
改进灰色神经网络导航在无人机巡线中的应用
2024-12-10 00:00:00李耀魏帅齐王文
中国新技术新产品 2024年19期





摘 要:为了消除无人机导航系统的误差,本文设计了改进灰色神经网络GNSS/SINS无人机电力巡线导航系统,基于Kalman算法对GNSS和SINS这2种导航数据进行融合。在GNSS信号缺失的情况下,改进灰色神经网络来预测缺失部分的数据,再结合SINS的数据对无人机的位置进行精准预测。算法设计完成后,运用MATLAB软件模拟验证系统算法的功能。结果显示,其位置预测数据精度良好,证明该系统能够提升无人机的导航效果。
关键词:GNSS/SINS组合导航系统;改进灰色神经网络;无人机电力巡线
中图分类号:TN 967" " " 文献标志码:A
全球导航卫星系统(Global Navigation Satellite System,GNSS)和捷联惯导系统(Strapdown Inertial Navigation System,SINS)是电力巡线无人机的主要导航方式,GNSS导航精度高,但是容易受到复杂地形和电磁因素的干扰,导致信号缺失;SINS导航精度较差,但是几乎不受其他因素影响。整合以上2种导航方式,能够弥补各自的缺陷,进一步提高导航精度。本文针对GNSS容易出现数据间歇性缺失的问题,创新性地引入改进灰色神经网络模型,预测缺失部分的数据,建立GNSS/SINS组合导航技术,显著降低无人机的导航误差。
1 GNSS/SINS无人机电力巡线导航系统设计
1.1 导航系统整体架构
无人机电力巡线作业系统主要采用2种导航定位技术,分别为GNSS和SINS。GNSS导航系统能够为无人机提供长时间、大范围的导航服务。SINS导航系统无须依赖外部系统,能够自主完成导航任务。这2类导航系统各自存在一定的局限性,GNSS受到山地复杂环境的干扰,容易出现信号中断的情况[1]。SINS导航精度较差,误差会不断累积。
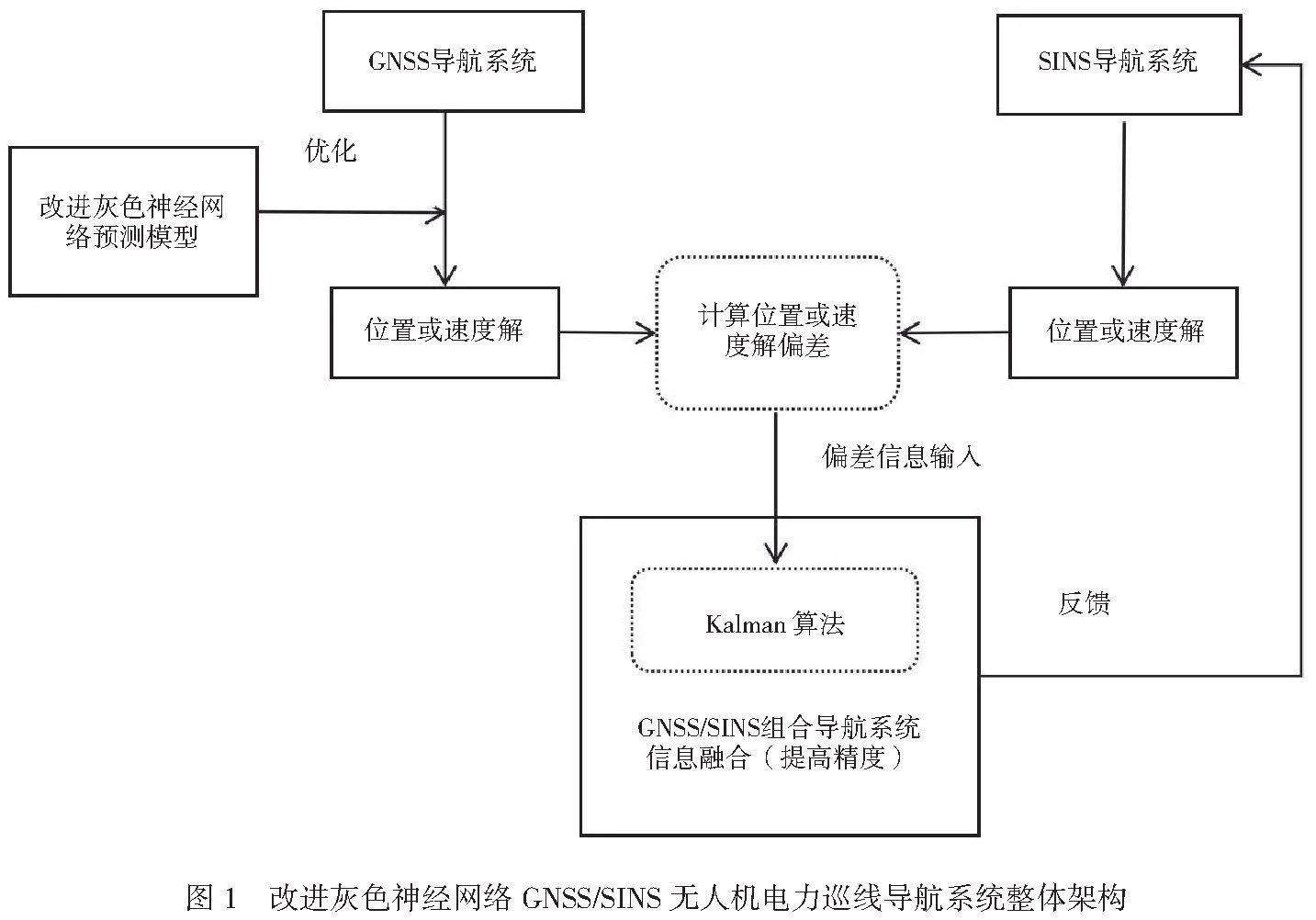
本文设计的改进灰色神经网络GNSS/SINS无人机电力巡线导航系统对GNSS和SINS进行整合,利用算法工具提高整体的导航精度,整体架构如图1所示。
1.2 基于改进灰色神经网络模型的GNSS导航优化
在无人机电力巡线过程中,GNSS导航系统受到复杂环境干扰,有可能出现短时信号缺失的情况,导致GNSS/SINS组合导航系统不能进行信息融合。在这个情况下,可以改进灰色神经网络模型预测缺失的信号,保证后续信息融合模块正常运行。
1.2.1 改进灰色神经网络预测模型整体架构
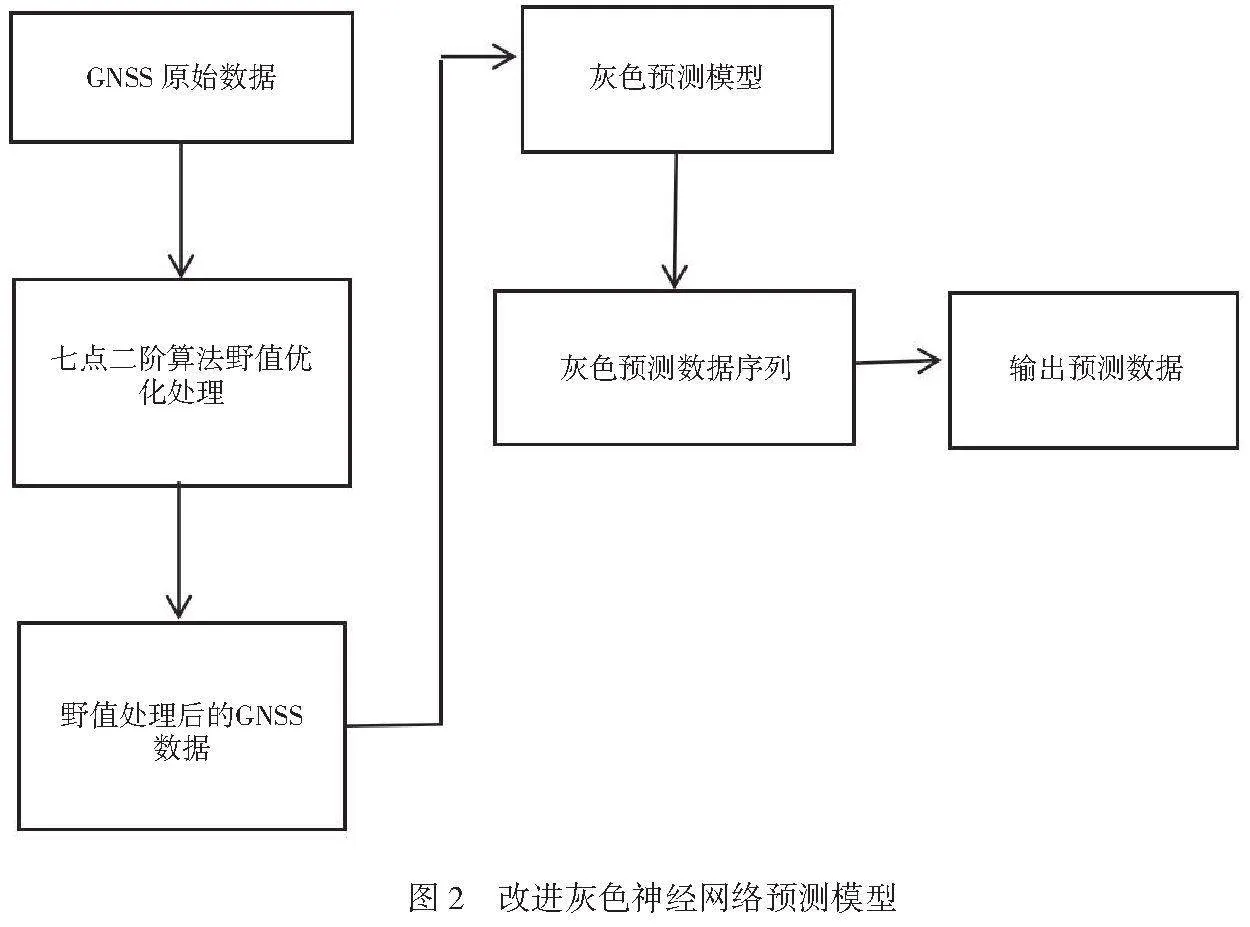
改进灰色神经网络预测模型融合七点二阶算法和灰色预测模型(Grey Models,GM)。GNSS系统利用接收天线采集原始数据后,根据七点二阶算法处理原始数据,再使用改进灰色神经网络预测模型进行缺失数据预测,模型如图2所示。
1.2.2 改进灰色神经网络预测模型设计
1.2.2.1 基于七点二阶算法的野值优化
野值是GNSS原始数据中的离散值,其特点为明显偏离正常范围,野值的存在降低了原始数据的平滑性和预测模型的精度[2]。基于此,利用七点二阶算法对原始数据进行处理,剔除原始数据中的离散值,增强原始数据的平滑性,提升模型的预测精度,该算法判断野值的步骤如下。
将GNSS系统采集的原始数据记为yi,i=7,8,...,n。i初始取值为7,原始数据中的前6项分别为yi-6、yi-5、yi-4、yi-3、yi-2和yi-1。采用七点二阶算法对原数据进行插值处理,如公式(1)所示。
yi'=(5yi-6-3yi-5-6yi-4+3yi-2+15yi-1+32yi)/42" (1)
式中:yi'为yi对应的插值。
野值的判断条件如公式(2)所示。
式中:yk为第k个采样时刻或数据点的观测值,由于i=k-6,因此yk对应原始数据集中的yi+6;yk'为yk对应的插值处理结果;k为当前处理的数据点的位置或时间步;i为索引,其作用是表示迭代或循环过程中的不同位置;yi为在特定范围内第i个数据点的观测值;yi'为该观测值的映射;E为辨识常数。当yk满足公式(2)时,属于野值,应该予以剔除。
1.2.2.2 基于灰色预测模型获取灰色预测数据序列
GNSS系统的原始数据有可能出现缺失,可以根据前期获得的数据预测缺失的部分。将野值处理后的GNSS原始数据输入灰色预测模型中,利用累加生成操作(Accumulated Generating Operation,AGO)进行预测,获取灰色预测数据序列[3]。
将输入灰色预测模型的原始数据集记为X(0),X(0)={X(0) (1),X(0) (2),...,X(0) (n)},X(0) (n)为集合X(0)中的元素。根据灰色预测模型的相关原理计算X(0)的预测序列,如公式(3)所示。
式中:Xp(0)(k+1)为预测值,k=1,2,3,...,n。将k代入公式(3),得到对应的预测数据序列。a为发展系数;b为灰作用量。
1.3 基于Kalman算法的GNSS/SINS导航信息融合
由GNSS/SINS组合导航系统的工作原理可知,GNSS导航系统和SINS导航系统均可以产生无人机的位置解和速度解,但是2种导航系统的输出结果通常存在一定偏差。基于改进灰色神经网络的GNSS/SINS无人机电力巡线导航系统可以对2类系统输出结果进行融合,提升导航精度。信息融合方法如下。
1.3.1 SINS导航系统误差
Kalman滤波算法能够根据输入数据估算系统的最佳运行状态。将GNSS导航系统与SINS导航系统输出结果的差值输入Kalman滤波算法程序中,根据算法程序对数据进行融合处理,提升组合系统的导航精度。当预测系统状态时,该算法须利用SINS导航系统的误差构建GNSS/SINS组合导航系统的状态转移方程。
SINS解算机械编排获取载体的位置坐标,受到传感器和机械编排的影响,SINS系统有可能出现误差。将系统导航坐标与实际导航坐标之间的失准角向量记为φ,φ=[φN" φE" φD]T,其中φN、φE和φD为NED坐标系中N轴、E轴和D轴对应的失准角分量[4]。根据失准角构建实际姿态矩阵和理想无误差姿态矩阵的方程,两侧同时进行微分,计算失准角的误差方程,如公式(4)所示。
φ'=-ωn in×φ+δωn in-Cbnδωb ib (4)
式中:φ'为含误差的失准角;ωn in为惯性坐标系i相对导航坐标系n的转动角速度在n系中的矢量;δ为实际物理量与理想物理量之间的误差;Cbn为无误差情况下的导航系统姿态矩阵;ωb ib为SINS系统陀螺仪输出的角速度。对系统计算速度和理想速度的方程进行微分,得到无人机的速度误差方程,如公式(5)所示 [5]。
δvn=Cbnδf b+Cbnf b·φ-(2ωien+ωn en)·δvn+vn×(2δωn ie+δωn en)+δgIn
(5)
式中:vn为理想情况无人机相对地面的速度;δvn为速度误差;f b为惯性导航中的加表零偏;δf b为加表零偏误差量;ωn ie为地球自转角速度在导航坐标系中的分量;ωn en为导航坐标系n相对地心地固坐标系e的转动角速度在n系中的矢量;gIn为导航系统中的重力参数。采用相同的方法对无人机高程、纬度和经度进行分析,得到相应的误差方程。以高程为例,其对应的误差方程为δh=-δvD,h为理想高程参数,δh为包括误差的高程;vD为NED坐标系中D轴(垂直于地球表面的坐标轴)的速度。
1.3.2 基于SINS误差的组合导航系统Kalman算法状态方程
在第1.3.1节中,对SINS导航系统的误差分量进行分离,包括失准角、速度、高程、纬度和经度,其中纬度、经度和高程体现了无人飞行器的位置。以SINS误差为基础,根据Kalman算法建立GNSS/SINS组合导航系统的状态方程,如公式(6)所示。
式中:δ为误差系数;δr'n为Kalman算法修正后的位置误差矩阵;δv'n为Kalman算法修正后速度误差矩阵;φ'、bg'、ba'、r'n和v'n为参数φ、bg、ba、rn和vn经过Kalman算法滤波处理后的结果;F为系统状态矩阵;rn为无人机在导航坐标中的位置矩阵;δrn为位置误差矩阵;vn为理想情况下无人机相对地面的速度矩阵;δvn为速度误差矩阵;bg为陀螺仪的零偏误差;ba为加速度计的零偏误差;G为过程噪声矩阵;w为高斯白噪声向量。
1.3.3 GNSS位置更新
GNSS/SINS组合导航系统需要对GNSS和SINS各自的定位解算结果进行融合,但是2种导航系统的定位解算结果存在差异,前者为GNSS天线的位置,后者为惯性测量单元(IMU)的位置[6]。因此,当融合2种解算结果时,需要修正定位目标不同产生的误差。
GNSS天线与惯性测量单元的位置关系如公式(7)所示。
rn GNSS=rn IMU+D-1 RCbnl b GNSS " " " " " " " " " " " " " " " " " " " " " " " " " " " "(7)
式中:rn GNSS为导航坐标系中GNSS天线相位中心的位置矢量;rn IMU为惯性测量单元中心的位置矢量;D-1 R为位置修正矩阵;lb GNSS为杆臂的位置矢量。在GNSS信号缺失的情况下,利用公式(7)更新GNSS天线中心位置。
2 GNSS/SINS无人机电力巡线导航系统验证
2.1 仿真试验设计
2.1.1 试验目标
由上文可知,改进灰色神经网络GNSS/SINS无人机电力巡线导航系统的设计重点为野值处理、基于改进灰色神经网络的GNSS缺失数据预测、GNSS/SINS组合导航信息融合以及导航信息预测,试验目标为验证以上3个核心功能。
2.1.2 电力巡线场景选取
无人机电力巡线的场景比较复杂,包括平原、丘陵和山地等。在真实场景中,丘陵、山地复杂的地势、多样的植被会形成干扰,容易导致GNSS信号缺失。为了验证导航算法对野值的处理效果和对缺失数据的预测效果,选取丘陵山地场景。
2.1.3 仿真方法以及参数设置
本文利用MATLAB搭建仿真环境,设置无人机的初始飞行速度,使其在特定高度进行周期性飞行。模拟开始后,当采集导航定位数据时,在9 s、45 s插入离散值(野值)。GNSS导航系统在50 s~65 s出现信号缺失的情况。其他仿真参数见表1。
2.2 仿真数据分析
2.2.1 野值处理仿真数据分析
野值处理的目标是准确识别、剔除超过正常范围的离散值,野值出现的时间点为仿真开始后的9 s和45 s,利用七点二阶算法进行处理,从速度和位置2个方面评价野值处理的效果。
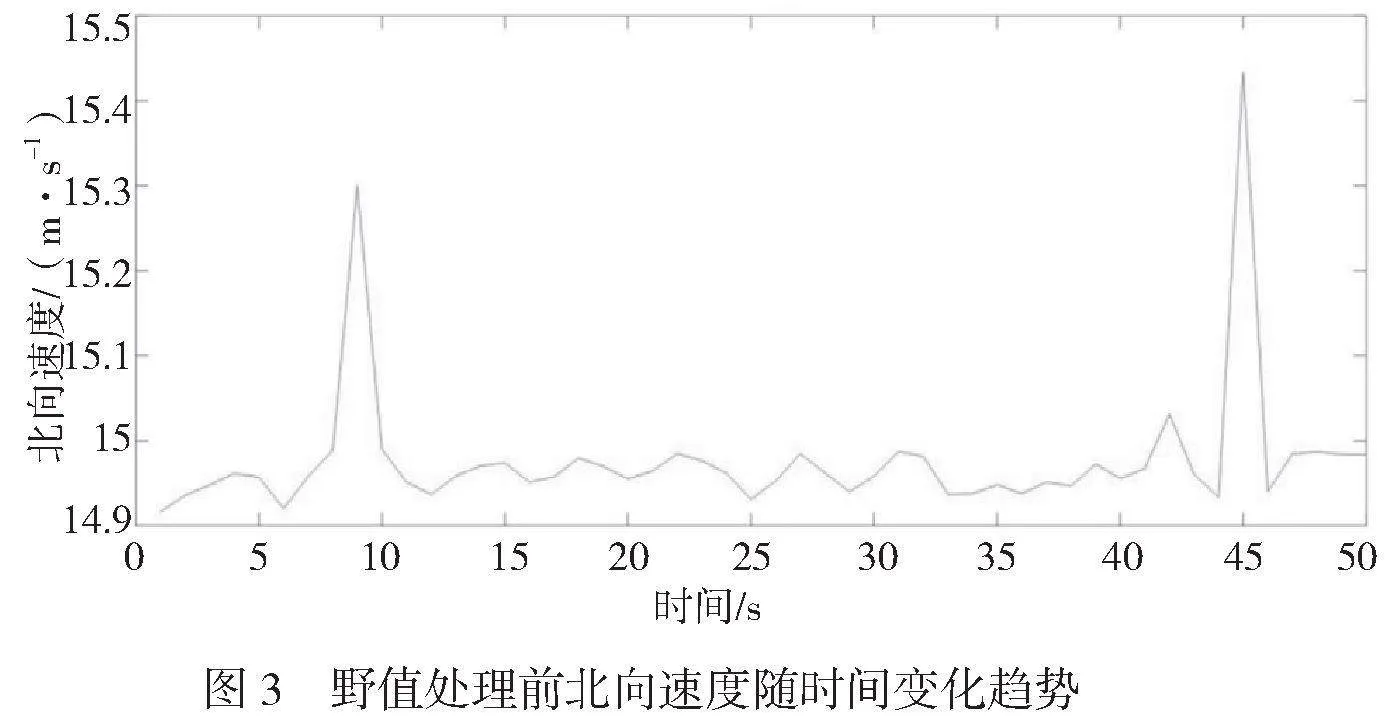
2.2.1.1 基于无人机速度的野值处理效果分析
在野值处理前,北向和东向的速度在9 s和45 s出现了明显的离散点。以北向速度为例,其变化趋势如图3所示。在0~50 s,正常速度约为14.9 m/s~15.0 m/s,2个野值分别为15.3 m/s、15.4 m/s。经过处理后,0~50 s的北向速度为
14.9 m/s~15.0 m/s,东向速度的2个野值为14.6 m/s、14.9 m/s。经过处理后,0~50 s的速度为14.15 m/s~14.30 m/s。说明七点二阶算法对速度野值的处理效果良好。
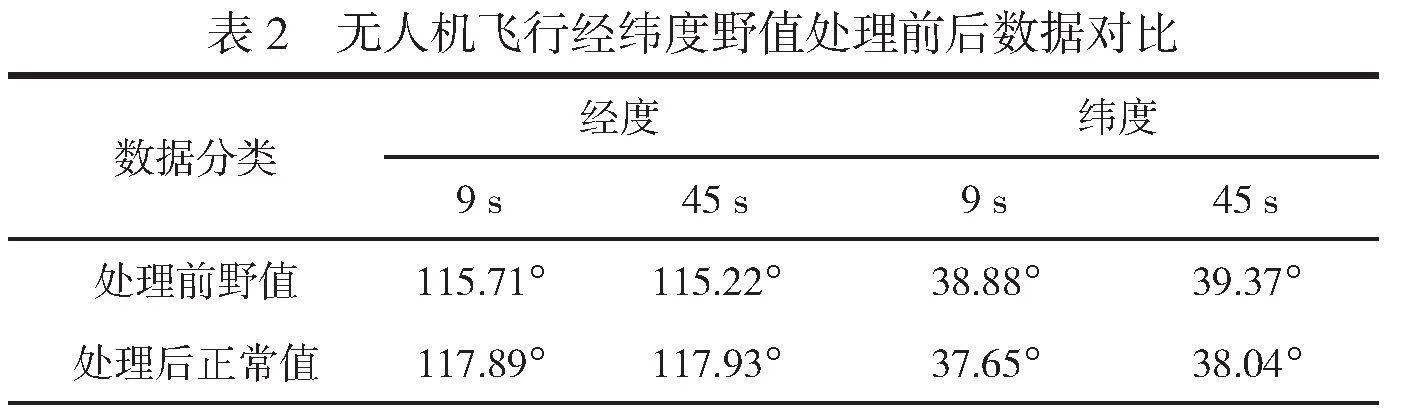
2.2.1.2 基于无人机位置的野值处理效果分析
经度和纬度数据能够体现无人机的位置,对处理前后的经纬度野值数据进行对比,得到的结果见表2。由表2可知,经过七点二阶算法优化,野值明显下降,回落至正常范围。
2.2.2 改进灰色神经网络对GNSS缺失数据预测效果分析
将传统灰色神经网络和改进灰色神经网络作为对照组,以0~50 s采集的正常数据为依据,利用2种算法对50 s~65 s缺失的数据进行预测,包括北向速度、东向速度、经度以及纬度,效果对比见表3。由表3可知,利用改进灰色神经网络预测缺失的GNSS数据,其平均误差、均方误差和最大误差均小于传统灰色神经网络,预测精度更高。
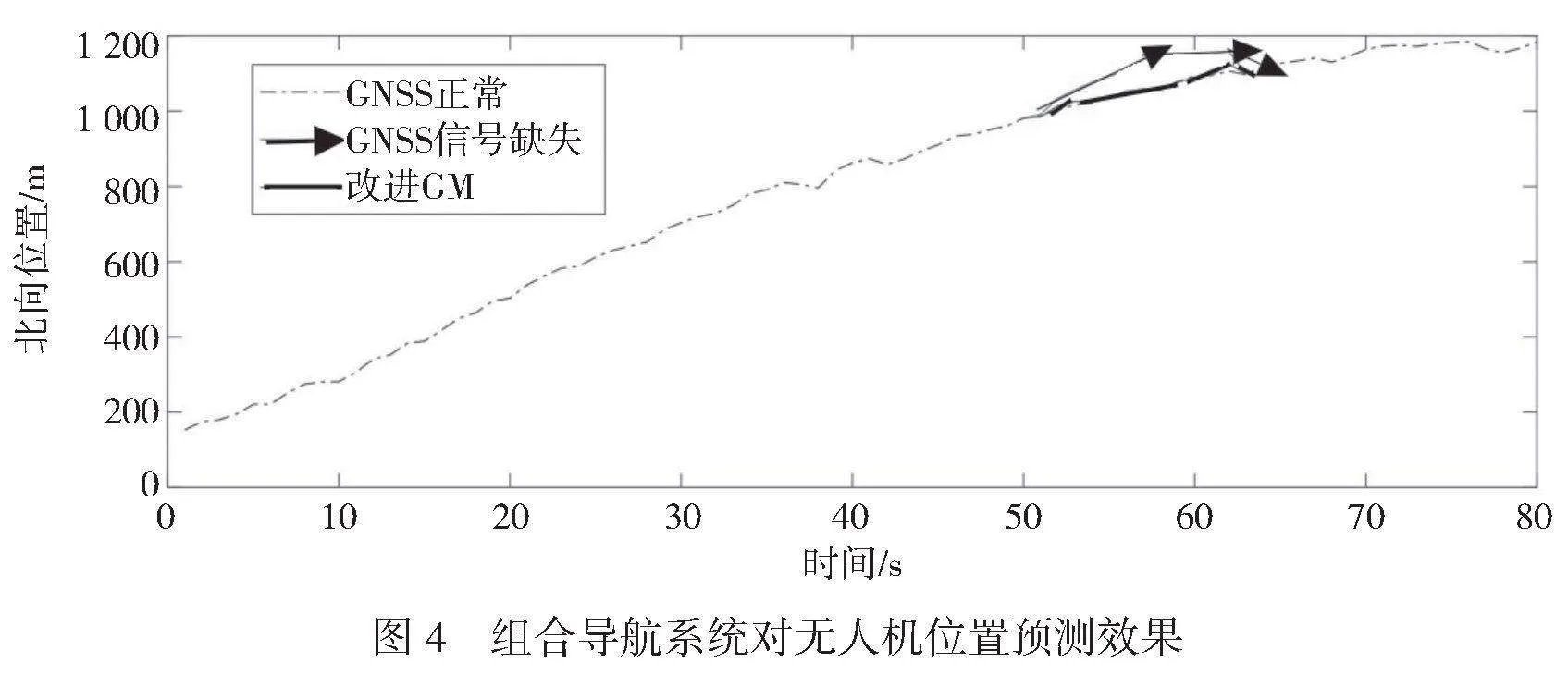
2.2.3 基于GNSS/SINS组合导航的无人机位置预测
将SINS数据和GNSS数据进行融合,能够进一步提高系统对无人机位置的预测精度,消除导航误差。利用改进灰色神经网络GNSS/SINS组合导航系统模拟位置预测效果,模拟结果如图4所示。其中,虚线为GNSS未缺失的正常数据,箭头线为GNSS信号缺失、仅依靠SINS进行导航的数据,实线为改进灰色神经网络GNSS/SINS组合导航系统的位置预测数据(改进GM)。组合导航系统的预测结果与正常的GNSS数据高度一致,位置精度预测效果良好。
3 结论
针对无人机GNSS导航容易出现数据缺失、SINS导航精度较差的问题,本文设计了改进灰色神经网络GNSS/SINS组合导航系统,得到以下结论。1)由于GNSS导航系统容易受到电磁信号或者复杂地形干扰,导致部分位置、速度数据缺失,不能提供可靠的导航,因此本文设计改进灰色神经网络模型,预测缺失部分的数据。模型采用七点二阶算法处理异常的离散值,提升数据的平滑性,并运用灰色神经网络进行预测。进行仿真测试,测试结果表明其预测精度较高。2)使用传统的GNSS/SINS组合导航方式,如果GNSS数据缺失,仅由SINS进行导航,那么误差会较大。改进灰色神经网络GNSS/SINS组合导航系统采用Kalman算法融合SINS数据和预测的GNSS数据,能够显著提升无人机的位置预测精度,进行精准导航。
参考文献
[1]杨春峰,于荣华,黄维,等.基于激光雷达和可见光立体测量的无人机电力巡线技术研究[J].自动化技术与应用,2021,40(10):177-180.
[2]郭迟,陈毅超,罗亚荣.一种世界坐标系下的GNSS/SINS松组合导航矩阵李群滤波算法[J].中国惯性技术学报,2024,32(3):242-249.
[3]王兆辉.基于数据融合的电力线巡检无人机安全距离研究[J].机械设计与制造工程,2022,51(11):53-56.
[4]王玮,潘新龙,林雪原,等.GNSS/SINS组合导航系统的改进变分贝叶斯自适应滤波算法[J].大地测量与地球动力学,2024,44(6):560-565.
[5]吴嘉琦,冉术兰.输电线路巡线中的无人机技术应用[J].电子技术,2023,52(9):242-243.
[6]陈广宇,张磊,赵磊,等.基于改进神经网络的电网线损率预测模型分析[J].自动化技术与应用,2022,41(5):130-133.
