风机叶片小目标缺陷精准检测算法研究
2024-12-17 00:00:00张特明张对军崔帅黄科雷洋牛霈
中国新技术新产品 2024年7期


摘 要:小目标检测作为目标检测任务中的一种,存在检测率低、特征信息不足和漏检率较高等问题。针对这些问题,本文提出一种改进YOLOv5的小目标检测算法,将聚集-分发(Gather-and-Distribute,GD)机制加入YOLOv5网络,该机制通过改进卷积和自注意力2种操作提高了多尺度融合能力,用于捕获不同尺度间像素级的关系,取得了延迟和准确性之间的理想平衡。改进后的算法在自制的砂眼数据集上进行试验,平均检测精度mAP指标达到98.8%,与基线模型相比,mAP值提高了2.5%,验证了改进算法的可行性。
关键词:砂眼;小目标;YOLOv5;GD机制
中图分类号:TP 391" " " " " " " " " " " " " 文献标志码:A
目标检测在计算机视觉领域作用十分重要,其核心任务是对图像进行目标类别识别和目标位置定位。虽然小目标检测中的砂眼有检测率低、特征信息不足和漏检率较高等缺点,但是其在日常生活和工业领域中应用广泛,价值很高。
本文研究精确检测风机叶片砂眼,采用单阶段算法,通过改进 YOLOv5 提升检测速度和准确率。
针对上文提到的检测率低、特征信息不足以及漏检率较高等缺点,本文将GD机制引入YOLOv5,改进了YOLOv5的信息交换和融合能力。GD机制通过全局融合多级特征,并将全局信息注入更高级别,信息传递高效,同时增加延迟。该模块可以在局部尺度上结合来自相邻层的特征[1],增强模型对目标的表示能力和感知能力。通过这种融合,模型可以更好地捕捉目标的细节和上下文信息,提高小目标和稀疏目标的检测准确度。本研究在自制的砂眼数据集上进行了验证,与YOLOv5网络相比,改进算法在识别精度P、召回率R、平均检测精度mAP上均有提升。
1 YOLOv5的改进
1.1 YOLOv5
YOLOv5分为Backbone、Neck以及 Head 3个部分。Backbone作为主干网络,作用是接收输入图像并通过一系列卷积、池化和激活操作来提取图像中的特征信息[3]。YOLOv5 模型结构如图1所示。Backbone可以将原始图像转换为一系列特征层,包括图像中的语义和局部特征。将这些特征层传递给后续的网络模块(例如FPN和Yolo Head)进一步处理。
Neck对特征层进行多尺度特征融合,并将这些特征传递给预测层。YOLOv5采用FPN特征金字塔结构,FPN可以使用自上向下和自下向上2种路径来构建多尺度特征金字塔[3],以便在目标检测和语义分割等任务中提高性能。自上向下路径利用上采样和特征融合来融合不同层次特征,自下向上路径利用一个卷积层来融合不同层次特征。这种方式有助于模型在不同尺度上更好地理解和处理输入数据,从而提高模型的鲁棒性和准确性。
Head是目标检测头,作用是对特征金字塔进行目标检测,它包括卷积层、池化层和全连接层等。在YOLOv5中,Head模块主要负责对骨干网络提取的特征图进行多尺度目标检测。
1.2 GD机制
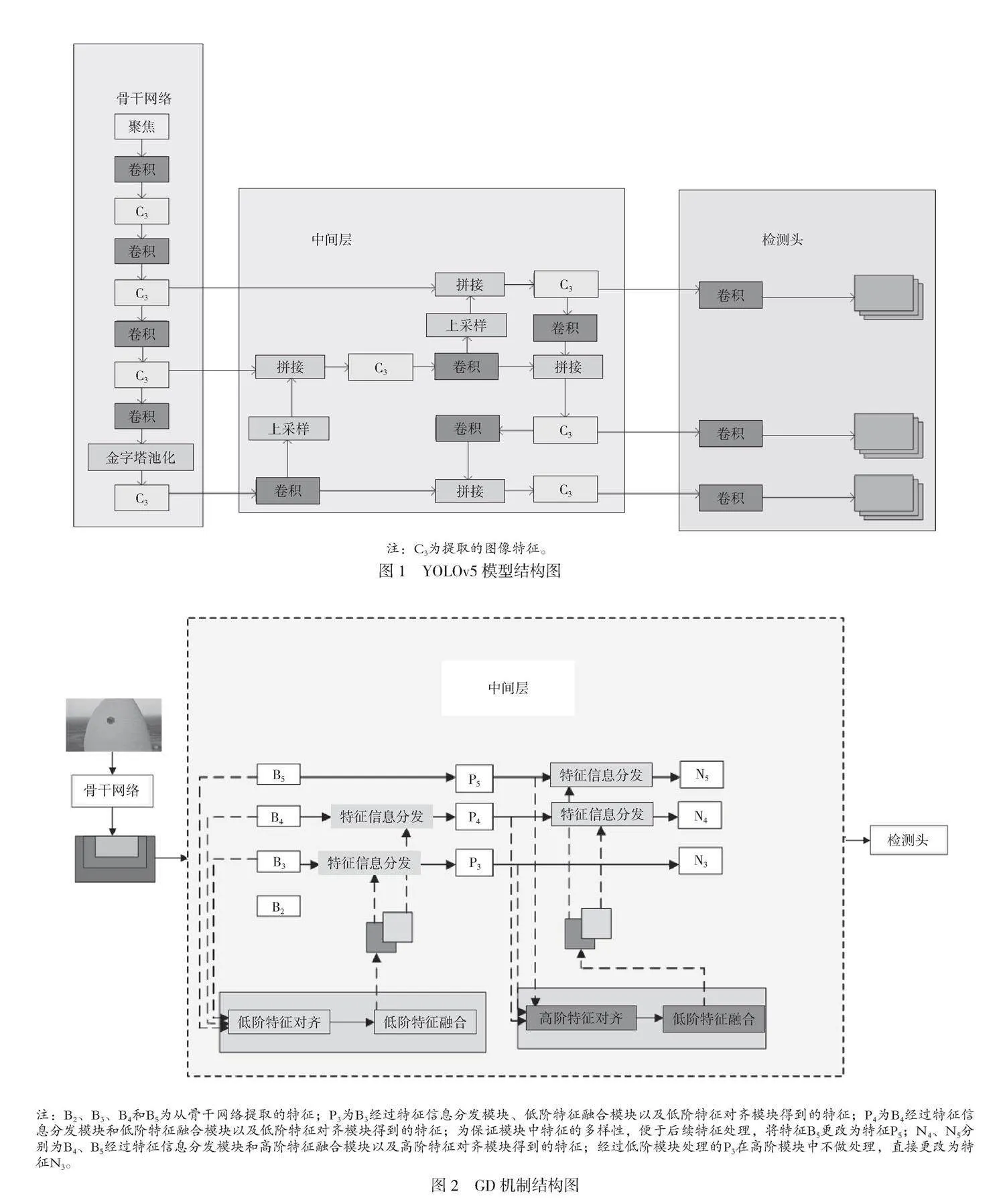
虽然YOLO算法可以通过FPN和PANet进行多尺度特征融合[2],但是仍然在一定程度上存在特征信息的提取问题。FPN网络的间隔层之间的信息融合需要经过中间层,不能直接融合,这样就会导致融合速度低、信息丢失等一系列问题,与风机叶片的砂眼检测相比,YOLO算法存在检测率低、特征信息不足和漏检率较高等缺点。由于传统的YOLO算法不能准确检测类似小目标,因此本文引入GD机制,结构如图2所示。
GD机制收集和分发数据,包括特征对齐模块(FAM)、特征信息融合模块(IFM)以及特征信息分发模块(Inject)3个模块[1]。特征对齐模块收集backbone不同尺度的特征图,利用上采样或下采样的方式对齐。特征信息融合模块将对齐后的特征生成全局特征,利用Split模块拆分为2个部分,针对其他尺度进行分发。特征信息分发模块利用自注意力机制将全局特征分割后分发至各层级。在Neck阶段,Low-GD代替了原始网络中PANet模块的上采样融合阶段,High-GD代替了原始网络中PANet模块的下采样融合阶段。
1.2.1 Low-GD机制
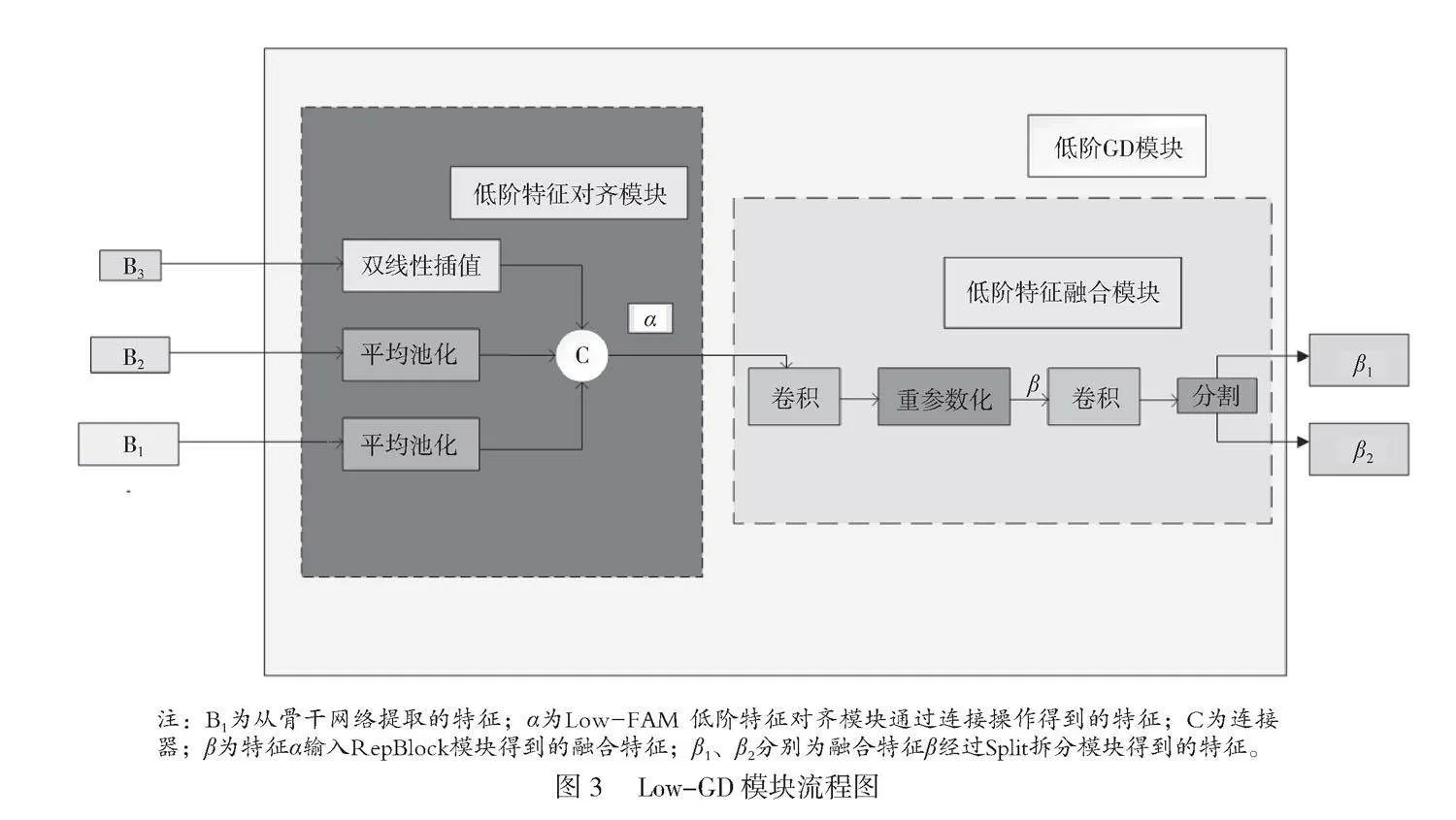
Low-GD机制用来提取并融合大尺寸的特征信息。Low-GD分为3个模块,分别是Low-FAM 低阶特征对齐模块、Low-IFM 低阶信息融合模块以及Low-Inject信息分发模块。Low-FAM 低阶特征对齐模块对小特征图进行双线性插值,随后进行上采样,平尺化处理大特征图,完成下采样。Low-IFM 低阶信息融合模块包括卷积层模块、RepBlock模块以及Split拆分模块,在Low-FAM 低阶特征对齐模块通过连接操作得到特征α后,输入RepBlock模块得到融合特征β,在卷积层模块完成调节通道后,融合特征β可以适应不同模型大小,在Split拆分模块中拆分特征,得到β1和β2,提取特征。Low-Inject信息分发模块的作用是融合相邻2层的特征,得到转入高阶段采集-分发分支(High-GD)模块的特征ε,进行下采样。Low-GD 模块流程如图3所示。
1.2.2 High-GD机制
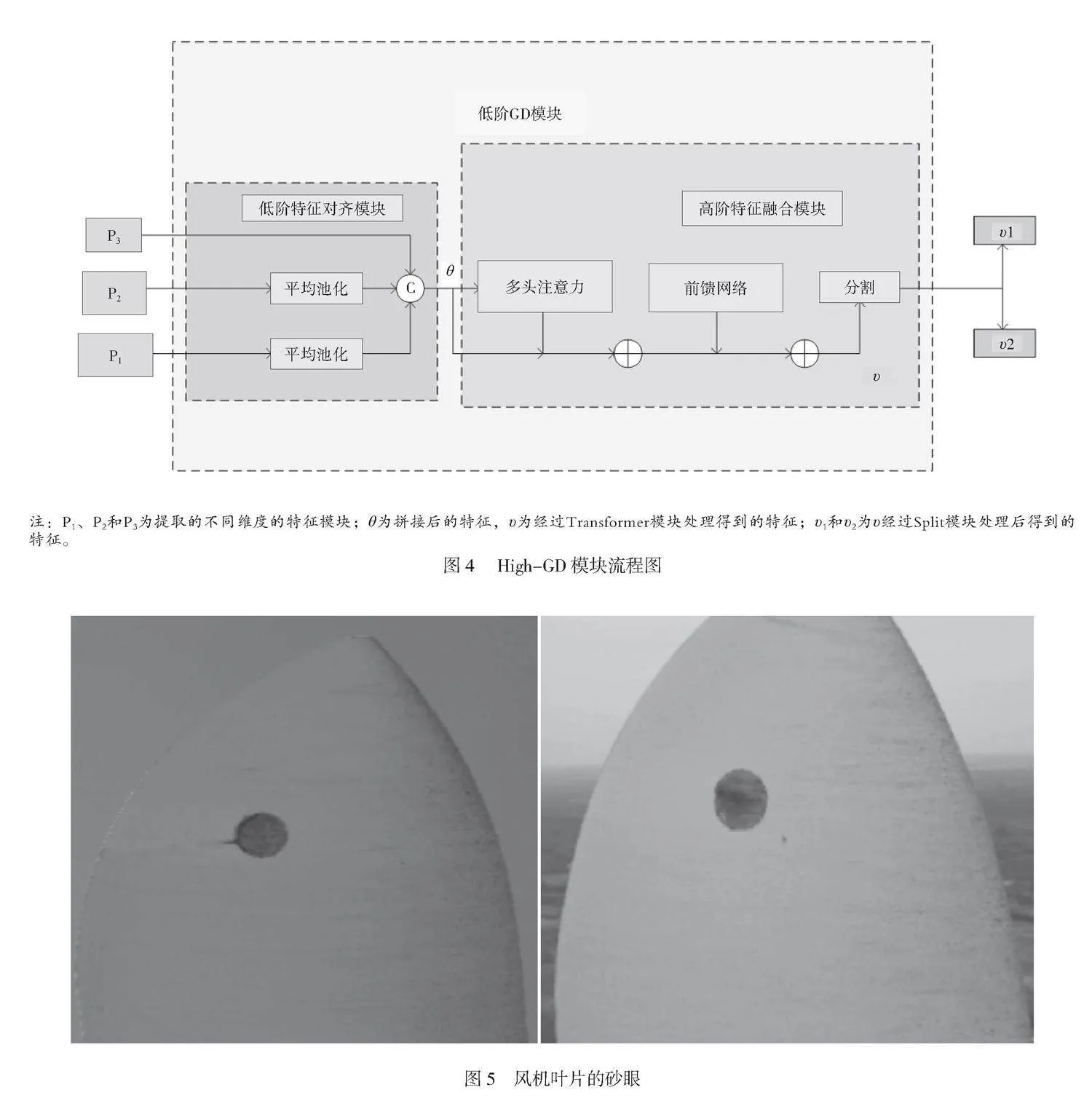
High-GD机制的流程与Low-GD机制的流程相似,同样有3个模块,分别为High-FAM高阶特征对齐模块、High-IFM高阶特征融合模块以及High-Inject信息分发模块。与Low-GD模块不同,从Low-GD机制得到特征ε后,通过High-FAM高阶特征对齐模块完成平均池化,将输入特征的size降维至统一尺寸,再通过链接操作合并特征,得到特征θ。High-IFM由Split拆分模块和Transformer模块中的多头注意力机制(MULTI-Head Attention)以及前馈网络(Feed-Forward Network)组成。完成连接操作后,特征θ经过Transformer模块处理得到特征ϑ,为了保证完成拆分操作,在High-GD模块加入一个卷积模块调整通道,经过Split模块,特征ϑ拆分得到ϑ1以及ϑ2,High-Inject信息分发模块融合特征信息。High-GD模块流程
如图4所示。
1.3 技术细节
小目标具有检测率低、特征信息不足和漏检率较高等缺点,传统的YOLOv5网络颈部结构中的FPN结构由多个分支组成,用于多尺度特征融合,其只能完全融合相邻层的特征,其他层的信息须通过“递归”方式间接获得。因此本文将上述GD机制替代传统的YOLOv5网络的Neck中间层,利用特征的对齐和融合,将各层次信息分配至不同层次,避免了传统FPN结构中固有的信息丢失,并在不显著增加延迟的情况下增强了中间层的信息融合能力,在自制的数据集上,与传统的YOLOv5网络相比,检测精度提升2.5%。
2 试验结果与分析
2.1 数据集介绍
为保证试验结果可靠、准确,本次试验采用自制的砂眼数据集,砂眼如图5所示,经过挑选,得到320张原始图片,为了防止试验中出现过拟合现象,影响试验结果,本研究将原始图片经过翻转、加噪和剪裁等数据增强方式扩充至1 800张,图片的初始分辨率为640 ppi×640 ppi。数据增强方式见表1。增强后的砂眼数据集按照8∶2的比例分配,有1" 440张图片作为训练集,360张图片作为验证集。
表1 数据增强方式
增强方式 描述
颜色变化 调整图像的对比度、饱和度
翻转 左右或上下翻转图像
剪裁 随机在图像中剪裁一块区域作为新的图像
加噪 在图像上随机添加噪声
旋转 按照一定角度随机旋转图片
2.2 试验评价指标
本试验在GPU 版本为NVIDIA GeForce GTX 1080 Ti的环境下完成,训练过程一共300次,优化器为SGD,batch_size为16。本文使用识别精度P、召回率R和平均检测精度mAP 这3个指标来评估目标检测模型[4]的性能。其中,AP和mAP是通过计算模型的精准度和召回率来确定的。精准度和召回率的计算过程如公式(1)、公式(2)所示。
(1)
(2)
式中:TP为检测的缺陷类别与真实缺陷类别相同的样本数量;FP为检测到的缺陷类别与真实缺陷类别不相同的样本数量;FN为真实存在的缺陷目标未被算法正确检测出的样本数量[5];计算所有风机叶片缺陷类别精准度的平均值,计算过程如公式(3)所示。
(3)
式中:AP(n)为计算风机叶片表面缺陷单类别精准度的平均准确率。;mAP为对准确率(Precision)和召回率(Recall)的综合考量,可以更全面地评估模型的有效性;n为平均精度的数量;N为平均精度数量的和。
2.3 试验结果分析
为了验证模型对风机叶片砂眼缺陷的检测效果,使用同一数据集,试验设置信息不变,以保证试验的公平性,将YOLOv5与本文的模型进行对比试验,对比指标为mAP,对比结果见表2。
表2 试验结果对比
识别精度/% 召回率/% 平均检测精度/%
YOLOv5 96.5" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " 96.5 96.3
本文算法 98.6 98.5 98.8
从表2可以看出,与YOLOv5相比,本试验在识别精度P、召回率R以及平均检测精度mAP上达到了98.6%、98.5%和98.8%。能够对风机叶片砂眼进行精准检测。
3 结论
本文针对小目标存在的检测率低、特征信息不足和漏检率较高等缺点,在原来的YOLOv5基础上,将Gather-and-Distribute机制引入YOLOv5网络中,通过改进卷积和自注意力机制增强了多尺度融合能力,在模型尺度上取得了延迟和准确性之间的理想平衡,通过自制的砂眼数据集证明了试验的可靠性和准确性。本试验数据集有限,还未解决数据集的过拟合问题,后续将增加数据集的数量,提升质量,优化试验算法,更精准地检测小目标。
参考文献
[1]WANG C, HE W, NIE Y, et al. Gold-YOLO: Efficient object
detector via gather-and-distribute mechanism[J]. Advances in neural
information processing systems,2023,2309(11331):36.
[2]谢椿辉,吴金明,徐怀宇. 改进YOLOv5的无人机影像小目标检测算法[J].计算机工程与应用,2023,59(9):198-206.
[3]刘芬,孙杰,张帅,等.基于YOLOv5的红外船舶目标检测算法[J].红外与激光工程,2023,52(10):222-233.
[4]张淳,葛毅,任越,等. 基于优化的DeeplabV3+网络和高分影像分割浮萍型农村黑臭水体[J].遥感技术与应用, 2023,38(6):1433-1444.
[5]张燊,胡林,孙祥娥,等.基于注意力机制及多尺度融合的红外船舶检测[J].激光与光电子学进展,2023,60(22):256-262.
通信作者:牛霈(1977—),男, 硕士,副高级工程师,主要研究方向为新能源数字化转型、新能源智慧运维技术。
电子邮箱:870631794@qq.com。
猜你喜欢
价值工程(2016年31期)2016-12-03 23:39:49
科学之友(2016年10期)2016-10-21 23:57:13
瞭望东方周刊(2016年35期)2016-10-17 18:22:22
IT经理世界(2016年19期)2016-10-12 12:12:37
中国石油石化(2015年12期)2015-04-20 08:54:52
环球人文地理·评论版(2014年6期)2014-09-04 22:51:18
科技创新与应用(2014年4期)2014-02-10 17:12:32