车身控制模块手刹信号丢失故障分析
2024-12-09 00:00:00姚金平
汽车电器 2024年11期




【摘 要】文章针对车辆拉手刹后熄火,再次发动时不显示驻车制动灯的问题,对故障件进行深入测试,从理论分析和实际测试两方面分析出组合仪表无法显示驻车制动灯的主要原因,并为此问题提供软件解决方案。最后经过大量实车测试验证发现,更改手刹CAN信号处理方式能够有效解决这一难题。
【关键词】车身控制模块;CAN信号;软件更新
中图分类号:U463.6 文献标识码:B 文章编号:1003-8639( 2024 )11-0105-03
Fault Analysis for the Loss of Handbrake Signal in the BCM
【Abstract】This article referring to the problem that the combined instrument can’t display the parking brake light,when pulling the handbrake before turning off then start again, we have conducted extensive tests to its fault. We summarized the main reasons from two aspects, which is theoretical analysis and practical tests. And we proposed a software programme to solve this problem. In the end, the real vehicle test proved that the change the handbrake CAN signal processing method can solve this problem.
【Key words】BCM;CAN signal;software update
车辆车身控制模块BCM(Body Control Module)的内部电路控制复杂且市场索赔率比较高,大多数的车身控制模块故障件返回之后故障很难再现,造成査找原因困难、分析过程耗时长等问题。本文针对此问题,对出现的BCM问题进行梳理总结,为后续分析判断BCM故障问题提供便利。
1 车身控制模块BCM功能
车身控制模块BCM是一款具有高集成程度的芯片。该装置的核心控制部件使用高频的收发器,其功能包括电源分配、对后窗进行加热、调节玻璃升降、电动后视镜、中控门锁、车灯和仪表的背光功能。BCM的内部安装了继电器和其他功率设备,这些设备能够控制较高功率的工作负载[1]。执行负载驱动的部件包括电机、电磁阀和电磁开关,能够直接处理较大的负载。在中国汽车领域,12V电配置中的车身控制部分使用了线性稳压,而24V电配置的车身控制部分选择了开关稳压器。BCM输入的电压区间在 -0.5~32V,而其输出电压可以是3.3V或5V。BCM的静态电流设计应该确保非常低,BCM应有过热保护且安装在远离热源的地方。车身控制模块BCM的系统架构如图1所示,车身上的部件功能可以通过车身控制模块实现控制,如车灯、车窗、门锁和室外温度等相关信息都在车身控制模块的系统网络架构中。车辆的各个电子设备间的信息可以共享,且一组信息数据可以同时供给多个部件使用。
车身控制模块不仅具备基础功能,还集成了逻辑与用户友好连接,例如,遥控锁车将自动关闭窗户,根据车辆速度和降雨情况自动调整雨刮速度,还有自动感应的前照灯和前照灯自动熄灭等特性。
2 车身控制模块BCM控制原理
2.1 输入控制
考虑到负载承受能力和抵抗干扰的实际需求,很多信号数值不适合直接接入微型控制器MCU处理。为了确保信号传输的安全与稳定,适当的输入电路(Input Circuitry)是至关重要的,主要功能是实现信号的隔离和调节。下文以切换信号和脉冲信号为实例进行深入描述。
首先,针对开关信号的输入,该信号主要通过测量检测系统与电源正极(+B)或者是接地(GND)的连接状况确定开关的响应状况。开关的信号存在两种状况:高电平面连接和地线连接。比如,点火开关激活时,BCM接收到的是电源正极(+B)的电信号强度;点火开关不激活时,BCM接收到的信号是悬空的。当车门打开,车门的接触开关会自动接通,随后会向BCM发出接地指示;当车门关好后,BCM接收到的信号会呈现悬空的现象,此时的状态也会改变。信号的这种状态变化恰好是需要密切注意的信号电压振幅的主要原因。
脉冲信号输入属于关键的信号类型,其核心在于具有周期性切换信号的特性。此类信号在解码器的数据录入、气囊的状态监测和车速信息探测等多个应用领域中有着广泛的用途[2]。为了保证任何电子系统内部信号的高效传递和通信,电子部分的各种接口都需要进行严格的软硬件匹配。车辆的车身控制模块BCM内的处理电路系统保持了逻辑电平的稳定性。当外部的指令尝试调整这些逻辑状态时,这些信号将最终由BCM辨识并加以处理。为了确保信号识别的精准度,通常需要高电平的可靠性高于0.7V,而较低电平则需要低于0.2V。如果输入电平为这两种情况之间,MCU可能出现逻辑上的错误判断。另外,过大的开关触摸电阻有可能引起输入信号的不同程度变化。
通信接口在车辆内部各电子控制单元以及车体控制组件的长程子模块间的数据互换方面起到了决定性的作用。基于ISO 11898标准,高速CAN总线(其运行速度可高达1MB/s)采纳了双线容错差动总线的方法,并展现出广泛的共模范围以及差动信号的先进技术,成为汽车内部电子模块主要的互连总线方式。另一方面,LIN总线支持低速(20kB/s)的单一线路有线网络,并且主要用来与信息娱乐系统的远程功能进行通信。通过使用CAN总线以及诊断性插头等不同接口,有能力实施对通信状况的监测和检测。在模拟信号的处理中,A/D转换技术扮演着重要角色。无论是传感器提供的降雨量、阳光强度,还是电流信息,如车窗电机的堵转情况,这些都是用于电压模拟测量的关键指标。在MCU无法直接检测信号电压微小的波动时,放大电路便被设计用以增加信号的幅度,以便准确地对信号进行处理。
在当代汽车系统中,射频识别技术(RFID)同样扮演着不可或缺的角色,尤其是在遥控式的解锁系统以及发动机制中的防盗锁定系统里。制造商会专门为点火开关钥匙(发动机防盗锁定系统)提供LFIC加密通信功能,同时也会为UHF(频率低于1GHz)接收器提供远程传输。这批机器拥有极低的能量消耗特点,能够对车门和报警系统进行有效的自动锁定和解锁,确保车辆的安全和安全。
2.2 输出控制
在汽车控制模块BCM内,负载驱动器起到了决定性的作用,这些驱动器主要涵盖了各种灯具和继电器的类型[3]。电源的开关和驱动设备负责操控车辆的外部灯,这些部件大部分直接被安装在控制系统上。继电器主要用于为高功率负载或其他电子元件供电,确保电力的持续稳定和安全性。汽车整体电池的充电和放电调节以及与其他ECU之间的负荷分配,均是通过BCM系统的电流监控功能来完成的。但是,考虑到MCU的I/O端的承载能力有其局限性,导致许多负荷难以直接由MCU进行控制。为此,有必要选用合适的输出接口电路作为连接,使得BCM能有效地控制外界负载。
3 CAN信号发送类型
CAN的信号传输类型可以主要被划分为周期型、事件型、重复和混合性质等几大类。前两种策略被广泛采纳和应用。
3.1 周期型(Cyclic)信号
周期型信号被称为信号发射,它是将固定的周期循环数据传输到总线上的行为。在下个周期的传输节点,将各个周期的更新数据传送出去。如果数据在周期里有超过两次更新,那么系统只会发送最新的更新内容。周期型的信号特别适用于数据的高变化频率或者需要实时同步的信息,每一项参数的输入都需在预定的时间周期内方可传送,具体的发送模式如图2所示。
3.2 事件型(On Change)信号
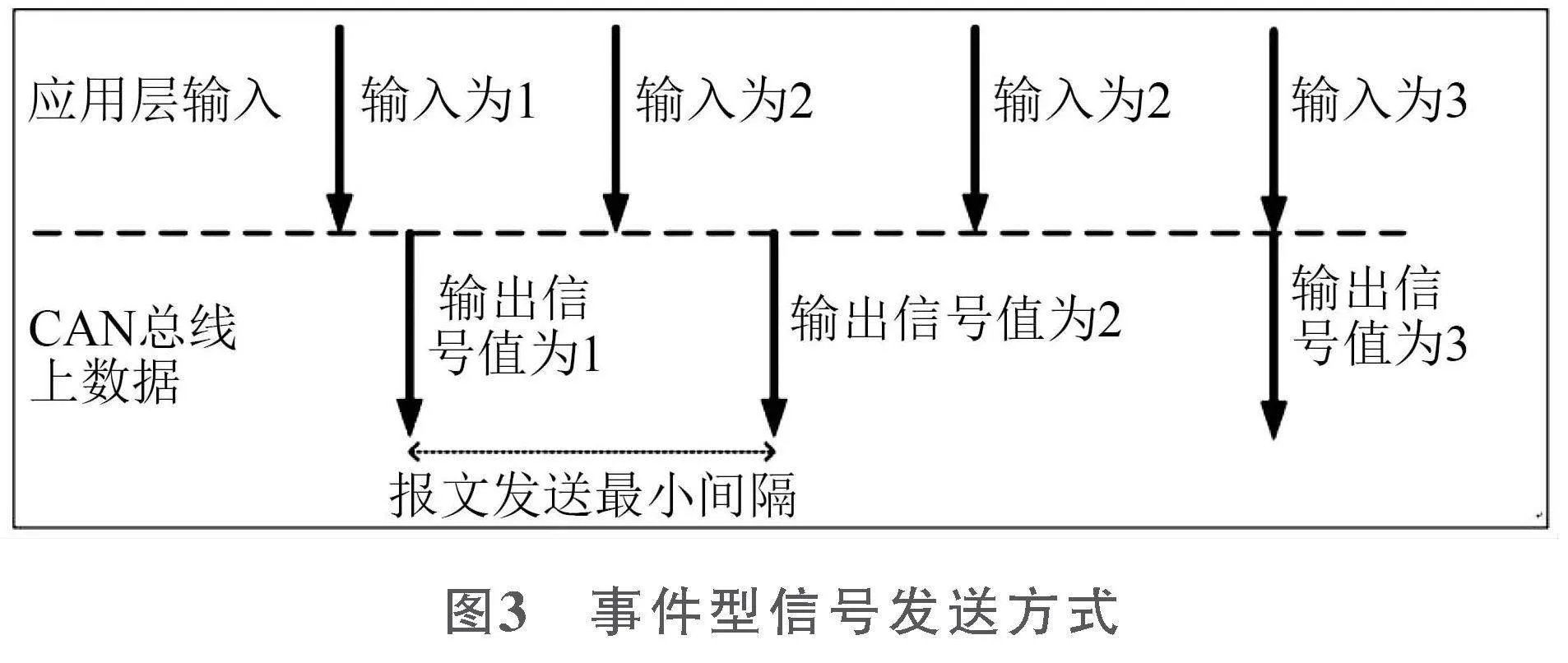
当信号类型为事件型时,这一信号即事件型发出的信号,并且只有当这些信号值发生改变时,该信号才会被发送至总线。如果数字保持不变,那么总线上不会显示出这个信号。事件型信号主要针对那些信号变化频繁的数据,而不需要对数据进行实时同步。仅当输入参数发生变动时,报文才可能传递给CAN总线。如果数据有重复输入,且参数保持不变,那么报文就不可能再被发送。需要注意,如果在报文生成的最短时间段中设置了多次数据变动,这些会被忽略;然而,如果报文最终被发送,就会发送最后一个接收到的数据数值,其发送模式如图3所示。
4 BCM手刹信号丢失具体故障分析
4.1 故障现象
车辆拉手刹后熄火,再次点火启动时组合仪表不显示驻车制动灯。对故障件进行了大量测试,故障重现率为100%。
4.2 故障车辆数据分析
对该故障车辆进行数据采集[4],当机械手刹拉起,CAN 0x313发送的手刹信号报文为0x2:Locked。当休眠后再次上电,此时机械手刹处于拉起状态,CAN 0x313发送的手刹信号报文变为0x1:Release。
4.3 原因分析
BCM休眠唤醒时,手刹状态CAN信号初始化为Release状态,之后软件未检测到手刹开关变化,不会更新手刹状态值,故唤醒时手刹状态值保持为Release,导致再次点火启动时组合仪表不显示驻车制动灯。
4.4 对策措施
修改BCM软件,软件实时读取手刹开关状态,无论手刹开关状态是否有变化,BCM均会更新手刹CAN信号。修改前,手刹CAN信号更新任务采用触发式处理,修改后手刹CAN信号更新任务采用周期式处理。修改后的BCM软件内容如图4所示,修改后的BCM软件流程图如图5所示。
4.5 任务处理方式对比
任务触发式处理的优点是当开关未变化时,无需进行重复的任务处理,可以减少代码运行时间,提升CPU运行速率。缺点则是在唤醒后需保持休眠前的状态。而任务周期式处理的优点是任务周期扫描,不需要保持休眠前的状态,缺点则是周期执行函数,相同任务会被重复执行,增加CPU运行时间。
5 总结
增加测试用例场景覆盖,以便测试围堵问题外流,对BCM触发式处理会出现问题的输入开关进行排查,总结出3个条件:①对应的开关类型为自锁开关;②对应的输入开关不是唤醒开关;③在唤醒状态后,对应的输入开关功能不需要其他前提条件。根据上述3个条件对BCM所有输入开关进行排查,均更改为周期更新处理方式。对于不同信号发送类型与控制策略的对应分析,在今后的产品研发中可以运用到同类型功能的设计当中,可以更加合理地定义信号发送类型和优化、简化出更加合理的控制策略。
参考文献:
[1] 马建辉,孙常青,郭坤. 汽车BCM的故障诊断设计及实现[J]. 电子产品世界,2017,24(6):43-45.
[2] 汪春华,张玉稳,胡继康. 基于UDS的车身控制器故障诊断系统设计与实现[J]. 汽车电器,2017(8):41-45.
[3] 侯志成. 一种新型智能功率模块(IPM)[J]. 现代电子技术,2011(3):171-175.
[4] 山东省科学院自动化研究所. 一种汽车车身控制模块的故障诊断电路和方法:中国,201610972480.7[P].2016-10-27.