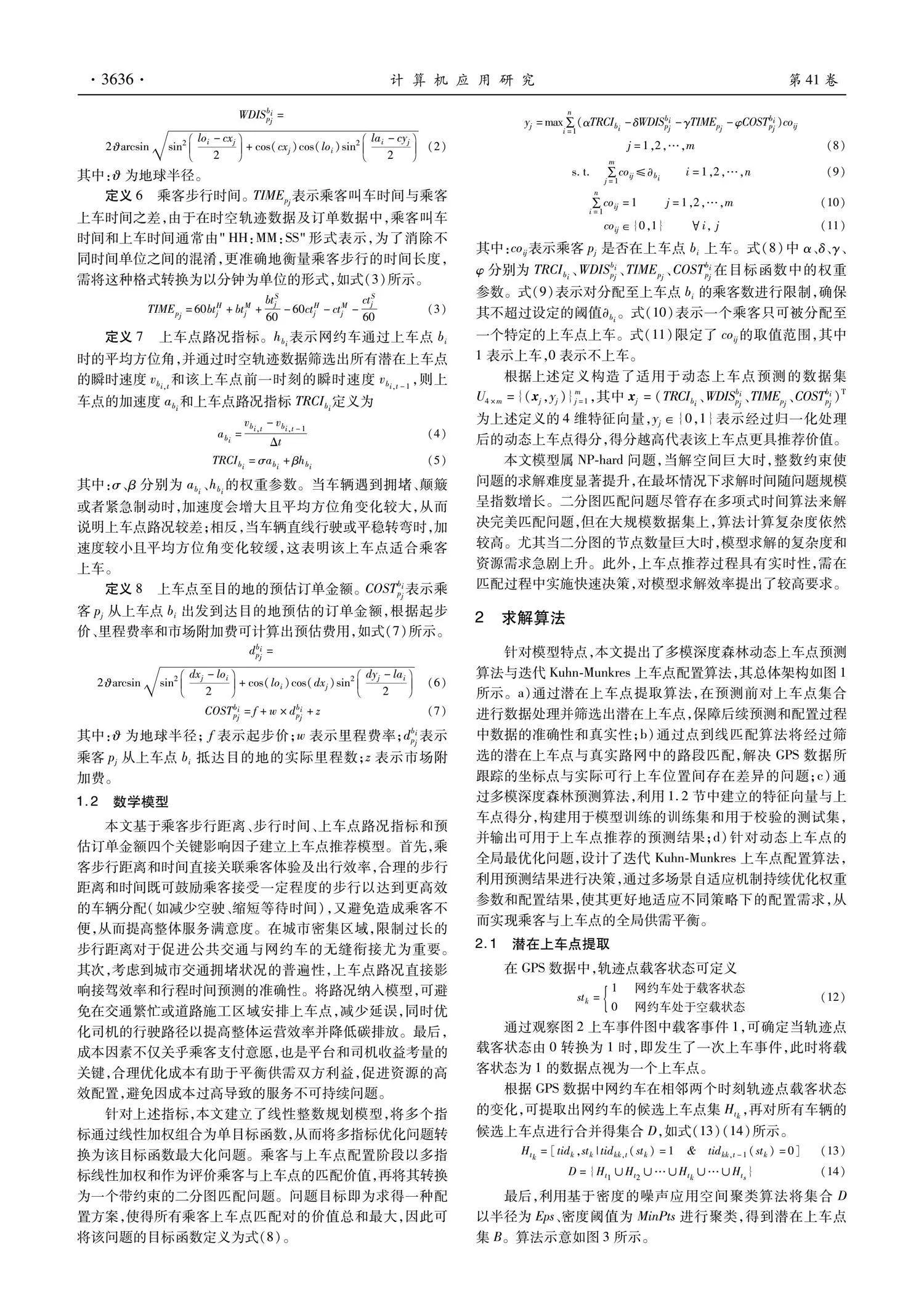
本文基于乘客步行距离、步行时间、上车点路况指标和预估订单金额四个关键影响因子建立上车点推荐模型。首先,乘客步行距离和时间直接关联乘客体验及出行效率,合理的步行距离和时间既可鼓励乘客接受一定程度的步行以达到更高效的车辆分配(如减少空驶、缩短等待时间),又避免造成乘客不便,从而提高整体服务满意度。在城市密集区域,限制过长的步行距离对于促进公共交通与网约车的无缝衔接尤为重要。其次,考虑到城市交通拥堵状况的普遍性,上车点路况直接影响接驾效率和行程时间预测的准确性。将路况纳入模型,可避免在交通繁忙或道路施工区域安排上车点,减少延误,同时优化司机的行驶路径以提高整体运营效率并降低碳排放。最后,成本因素不仅关乎乘客支付意愿,也是平台和司机收益考量的关键,合理优化成本有助于平衡供需双方利益,促进资源的高效配置,避免因成本过高导致的服务不可持续问题。
针对上述指标,本文建立了线性整数规划模型,将多个指标通过线性加权组合为单目标函数,从而将多指标优化问题转换为该目标函数最大化问题。乘客与上车点配置阶段以多指标线性加权和作为评价乘客与上车点的匹配价值,再将其转换为一个带约束的二分图匹配问题。问题目标即为求得一种配置方案,使得所有乘客上车点匹配对的价值总和最大,因此可将该问题的目标函数定义为式(8)。
其中:coij表示乘客pj是否在上车点bi上车。式(8)中α、δ、γ、φ分别为TRCIbi、WDISbipj、TIMEpj、COSTbipj在目标函数中的权重参数。式(9)表示对分配至上车点bi的乘客数进行限制,确保其不超过设定的阈值bi。式(10)表示一个乘客只可被分配至一个特定的上车点上车。式(11)限定了coij的取值范围,其中1表示上车,0表示不上车。
根据上述定义构造了适用于动态上车点预测的数据集U4×m={(xj,yj)}mj=1,其中xj=(TRCIbi、WDISbipj、TIMEpj、COSTbipj)T为上述定义的4维特征向量,yj∈{0,1}表示经过归一化处理后的动态上车点得分,得分越高代表该上车点更具推荐价值。
本文模型属NP-hard问题,当解空间巨大时,整数约束使问题的求解难度显著提升,在最坏情况下求解时间随问题规模呈指数增长。二分图匹配问题尽管存在多项式时间算法来解决完美匹配问题,但在大规模数据集上,算法计算复杂度依然较高。尤其当二分图的节点数量巨大时,模型求解的复杂度和资源需求急剧上升。此外,上车点推荐过程具有实时性,需在匹配过程中实施快速决策,对模型求解效率提出了较高要求。
2 求解算法
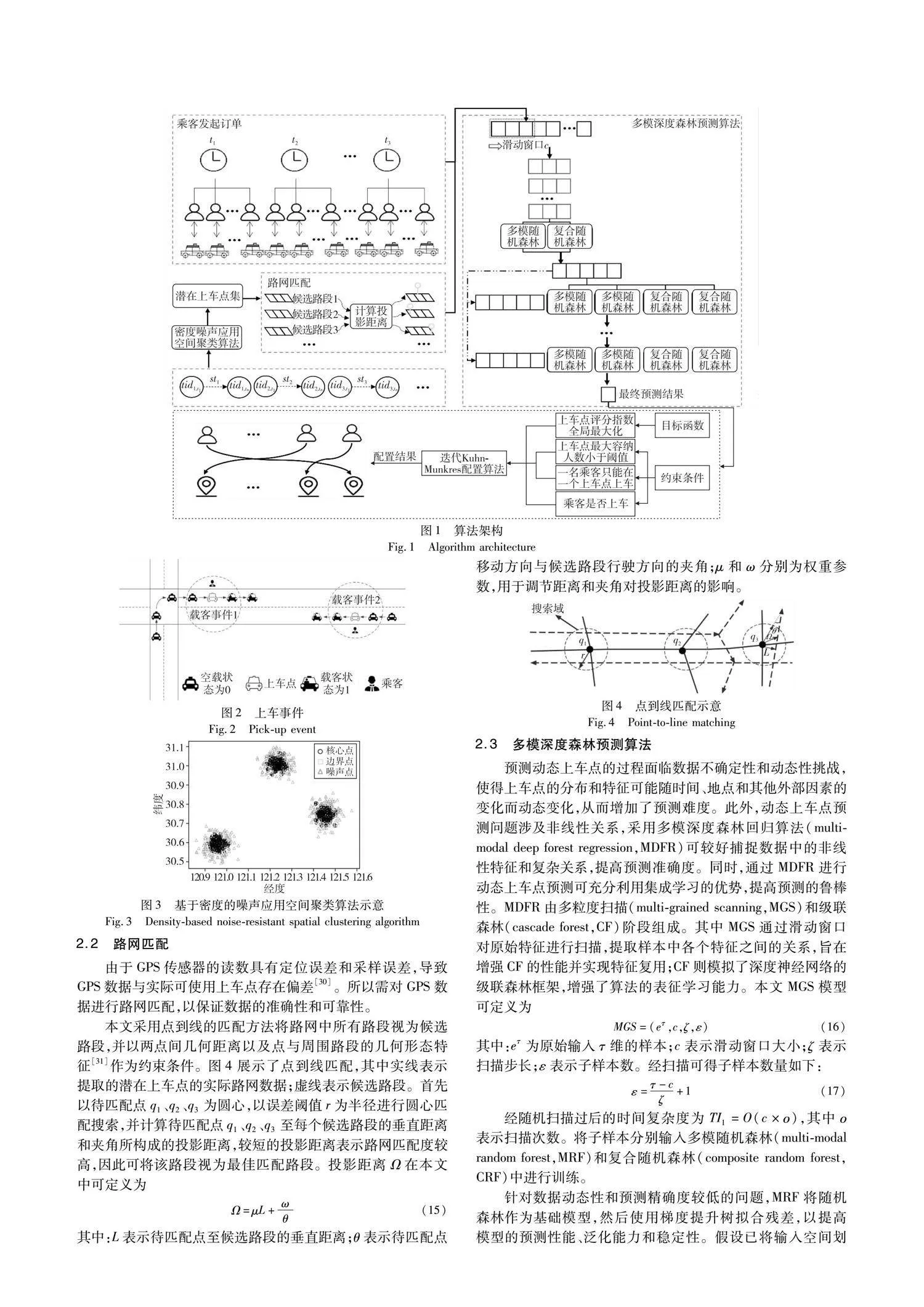
针对模型特点,本文提出了多模深度森林动态上车点预测算法与迭代Kuhn-Munkres上车点配置算法,其总体架构如图1所示。a)通过潜在上车点提取算法,在预测前对上车点集合进行数据处理并筛选出潜在上车点,保障后续预测和配置过程中数据的准确性和真实性;b)通过点到线匹配算法将经过筛选的潜在上车点与真实路网中的路段匹配,解决GPS数据所跟踪的坐标点与实际可行上车位置间存在差异的问题;c)通过多模深度森林预测算法,利用1.2节中建立的特征向量与上车点得分,构建用于模型训练的训练集和用于校验的测试集,并输出可用于上车点推荐的预测结果;d)针对动态上车点的全局最优化问题,设计了迭代Kuhn-Munkres上车点配置算法,利用预测结果进行决策,通过多场景自适应机制持续优化权重参数和配置结果,使其更好地适应不同策略下的配置需求,从而实现乘客与上车点的全局供需平衡。
2.1 潜在上车点提取
在GPS数据中,轨迹点载客状态可定义
stk=1 "网约车处于载客状态0 "网约车处于空载状态(12)
通过观察图2上车事件图中载客事件1,可确定当轨迹点载客状态由0转换为1时,即发生了一次上车事件,此时将载客状态为1的数据点视为一个上车点。
根据GPS数据中网约车在相邻两个时刻轨迹点载客状态的变化,可提取出网约车的候选上车点集Htk,再对所有车辆的候选上车点进行合并得集合D,如式(13)(14)所示。
Htk=[tidk,stk|tidkk,t(stk)=1 amp; tidkk,t-1(stk)=0](13)
D={Ht1∪Ht2∪…∪Htk∪…∪Hts}(14)
最后,利用基于密度的噪声应用空间聚类算法将集合D以半径为Eps、密度阈值为MinPts进行聚类,得到潜在上车点集B。算法示意如图3所示。
2.2 路网匹配
由于GPS传感器的读数具有定位误差和采样误差,导致GPS数据与实际可使用上车点存在偏差[30]。所以需对GPS数据进行路网匹配,以保证数据的准确性和可靠性。
本文采用点到线的匹配方法将路网中所有路段视为候选路段,并以两点间几何距离以及点与周围路段的几何形态特征[31]作为约束条件。图4展示了点到线匹配,其中实线表示提取的潜在上车点的实际路网数据;虚线表示候选路段。首先以待匹配点q1、q2、q3为圆心,以误差阈值r为半径进行圆心匹配搜索,并计算待匹配点q1、q2、q3至每个候选路段的垂直距离和夹角所构成的投影距离,较短的投影距离表示路网匹配度较高,因此可将该路段视为最佳匹配路段。投影距离Ω在本文中可定义为
Ω=μL+ωθ(15)
其中:L表示待匹配点至候选路段的垂直距离;θ表示待匹配点移动方向与候选路段行驶方向的夹角;μ和ω分别为权重参数,用于调节距离和夹角对投影距离的影响。
2.3 多模深度森林预测算法
预测动态上车点的过程面临数据不确定性和动态性挑战,使得上车点的分布和特征可能随时间、地点和其他外部因素的变化而动态变化,从而增加了预测难度。此外,动态上车点预测问题涉及非线性关系,采用多模深度森林回归算法(multi-modal deep forest regression,MDFR)可较好捕捉数据中的非线性特征和复杂关系,提高预测准确度。同时,通过MDFR进行动态上车点预测可充分利用集成学习的优势,提高预测的鲁棒性。MDFR由多粒度扫描(multi-grained scanning,MGS)和级联森林(cascade forest,CF)阶段组成。其中MGS通过滑动窗口对原始特征进行扫描,提取样本中各个特征之间的关系,旨在增强CF的性能并实现特征复用;CF则模拟了深度神经网络的级联森林框架,增强了算法的表征学习能力。本文MGS模型可定义为
MGS=(eτ,c,ζ,ε)(16)
其中:eτ为原始输入τ维的样本;c表示滑动窗口大小;ζ表示扫描步长;ε表示子样本数。经扫描可得子样本数量如下:
ε=τ-cζ+1(17)
经随机扫描过后的时间复杂度为TI1=O(c×ο),其中ο表示扫描次数。将子样本分别输入多模随机森林(multi-modal random forest,MRF)和复合随机森林(composite random forest,CRF)中进行训练。
针对数据动态性和预测精确度较低的问题,MRF将随机森林作为基础模型,然后使用梯度提升树拟合残差,以提高模型的预测性能、泛化能力和稳定性。假设已将输入空间划分为U个单元,且在每个单元上有固定输出值,则决策树模型可定义为
f(xl)=∑Ul=1ulI(xl∈Ul)(18)
利用多棵决策树集成随机森林,计算初始预测值与真实标签之间的残差,如式(20)所示。
f^(xl)=∑Ul=1f(xl)U(19)
υl=f(xl)-f^(xl)(20)
将残差作为新的目标值,利用梯度提升树拟合残差,梯度提升树在本文可定义为
MRF(xl)=∑Ul=1ηlf(xl)(21)
其中:ηl表示第l棵决策树的权重。梯度提升树采用梯度下降法来求解最优模型,对于第ι轮迭代,MRF可定义为
MRFι(xl)=MRFι-1-ηι∑Ul=1ΔFL(yl,MRFι-1(xl)+υl)(22)
最后,重复上述步骤多次,直到达到最小残差为止。
整个过程中需要对残差进行循环拟合以达到最小,时间复杂度为TI2=O(4m×log m×U+4m×ι)。
针对动态上车点预测的非线性特征和复杂关系问题,CRF将多项式特征变换嵌入到决策树算法中以增强决策树的非线性建模能力。在节点分裂过程中对输入的子样本进行多项式特征变换,形成新的特征集合如式(24)所示。
xj=(1,xj1,…,xj4,x2j1,…,x2j4,…,xκj1,…,xκj4)(23)
Xj=(x1,x2,…,xj,…,xm)(24)
式(23)中,xκj4表示第j个数据第4维特征的第κ阶多项式。将特征集合利用平方误差最小化准则作为划分节点的条件[32],则CRF可以定义为
CRF(Xj)=minj(∑Xj∈U(yj-f(Xj))2)(25)
此过程中无循环,仅为决策树节点的分裂,时间复杂度为TI3=O(4κm×log m)。
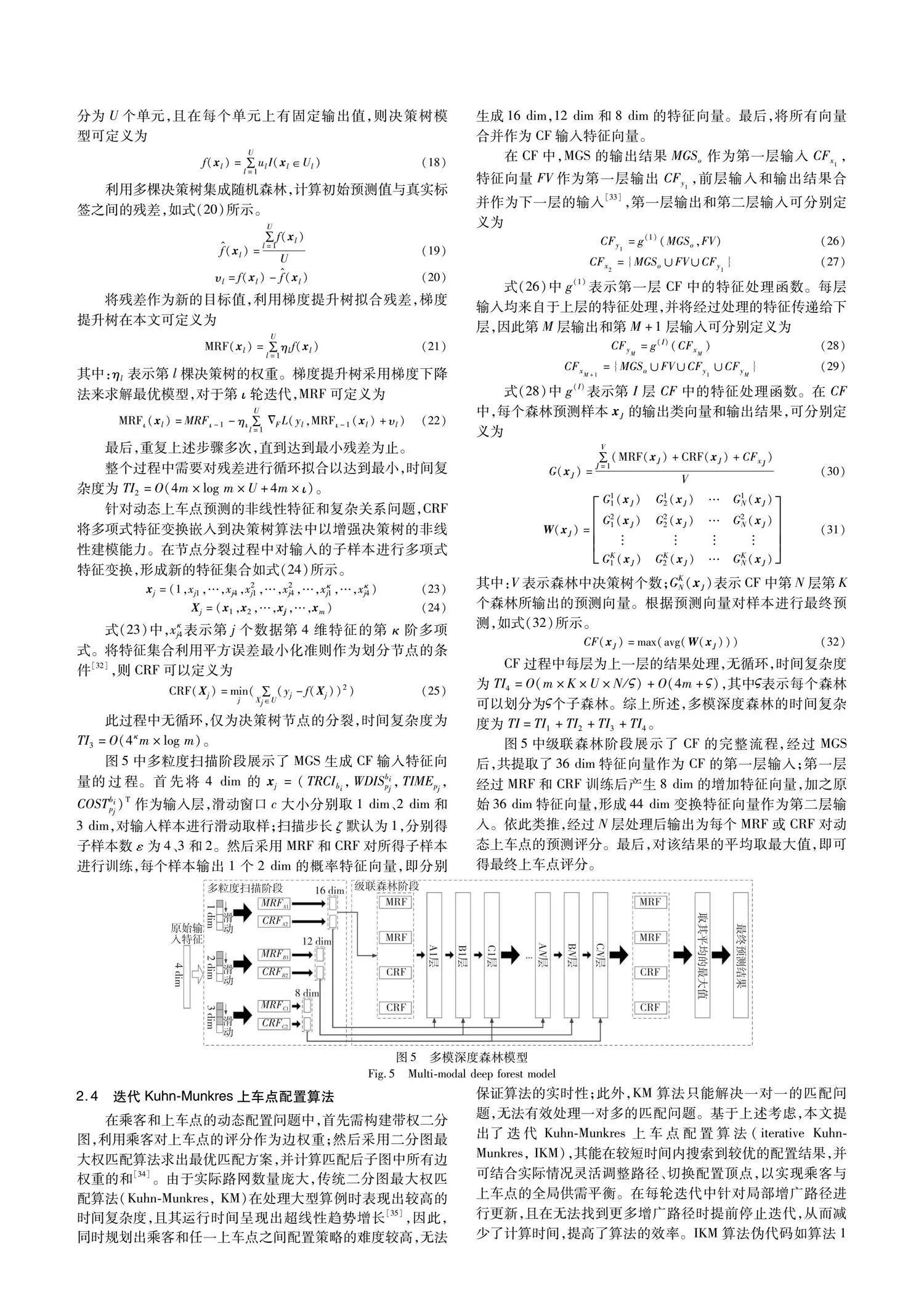
图5中多粒度扫描阶段展示了MGS生成CF输入特征向量的过程。首先将4 dim的xj=(TRCIbi,WDISbipj,TIMEpj,COSTbipj)T作为输入层,滑动窗口c大小分别取1 dim、2 dim和3 dim,对输入样本进行滑动取样;扫描步长ζ默认为1,分别得子样本数ε为4、3和2。然后采用MRF和CRF对所得子样本进行训练,每个样本输出1个2 dim的概率特征向量,即分别生成16 dim,12 dim和8 dim的特征向量。最后,将所有向量合并作为CF输入特征向量。
在CF中,MGS的输出结果MGSo作为第一层输入CFx1,特征向量FV作为第一层输出CFy1,前层输入和输出结果合并作为下一层的输入[33],第一层输出和第二层输入可分别定义为
CFy1=g(1)(MGSo,FV)(26)
CFx2={MGSo∪FV∪CFy1}(27)
式(26)中g(1)表示第一层CF中的特征处理函数。每层输入均来自于上层的特征处理,并将经过处理的特征传递给下层,因此第M层输出和第M+1层输入可分别定义为
CFyM=g(I)(CFxM)(28)
CFxM+1={MGSo∪FV∪CFy1∪CFyM}(29)
式(28)中g(I)表示第I层CF中的特征处理函数。在CF中,每个森林预测样本xJ的输出类向量和输出结果,可分别定义为
G(xJ)=∑VJ=1(MRF(xJ)+CRF(xJ)+CFxJ)V(30)
W(xJ)=G11(xJ)G12(xJ)…G1N(xJ)
G21(xJ)G22(xJ)…G2N(xJ)
GK1(xJ)GK2(xJ)…GKN(xJ)(31)
其中:V表示森林中决策树个数;GKN(xJ)表示CF中第N层第K个森林所输出的预测向量。根据预测向量对样本进行最终预测,如式(32)所示。
CF(xJ)=max(avg(W(xJ)))(32)
CF过程中每层为上一层的结果处理,无循环,时间复杂度为TI4=O(m×K×U×N/)+O(4m+),其中表示每个森林可以划分为个子森林。综上所述,多模深度森林的时间复杂度为TI=TI1+TI2+TI3+TI4。
图5中级联森林阶段展示了CF的完整流程,经过MGS后,共提取了36 dim特征向量作为CF的第一层输入;第一层经过MRF和CRF训练后产生8 dim的增加特征向量,加之原始36 dim特征向量,形成44 dim变换特征向量作为第二层输入。依此类推,经过N层处理后输出为每个MRF或CRF对动态上车点的预测评分。最后,对该结果的平均取最大值,即可得最终上车点评分。
2.4 迭代Kuhn-Munkres上车点配置算法
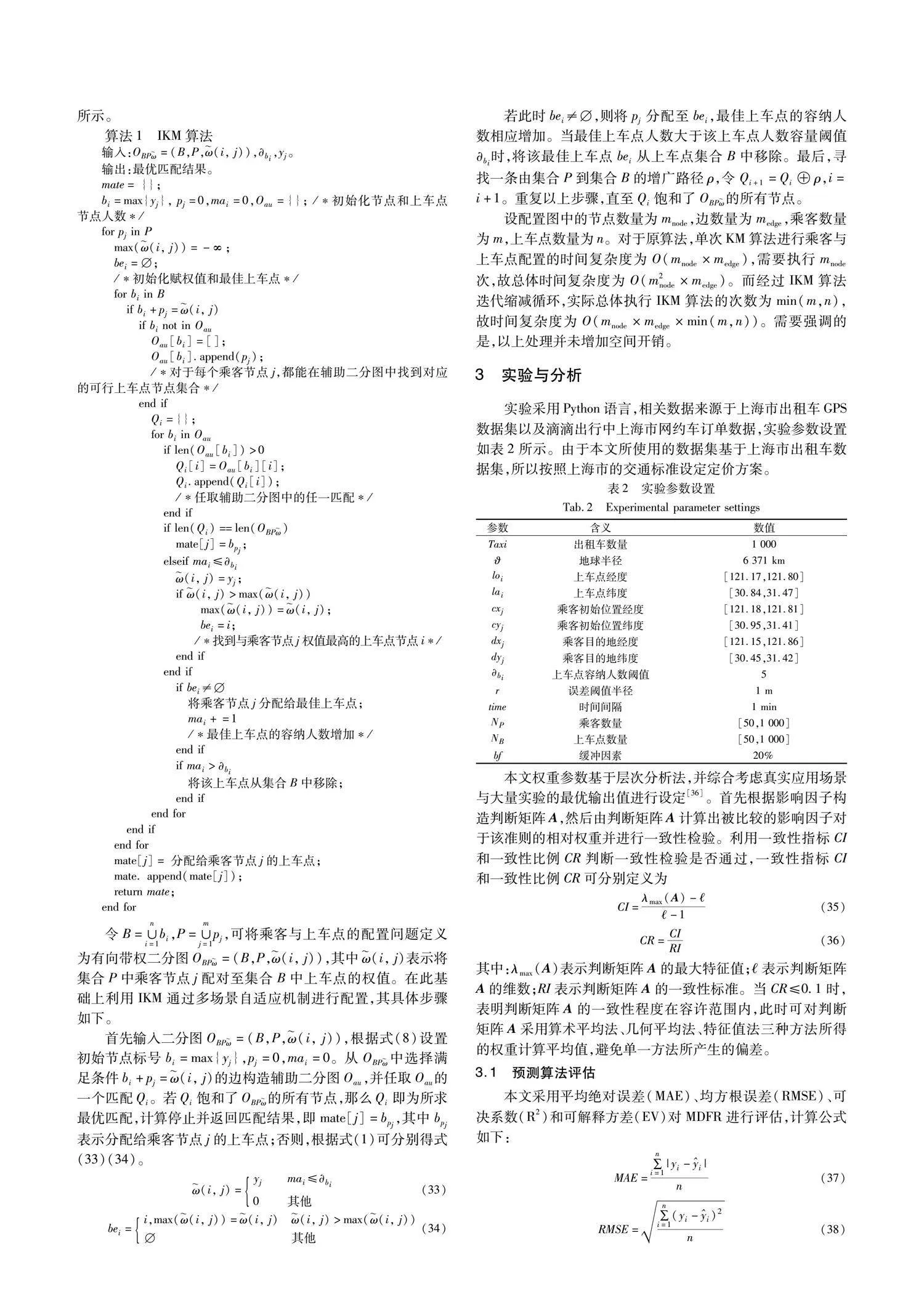
在乘客和上车点的动态配置问题中,首先需构建带权二分图,利用乘客对上车点的评分作为边权重;然后采用二分图最大权匹配算法求出最优匹配方案,并计算匹配后子图中所有边权重的和[34]。由于实际路网数量庞大,传统二分图最大权匹配算法(Kuhn-Munkres, KM)在处理大型算例时表现出较高的时间复杂度,且其运行时间呈现出超线性趋势增长[35],因此,同时规划出乘客和任一上车点之间配置策略的难度较高,无法保证算法的实时性;此外,KM算法只能解决一对一的匹配问题,无法有效处理一对多的匹配问题。基于上述考虑,本文提出了迭代Kuhn-Munkres上车点配置算法(iterative Kuhn-Munkres, IKM),其能在较短时间内搜索到较优的配置结果,并可结合实际情况灵活调整路径、切换配置顶点,以实现乘客与上车点的全局供需平衡。在每轮迭代中针对局部增广路径进行更新,且在无法找到更多增广路径时提前停止迭代,从而减少了计算时间,提高了算法的效率。IKM算法伪代码如算法1所示。
算法1 IKM算法
输入:OBP=(B,P,(i, j)),bi,yj。
输出:最优匹配结果。
mate= {};
bi=max{yj}, pj=0,mai=0,Oau={}; /*初始化节点和上车点节点人数*/
for pj in P
max((i, j))=-∞;
bei=;
/*初始化赋权值和最佳上车点*/
for bi in B
if bi+pj=(i, j)
if bi not in Oau
"Oau[bi]=[];
Oau[bi].append(pj);
/*对于每个乘客节点j,都能在辅助二分图中找到对应的可行上车点节点集合*/
end if
Qi={};
for bi in Oau
if len(Oau[bi])gt;0
Qi[i]=Oau[bi][i];
Qi.append(Qi[i]);
/*任取辅助二分图中的任一匹配*/
end if
if len(Qi)==len(OBP)
mate[j]=bpj;
elseif mai≤bi
(i, j)=yj;
if (i, j)gt;max((i, j))
max((i, j))=(i, j);
bei=i;
/*找到与乘客节点j权值最高的上车点节点i*/
end if
end if
if bei≠
"将乘客节点j分配给最佳上车点;
mai+=1
/*最佳上车点的容纳人数增加*/
end if
if maigt;bi
将该上车点从集合B中移除;
end if
end for
end if
end for
mate[j]= 分配给乘客节点j的上车点;
mate. append(mate[j]);
return mate;
end for
令B=∪ni=1bi,P=∪mj=1pj,可将乘客与上车点的配置问题定义为有向带权二分图OBP=(B,P,(i, j)),其中(i, j)表示将集合P中乘客节点j配对至集合B中上车点的权值。在此基础上利用IKM通过多场景自适应机制进行配置,其具体步骤如下。
首先输入二分图OBP=(B,P,(i, j)),根据式(8)设置初始节点标号bi=max{yj},pj=0,mai=0。
从OBP中选择满足条件bi+pj=(i, j)的边构造辅助二分图Oau,并任取Oau的一个匹配Qi。若Qi饱和了OBP的所有节点,那么Qi即为所求最优匹配,计算停止并返回匹配结果,即mate[j]=bpj,其中bpj表示分配给乘客节点j的上车点;否则,根据式(1)可分别得式(33)(34)。
(i, j)=yj" mai≤bi0其他 (33)
bei=i,max((i, j))=(i, j) (i, j)gt;max((i, j))其他(34)
若此时bei≠,则将pj分配至bei,最佳上车点的容纳人数相应增加。当最佳上车点人数大于该上车点人数容量阈值bi时,将该最佳上车点bei从上车点集合B中移除。
最后,寻找一条由集合P到集合B的增广路径ρ,令Qi+1=Qi⊕ρ,i=i+1。重复以上步骤,直至Qi饱和了OBP的所有节点。
设配置图中的节点数量为mnode,边数量为medge,乘客数量为m,上车点数量为n。对于原算法,单次KM算法进行乘客与上车点配置的时间复杂度为O(mnode×medge),需要执行mnode次,故总体时间复杂度为O(m2node×medge)。而经过IKM算法迭代缩减循环,实际总体执行IKM算法的次数为min(m,n),故时间复杂度为O(mnode×medge×min(m,n))。需要强调的是,以上处理并未增加空间开销。
3 实验与分析
实验采用Python语言,相关数据来源于上海市出租车GPS数据集以及滴滴出行中上海市网约车订单数据,实验参数设置如表2所示。由于本文所使用的数据集基于上海市出租车数据集,所以按照上海市的交通标准设定定价方案。
本文权重参数基于层次分析法,并综合考虑真实应用场景与大量实验的最优输出值进行设定[36]。首先根据影响因子构造判断矩阵A,然后由判断矩阵A计算出被比较的影响因子对于该准则的相对权重并进行一致性检验。利用一致性指标CI和一致性比例CR判断一致性检验是否通过,一致性指标CI和一致性比例CR可分别定义为
CI=λmax(A)--1(35)
CR=CIRI(36)
其中:λmax(A)表示判断矩阵A的最大特征值;表示判断矩阵A的维数;RI表示判断矩阵A的一致性标准。当CR≤0.1时,表明判断矩阵A的一致性程度在容许范围内,此时可对判断矩阵A采用算术平均法、几何平均法、特征值法三种方法所得的权重计算平均值,避免单一方法所产生的偏差。
3.1 预测算法评估
本文采用平均绝对误差(MAE)、均方根误差(RMSE)、可决系数(R2)和可解释方差(EV)对MDFR进行评估,计算公式如下:
MAE=∑ni=1|yi-i|n(37)
RMSE=∑ni=1(yi-i)2n(38)
R2=1-∑ni=1(yi-i)2∑ni=1(yi-i)2(39)
EV=1-∑ni=1[(yi-i)-(yi-i)]2∑ni=1(yi-)2(40)
=∑ni=1yin(41)
其中:yi和i分别为观测值和预测值;(yi-i)是(yi-i)的均值;n为观测样本的大小。
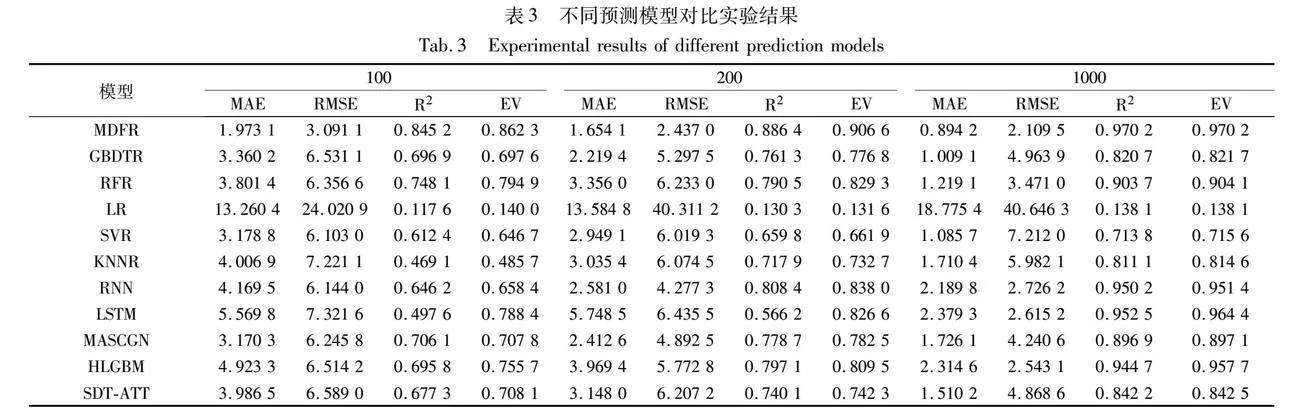
对比模型选取了:a)集成模型,梯度提升树回归模型(GBDTR)和随机森林回归模型(RFR);b)机器学习模型,线性回归模型(LR)、支持向量机回归模型(SVR)和K近邻回归模型(KNNR);c)代表性深度学习模型,包括循环神经网络(RNN)和长短时记忆神经网络(LSTM);d)其他,多头注意力时空卷积图网络模型(MASCGN)[37]、LightGBM混合模型(HLGBM)[38]和多元交互注意力机制模型(SDT-ATT)[39]。预测模型对比实验结果如表3所示。
由表3可知,对于MDFR,其MAE、RMSE、R2和EV值平均分别为2.375、30.935、0.909以及0.911。与其他模型相比,MDFR的平均绝对误差降低了2.705,均方误差降低了5.915,可决系数提升了0.214,解释方差提升了0.195,说明MDFR在预测最佳上车点方面表现良好。此外,不同模型在不同尺寸数据集上的表现存在差异,随着数据集尺寸的增加,模型的拟合程度有所提升。但在所有模型中LR表现最差,说明线性模型无法准确预测最佳上车点,与实际情况相符。
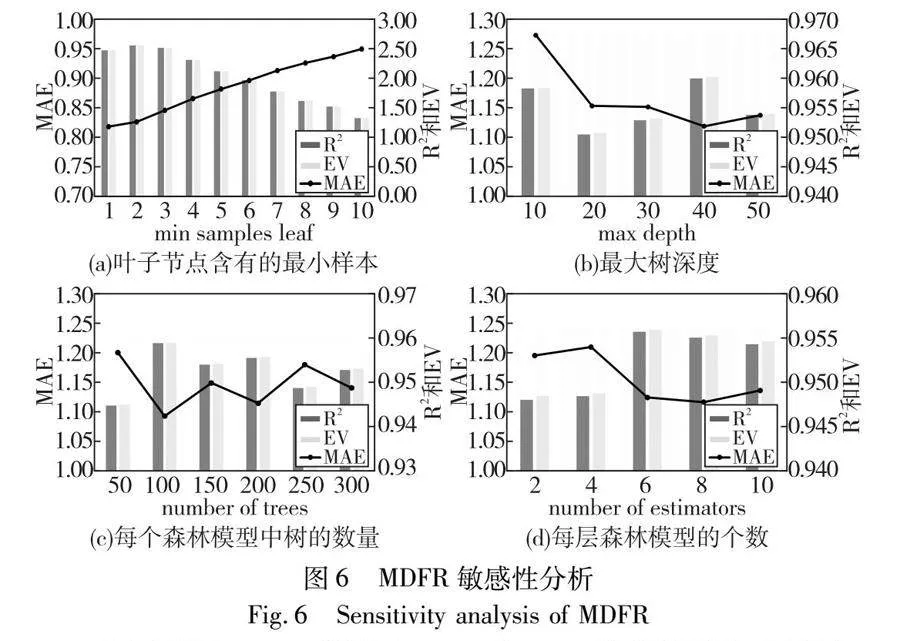
下面对MDFR进行敏感性分析,实验中分别修改了MDFR的四个参数,即叶子节点中含有的最小样本、最大树深度、每个森林模型中树的数量以及每层森林模型的个数。由图6可知,随着叶子节点中含有的最小样本的增加,MAE持续上升,而R2和EV值先上升后持续下降;当最大树深度增加时,MAE先大幅减少后趋于平稳,而R2和EV值则先减少后增大再减少;随着每个森林模型中树的数量增加,MAE先大幅下降后缓慢增加,而R2和EV则相反;随着每层森林模型的个数增加,MAE、R2和EV均先增加后下降。在叶子节点含有的最小样本小于3、最大树深度为40、每个森林模型中树的数量为100以及每层森林模型的个数在6~10时,MDFR表现最佳。
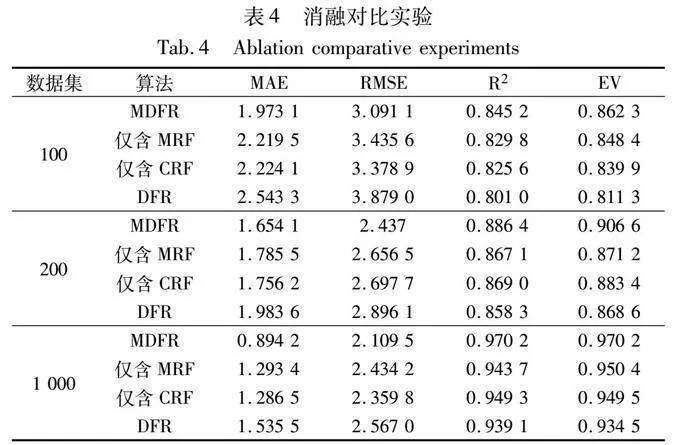
为了验证MDFR算法中MRF和CRF的高效性和有效性,本文使用深度森林预测模型(DFR)作为基础模型在原数据集上进行消融实验。为了保证结果的可靠性,在随机选择不同尺寸的数据集上各运行10次,取10次的平均值作为最终结果。实验结果如表4所示。
由表4可知,MDFR算法中MRF和CRF对算法MAE、RMSE、R2和EV的影响有所不同,但均比基础模型有所提升。当处理不同尺寸大小的数据集时,MDFR、仅含MRF和仅含CRF算法比不使用这些算法的DFR, MAE分别降低了0.514、0.255和0.265;RMSE分别降低了0.568、0.272和0.302; R2分别提升了0.034、0.014和0.019,EV分别提升了0.042、0.019和0.022。产生这样结果的原因是,MRF结合了随机森林和梯度提升树的优点,在每轮迭代中都会捕捉前一轮模型无法解释的数据动态性,能够逐步减少预测误差,持续优化模型性能,提高模型的预测准确性;CRF则是通过在决策树中引入多项式特征变换生成新的特征,使得模型可在更细致的层次上进行数据划分。由于特征空间变得更复杂,决策树可在多维空间中找到更合适的划分点,更好地适应数据中的非线性关系和复杂性。
综上所述,MDFR算法在大数据环境下具有良好的可行性和有效性。
3.2 配置算法评估
3.2.1 配置算法实验结果
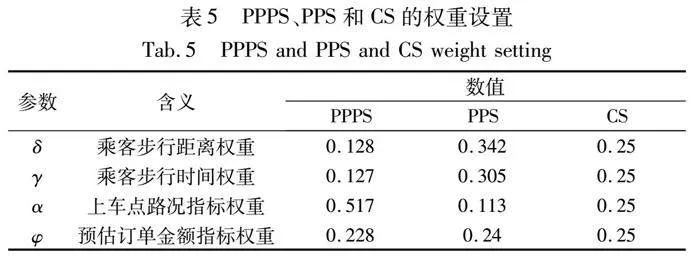
本节从乘客数量和上车点数量两个角度,对比分析在乘客数量占优(passenger quantity advantage,PQA)和上车点数量占优(pick-up point quantity advantage,PPQA)的条件下,上车点优先策略(pick-up point priority strategy,PPPS)[1]、乘客优先策略(passenger priority strategy,PPS)[19]和本文策略(comprehensive strategy,CS)的优劣以及对动态上车点推荐的影响。PPPS[1]、PPS[19]及CS策略的参数权重设置分别如表5所示。
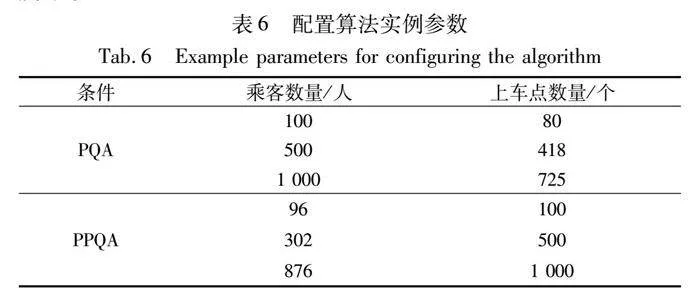
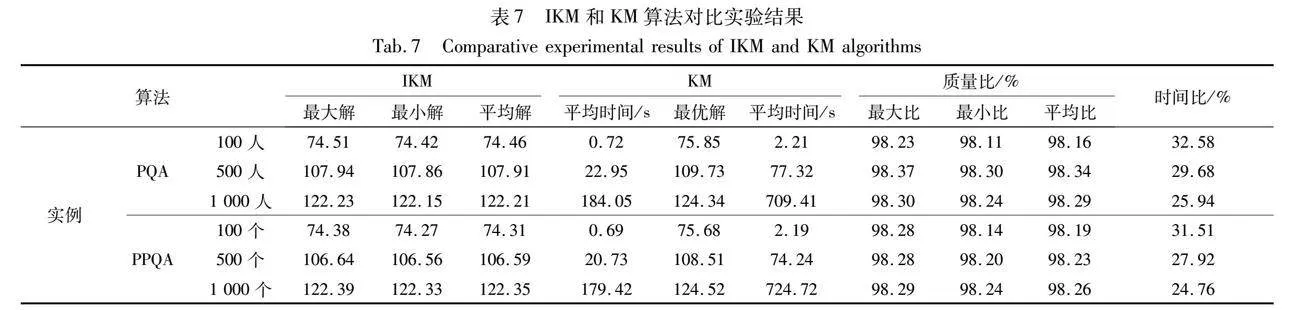
本节模拟了6个实例,3个不同数量乘客和3个不同数量上车点,实例参数如表6所示。对6个实例分别用IKM和KM算法各执行10次,将IKM的平均解、平均时间与KM算法的最优解、平均时间作比较,得到质量比和时间比,对比结果如表7所示。
由表7可知,对于较大规模的实例,时间比随着数据集尺寸的增加逐渐下降,且质量比均在98%以上,说明与KM算法最优解相比较,IKM算法可在较短时间内得到高质量的解。IKM算法的平均运行时间缓慢增长,而KM算法的平均运行时间呈非线性增长且增长迅速,说明IKM算法的时间效率优于KM算法。
IKM和KM算法在处理PQA条件下不同规模算例数据集时的平均运行时间分别为69.24 s和238.26 s,前者仅为后者的29.06%;IKM和KM算法在处理PPQA条件下不同规模算例数据集时的平均运行时间分别为66.95 s和200.78 s,前者仅为后者的33.34%。在本实验规模算例下,改进后的Kuhn-Munkres算法在解决乘客与上车点配置问题时表现出较好的结果,各种方案中IKM算法的求解效率是传统KM算法的64.97%。
3.2.2 PQA条件
在某些特定时间段、特殊事件期间或交通管制时,会出现在同一时刻内乘客叫车数量大于上车点数量的情况。本条件下限定乘客数量分别为100人、500人和1 000人,而上车点数量则分别在小于100个、500个和1 000个数据集中随机选择不同数量的上车点进行实验,实验结果如表8所示。
1)PPPS实验分析
图7中三角形图标表示乘客,圆形图标表示上车点,相同颜色表示该乘客被分配至该上车点(参见电子版)。尽管PPPS算法能确保每位乘客被成功配置到上车点,但应用上车点优先策略后,图7显示多数乘客步行距离和步行时间均有所增加。与CS和PPS相比,PPPS的平均得分分别降低了2.04%和1.08%,如表8所示。这一差异表明,在乘客与上车点的配置过程中,PPPS策略以牺牲乘客便利性为代价,追求其他目标的实现。因此,在特定PQA条件下PPPS不是最优选择。
2)PPS实验分析
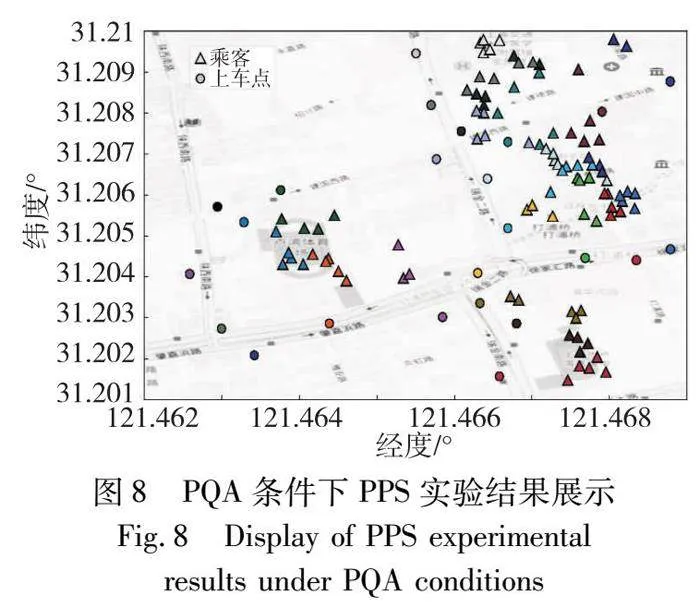
图8采用了与图7相同的表达方法展示乘客与上车点的对应关系。PPS算法基于自适应机制,综合考虑了乘客步行距离和步行时间,旨在为每位乘客分配一个具有相对优势的上车点。然而,此方法在特定区域(如景点和医院周边)的高峰时段易引发上车点附近路况恶化现象。此外,由于司机前往乘客指定的上车点过程中发生了行程偏移,导致乘客抵达目的地的订单金额超出预期。这些因素的共同作用使PPS的平均得分相较CS偏低,如表8所示。
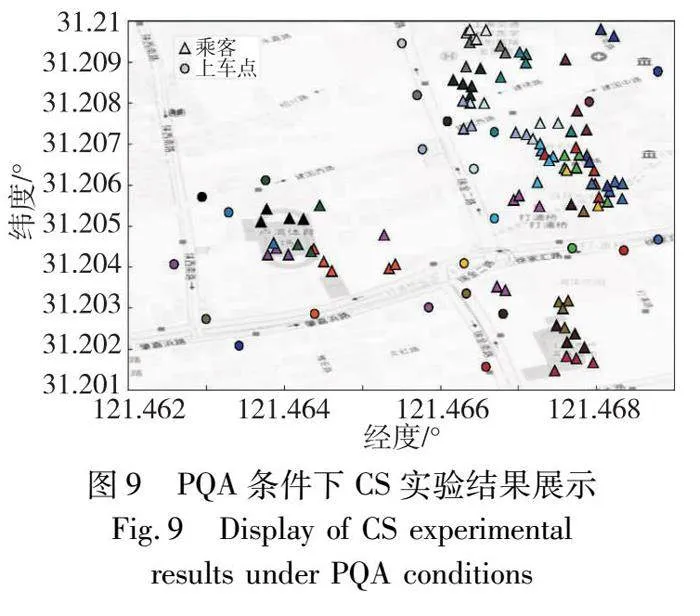
3)CS实验分析
图9中乘客与上车点的对应关系延续了图7相同的表达方式。由图9可知,CS算法通过多场景自适应机制,综合考量了上车点路况指标、预估订单金额、乘客步行距离及步行时间,将乘客分配至相应的上车点。尽管部分乘客被分配至距离稍远的上车点,但并未对整体评分产生显著影响。相反,由于所分配上车点位于交通状况较佳的区域,且减少了不必要的路线偏离。所以,乘客到达目的地的预估金额相对较低,反映了IKM算法在综合考量多因素后得出的优化结果。
3.2.3 PPQA条件
一般情况下,上车点数量通常会超过同时叫车的乘客数量。随着可供选择的上车点数量增加,乘客更易按照个人偏好选择上车点,这也与实验结果保持一致。通过对比分析表8和9可知,在PPQA条件下,乘客对各上车点的评分普遍高于PQA条件下的评分。本实验设定了不同数量上车点(100个、500个和1 000个)和乘客(小于100人、500人和1 000人),并在处理好的数据集中随机选择各种数量的乘客经纬度以及目的地经纬度,实验结果如表9所示。
1)PPPS实验分析
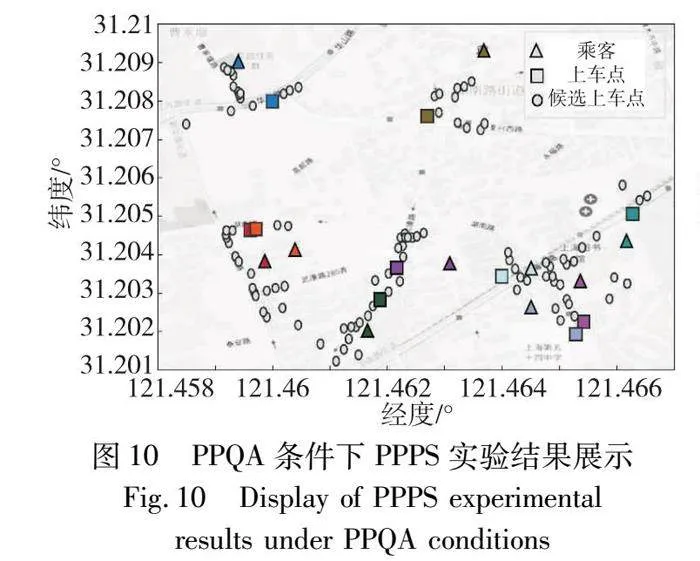
图10中三角形图标表示乘客,正方形图标表示上车点,圆形图标表示候选上车点,相同颜色表示该乘客被分配至该上车点(参见电子版)。PPPS算法将上车点作为首要考虑因素,旨在为每位乘客分配一个基于算法逻辑计算得出的最佳上车点。以深黄色乘客为例,由于步行距离最近的上车点靠近景点,基于交通情况考量,通常不被视为推荐的上车点;对于蓝灰色乘客而言,尽管存在更近的上车点,但鉴于道路设计或交通规则限制,司机在此处执行车辆转向操作存在困难,导致预估的订单金额增加。因此,PPPS算法将该乘客分配至一个路况较好且预估订单金额适宜的上车点,如图10所示。
2)PPS实验分析
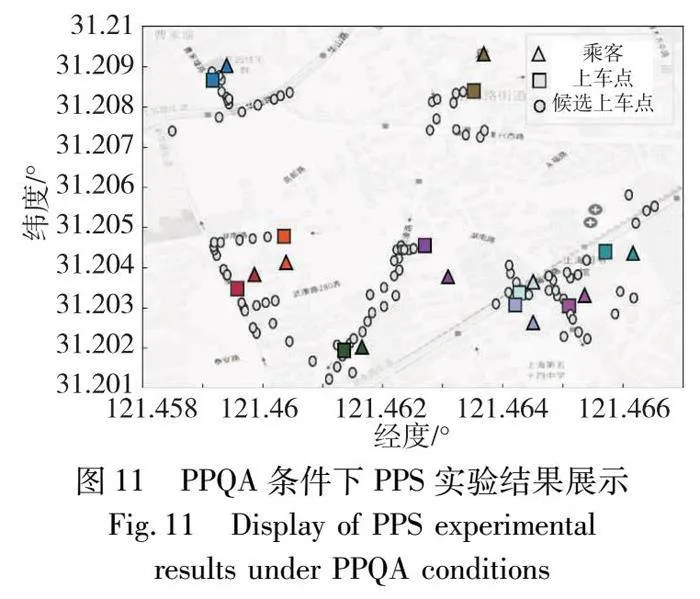
图11沿用了图10中的表达方法展示乘客与上车点的对应关系。在该图中,乘客与上车点的匹配结果均基于最小化乘客步行距离和步行时间的优化目标进行决策,此策略显著凸显了对乘客利益的优先考量,并将乘客的步行优化条件置于决策过程的核心地位。相较于其他两种策略,乘客对该策略匹配结果的评分普遍较高,进一步验证了该策略在提高乘客满意度方面的有效性,如表9所示。
3)CS实验分析
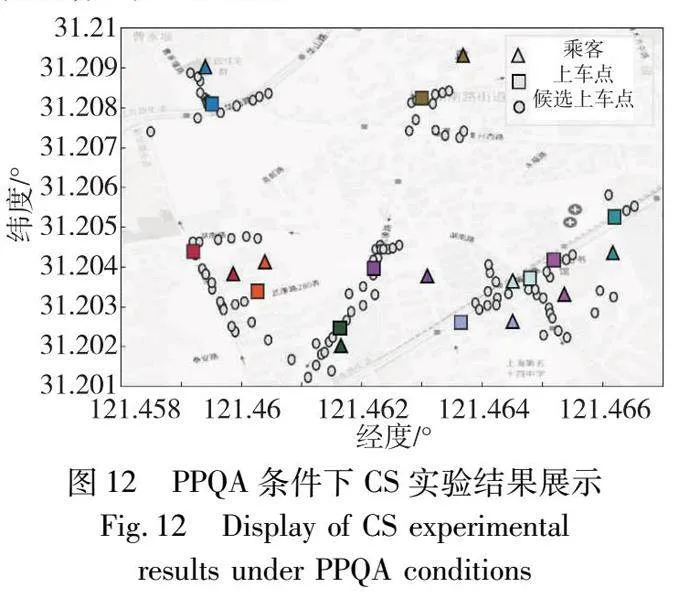
图12沿用了图10中的表达方法展示乘客与上车点的对应关系。在PPQA条件下,尽管乘客倾向于选择最为便利的上车点,但从CS角度来看,乘客的选择并不仅限于个人利益最大化。以上下班高峰期等特殊时间段为例,为减少交通拥堵带来的等待时间,乘客会选择增加步行距离,从而提高整体出行效率。然而从全局视角分析,CS策略下的平均得分指数略低于PPS[19]策略下的表现,如表9所示。
3.2.4 各影响因子真实占比分析
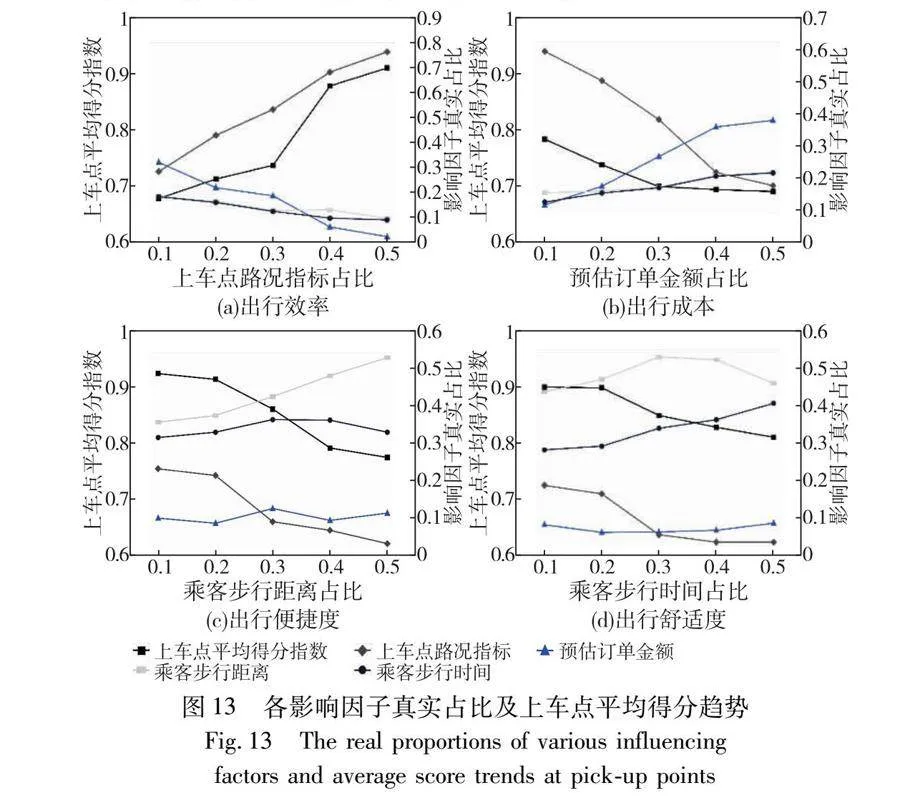
本节旨在通过调整权重参数来比较分析各影响因子真实占比之间的相关性,以及这些因素如何影响上车点平均得分指数的变化。图13中,(a)和(b)权重参数根据PPPS[1]策略设置,(c)和(d)权重参数根据PPS[19]策略设置。
由图13(a)可知,随着上车点路况指标占比的增加,上车点平均得分指数呈现正相关性,且在上车点路况指标占比介于[0.3, 0.4]时,上车点平均得分增长幅度最为显著。与此同时,预估订单金额、乘客步行距离和步行时间真实占比均有所下降,表明当上车点路况较差时,IKM算法更加重视路况因素,以优化乘客的出行体验。
由图13(b)可知,预估订单金额占比与上车点平均得分指数之间呈现出负相关性,随着预估订单金额占比的增加,上车点平均得分指数呈逐渐下降趋势。此外,上车点路况指标真实占比随着预估订单金额占比的增加而降低,表明在高价值订单情况下,路况因素对上车点配置的影响减弱。同时,乘客步行距离和乘客步行时间真实占比虽变化不大,但也呈现出缓慢增加的趋势,表明在订单金额较高时,乘客对步行距离和步行时间的敏感度有所增加,但此变化相对较小。
由图13(c)可知,随着乘客步行距离占比的增加,上车点平均得分指数呈现先下降后趋于稳定的趋势,表明在乘客步行距离达到一定阈值后对上车点配置的影响减弱。同时,上车点路况指标真实占比随着乘客步行距离占比的增加而持续下降,表明在短步行距离情况下,IKM算法更倾向于优先考虑步行距离而非上车点路况指标,以优化乘客的上车点配置。另一方面,预估订单金额真实占比呈现缓慢增加的趋势,表明随着步行距离的增加,预估订单金额在决策过程中的重要性逐渐上升。乘客步行时间真实占比随着步行距离占比的增加而呈现出先上升后下降的趋势,这一现象与多种因素有关,如乘客步行速度的变化、等待时间的长短、路况和环境因素等。
由图13(d)可知,随着乘客步行时间占比的增加,上车点平均得分指数呈现出缓慢下降后趋于稳定的趋势,这与乘客对步行时间的敏感度有关,即在步行时间较长时,乘客更倾向于选择得分较高的上车点以减少步行时间。同时,上车点路况指标真实占比呈现出先快速下降后趋于稳定的趋势,反映了在步行时间较长时上车点路况指标对决策的影响减弱。预估订单金额真实占比平缓增加且乘客步行距离真实占比先上升后下降,表明在乘客需求较低且乘客步行时间较长时,IKM算法更倾向于考虑减少乘客步行时间的上车点。
3.3 综合分析
3.3.1 平均得分分析
由表8可知,当处于PQA条件下时,CS策略具有一定优势,而PPPS策略的平均得分较低,与CS策略平均相差2.04%。由表9可知,当处于PPQA条件下时,PPS策略优于其他两种方案,且PPPS 策略平均得分仍为最低,与PPS策略平均相差4.14%。
综上所述,当处于PQA条件下时,乘车软件应根据CS策略为乘客推荐最佳上车点;当处于PPQA条件下时,则应根据PPS策略为乘客进行推荐。在实际生活中,需根据不同的现实情况进行讨论和动态推荐。
3.3.2 行程时间对比
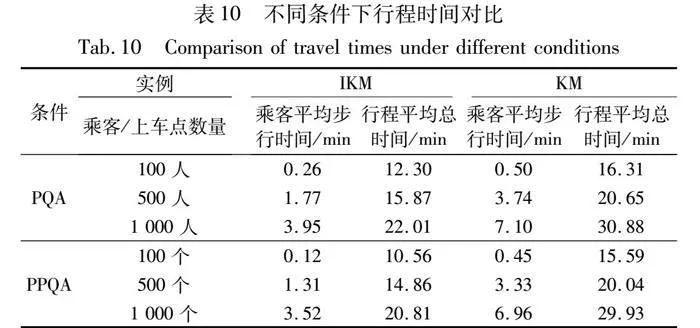
本文设定行人步行的平均速度为60 m/min,网约车的平均行驶速度为600 m/min。表10给出了不同条件下行程时间的对比结果。
由表10可知,KM算法在处理不同规模数据时耗时明显高于IKM算法,无法满足乘客与上车点配置的实时性要求。由于KM算法只考虑局部最优,导致乘客平均步行时间、行程平均总时间均高于IKM算法考虑全局最优后所得出的配置结果。
4 结束语
本文提出了一种基于多模深度森林和迭代Kuhn-Munkres的动态上车点推荐算法。首先,对时空轨迹大数据进行约束处理,以提取出基于路网匹配的潜在上车点集;其次,基于乘客步行距离、步行时间、上车点路况指标以及上车点至乘客目的地的预估订单金额等关键影响因子,利用多模深度森林预测算法进行最佳上车点预测;最后,通过迭代Kuhn-Munkres算法引导乘客前往最佳上车点上车,旨在减少运算资源消耗,并通过设置上车点的最大容纳人数阈值来解决同一上车点多乘客导致的交通拥堵问题。实验研究表明,本文提出的多模深度森林预测算法和迭代Kuhn-Munkres配置算法具有较高的实用性,且配置算法不仅能有效提升平均调度效果,同时在处理大规模数据集上有较高的求解效率。
本文目前仅从乘客和上车点的角度考虑上车点推荐问题,且提出的算法中的一些参数(如决策树数量、深度、决策权重等)需事先设定,并可能对最终的预测结果和配置结果产生影响。在未来的研究中,拟考虑将司机角度纳入模型范围以进一步提升交通效率、司机接单率以及乘客满意度;同时,将探索利用自动化参数调优技术来自动搜索最佳参数组合,以提高算法的性能和参数调节效率。
参考文献:
[1]Zhu Wanqiu, Lu Jian, Li Yunxuan, et al. A pick-up points recommendation system for ridesourcing service [J]. Sustainability, 2019, 11(4): 1097.
[2]路民超, 李建波, 逄俊杰, 等. 面向出租车需求预测的多因素时空图卷积网络 [J]. 计算机工程与应用, 2020, 56(24): 266-273. (Lu Minchao, Li Jianbo, Pang Junjie, et al. Multi-factor spatio-temporal graph convolution network for taxi demand prediction [J]. Computer Engineering and Applications, 2020, 56(24): 266-273.)
[3]熊亭, 戚湧, 张伟斌, 等. 基于时空相关性的短时交通流预测模型 [J]. 计算机工程与设计, 2019, 40(2): 501-507. (Xiong Ting, Qi Yong, Zhang Weibin, et al. Short term traffic flow forecasting model based on temporal-spatial correlation [J]. Computer Engineering and Design, 2019, 40(2): 501-507.)
[4]陈瑞, 沈鑫, 万得胜, 等. 面向绿色节能的智能网联电动车调度方法 [J]. 计算机科学, 2023, 50(12): 285-293. (Chen Rui, Shen Xin, Wan Desheng, et al. Intelligent networked electric vehicles scheduling method for green energy saving [J]. Computer Science, 2023, 50(12): 285-293.)
[5]郑渤龙, 明岭峰, 胡琦, 等. 基于深度强化学习的网约车动态路径规划[J]. 计算机研究与发展, 2022, 59(2): 329-341. (Zheng Bolong, Ming Lingfeng, Hu Qi, et al. Dynamic ride-hailing route planning based on deep reinforcement learning [J]. Journal of Computer Research and Development, 2022, 59(2): 329-341.)
[6]陈立军, 张屹, 陈孝如, 等. 网约车任务分配系统优化 [J]. 计算机系统应用, 2022, 31(6): 19-28. (Chen Lijun, Zhang Yi, Chen Xiaoru, et al. Optimization of task allocation system for online car-hailing [J]. Computer Systems Applications, 2022, 31(6): 19-28.)
[7]Wang Sai, Wang Jianjun, Li Weijia, et al. Revealing the influence mechanism of urban built environment on online car-hailing travel considering orientation entropy of street network [J]. Discrete Dynamics in Nature and Society, 2022(1): 3888800.
[8]Agarwal S, Charoenwong B, Cheng S F, et al. The impact of ride-hail surge factors on taxi bookings [J]. Transportation Research Part C: Emerging Technologies, 2022, 136(3): 103508.
[9]Xia Dawen, Bai Yu, Zheng Yongling, et al. A parallel SP-DBSCAN algorithm on spark for waiting spot recommendation [J]. Multimedia Tools and Applications, 2022,81(1): 4015-4038.
[10]Mann S K, Chawla S. A proposed hybrid clustering algorithm using K-means and BIRCH for cluster based cab recommender system (CBCRS) [J]. International Journal of Information Technology, 2023, 15(1): 219-227.
[11]康军, 张凡, 段宗涛, 等. 基于LightGBM的乘客候车路段推荐方法 [J]. 测控技术, 2020, 39(2): 56-62. (Kang Jun, Zhang Fan, Duan Zongtao, et al. Recommendation method of passengers’ boar-ding sections based on LightGBM [J]. Measurement amp; Control Technology, 2020, 39(2): 56-62.)
[12]Olakanmi O O, Odeyemi K O. A collaborative 1-to-n on-demand ride sharing scheme using locations of interest for recommending shortest routes and pick-up points [J]. International Journal of Intelligent Transportation Systems Research, 2021, 19(6): 285-298.
[13]Gu Shuxian, Dai Yemo, Feng Zezheng, et al. T-PickSeer: visual analysis of taxi pick-up point selection behavior [J]. Journal of Visualization, 2024, 27(6): 451-468.
[14]You Lan, Guan Zhengyi, Li Na, et al. A spatio-temporal schedule-based neural network for urban taxi waiting time prediction [J]. ISPRS International Journal of Geo-Information, 2021, 10(10): 703.
[15]Dieter P, Stumpe M, Ulmer M W, et al. Anticipatory assignment of passengers to meeting points for taxi-ridesharing [J]. Transportation Research Part D: Transport and Environment, 2023, 121(8): 103832.
[16]Chang Mengmeng, Chi Yuanying, Ding Zhiming, et al. A continuous taxi pickup path recommendation under the carbon neutrality context [J]. ISPRS International Journal of Geo-Information, 2021, 10(12): 821.
[17]Aliari S, Haghani A. Alternative pickup locations in taxi-sharing: a feasibility study [J]. Transportation Research Record, 2023, 2677(1): 1391-1403.
[18]Zhang Yan, Shen Guojiang, Han Xiao, et al. Spatio-temporal digraph convolutional network-based taxi pickup location recommendation [J]. IEEE Trans on Industrial Informatics, 2023, 19(1): 394-403.
[19]郭羽含, 刘秋月. 时空轨迹和复合收益的动态上车点推荐[J]. 计算机科学与探索, 2022, 16(7): 1611-1622. (Guo Yuhan, Liu Qiuyue. Dynamic pickup-point recommendation based on spatiotemporal trajectory and hybrid gain evaluation [J]. Journal of Frontiers of Computer Science and Technology, 2022, 16(7): 1611-1622.)
[20]郭羽含, 刘雨希, 刘秋月. 动态约束与松弛分割的多目标上车点推荐 [J]. 计算机工程与应用, 2023, 59(11): 320-328. (Guo Yuhan, Liu Yuxi, Liu Qiuyue. Multi-objective pick-up point recommendation with dynamic constraint and relaxed segmentation [J]. Computer Engineering and Applications, 2023, 59(11): 320-328.)
[21]Zhang Wenbo, Ukkusuri S V. Share-a-Cab: scalable clustering taxi group ride stand from huge geolocation data [J]. IEEE Access, 2021, 9: 9771-9776.
[22]Zhang Jing, Li Biao, Ye Xiucai, et al. Pick-up point recommendation strategy based on user incentive mechanism [J]. PeerJ Computer Science, 2023,9(11):e1692.
[23]Zhang Xiaojian, Zhou Zhengze, Xu Yiming, et al. Analyzing spatial heterogeneity of ridesourcing usage determinants using explainable machine learning [J]. Journal of Transport Geography, 2024, 114(1):103782.
[24]Nickkar A, Lee Y J, Meskar M. Developing an optimal peer-to-peer ride-matching problem algorithm with ride transfers [J]. Transportation Research Record, 2022, 2676(11): 124-136.
[25]Vega-Gonzalo M, Aguilera-García á, Gomez J, et al. Traditional taxi, e-hailing or ride-hailing? A GSEM approach to exploring service adoption patterns [J]. Transportation, 2024,51(8): 1239-1278.
[26]Hou Yi, Garikapati V, Weigl D, et al. Factors influencing willingness to pool in ride-hailing trips [J]. Transportation Research Record, 2020, 2674(5): 419-429.
[27]Naumov S, Keith D. Optimizing the economic and environmental bene-fits of ride-hailing and pooling [J]. Production and Operations Management, 2022, 32(3): 904-929.
[28]Wang Wensi, Yu Bin, Fang Ke, et al. Causal effect of metro operation on regional resident mobility considering zone-based trip time relia-bility [J]. Tunnelling and Underground Space Technology, 2023, 135(5): 105041.
[29]潘志宏, 万智萍, 谢海明. 跨平台框架下基于移动感知的智慧公交应用研究 [J]. 计算机工程与应用, 2018, 54(19): 243-247, 260. (Pan Zhihong, Wan Zhiping, Xie Haiming. Research on intelligent public transport application based on mobile sensing in cross platform framework [J]. Computer Engineering and Applications, 2018, 54(19): 243-247, 260.)
[30]高文超, 李国良, 塔娜. 路网匹配算法综述 [J]. 软件学报, 2018, 29(2): 225-250. (Gao Wenchao, Li Guoliang, Ta Na. Survey of map matching algorithms [J]. Journal of Software, 2018, 29(2): 225-250.)
[31]李志超, 王艳东, 贾若霖. 基于多因子几何匹配的AI提取路网属性信息重建方法 [J]. 计算机应用研究, 2021, 38(12): 3688-3691, 3696. (Li Zhichao, Wang Yandong, Jia Ruolin. Attribute information reconstruction method of road network extracted by AI based on multi-factor geometric matching [J]. Application Research of Computers, 2021, 38(12): 3688-3691, 3696.)
[32]周杰英, 贺鹏飞, 邱荣发, 等. 融合随机森林和梯度提升树的入侵检测研究 [J]. 软件学报, 2021, 32(10): 3254-3265. (Zhou Jieying, He Pengfei, Qiu Rongfa, et al. Research on intrusion detection based on random forest and gradient boosting tree [J]. Journal of Software, 2021, 32(10): 3254-3265.)
[33]崔展齐, 谢瑞麟, 陈翔, 等. DeepRanger: 覆盖制导的深度森林测试方法 [J]. 软件学报, 2023, 34(5): 2251-2267. (Cui Zhanqi, Xie Ruilin, Chen Xiang, et al. DeepRanger: coverage-guided deep forest testing approach [J]. Journal of Software, 2023, 34(5): 2251-2267.)
[34]Liu Jiahao, Jin Hanxin, Qiang Lei, et al. Hybrid two-phase task allocation for mobile crowd sensing [J]. Computer Engineering, 2022, 48(3): 139-145.
[35]李晓会, 董红斌. 基于E-CARGO模型的共乘出行匹配建模与优化方法[J]. 计算机应用, 2022, 42(3): 778-782. (Li Xiaohui, Dong Hongbin. Modeling and optimization method of ride-sharing matching based on E-CARGO model [J]. Journal of Computer Applications, 2022, 42(3): 778-782.)
[36]王子慧, 任宁宁, 周毅, 等. 优化多层次分析法的影响因素绩效评价模型 [J]. 计算机工程与设计, 2023, 44(7): 2039-2046. (Wang Zihui, Ren Ningning, Zhou Yi, et al. Optimizing perfor-mance evaluation model of influencing factors of AHP [J]. Computer Engineering and Design, 2023, 44(7): 2039-2046.)
[37]夏英, 石栀琦. 面向交通流量预测的多头注意力时空卷积图网络模型 [J]. 计算机应用研究, 2023, 40(3): 766-770. (Xia Ying, Shi Zhiqi. Multi-head attention spatio-temporal convolutional graph network for traffic flow prediction [J]. Application Research of Computers, 2023, 40(3): 766-770.)
[38]Gallo F, Sacco N, Corman F. Network-wide public transport occupancy prediction framework with multiple line interactions [J]. IEEE Open Journal of Intelligent Transportation Systems, 2023, 4: 815-832.
[39]Sun Dongxian, Guo Hongwei, Wang Wuhong. Vehicle trajectory prediction based on multivariate interaction modeling[J]. IEEE Access, 2023, 11: 131639-131650.
猜你喜欢
秦智(2024年9期)2024-12-31 00:00:00
湖南税务高等专科学校学报(2021年3期)2021-07-21 03:15:50
中国交通信息化(2021年12期)2021-02-12 03:23:54
大陆桥视野·上(2020年9期)2020-10-20 05:30:10
山东交通科技(2020年1期)2020-07-24 08:28:44
智富时代(2019年2期)2019-04-18 07:44:42
上海公路(2018年1期)2018-06-26 08:37:40
人民论坛(2016年37期)2016-12-28 11:09:32
中国市场(2016年36期)2016-10-19 04:47:59
公民与法治(2016年24期)2016-05-17 04:21:47