
面向车辆后方紧急制动系统的测试及评价技术研究
2024-11-21 00:00沈亮屹奚瑞轩孔令名李凯
专用汽车 2024年11期


摘要:针对车辆后方紧急制动系统测试与评价方法的缺失,通过分析后向紧急制动实现方案和现有车辆后方先关的法规及测试评价体系,提出了4个较为有代表性的面向车辆后方紧急制动系统的测试场景和一个误触发场景,并给出了评价方法,形成了一套较为完善的面向车辆后方紧急制动系统测试与评价方法。
关键词:车辆后方主动安全;紧急制动系统;测试与评价
中图分类号:U467.5 收稿日期:2024-10-12
DOI:10.19999/j.cnki.1004-0226.2024.11.020
1 前言
随着汽车保有量的不断增长,交通事故数量也在不断增加。据统计,每年有数千万人在交通事故中受伤,造成世界间接损失约2万亿美金[1]。汽车主动安全技术可有效减少事故发生,其中车辆自动紧急制动系统是重要的组成部分。目前车辆前方自动紧急制动系统在实际应用中展现了良好的安全性、可靠性和稳定性。此外,相关的车辆前方自动紧急制动系统的相关标准也较为完善,如欧洲的ECE R152《关于M1和N1型机动车高级紧急制动系统(AEBS)型式认证的统一规定》,我国的推荐性国家标准GB/T 39901—2021《乘用车自动紧急制动系统(AEBS)性能要求及试验方法》,强制性国家标准《轻型汽车自动紧急制动系统技术要求及试验方法》也完成首轮验证,ENCAP和CNCAP等相关测试规程也较为完善。
在车辆前方自动紧急制动系统相关标准及测试评价体系逐步完善的同时,车辆后方的紧急制动系统也同样应被重视。据美国国家公路交通安全管理局(NHTSA)统计初始碰撞点在车辆后部的事故约占22.5%,倒车或在停车位发生的事故约占2.3%[2]。因此,车辆后方的紧急制动系统也逐渐受到行业的关注,越来越多的车辆开始配置面向车辆后方的紧急制动系统。
面向车辆后方紧急制动系统的测试评价方法是车辆后方主动安全的重要组成部分,一个全面完整的面向车辆后方紧急制动系统的测试评价方法可以引导鼓励零部件企业和自研的主机厂更好地开发相关车辆后方的紧急制动系统样车。目前关于车辆后向主动安全法规和测试评价规程以车辆后向报警为主,面向车辆后方紧急制动系统的测试及评价规程在E-NCAP 2023中存在极少量类似测试场景,缺乏系统的车辆后方紧急制动系统的测试场景及测试评价方法,故一个完整、全面、面向车辆后方的紧急制动系统测试场景及测试评价方法亟待研究。
本文通过分析车辆后方紧急制动系统构成、工作原理,以及现行相关车辆后方主动安全测试法规、测试规程,结合现实中高发的事故典型场景设计出面向车辆后方紧急制动系统的测试及评价方法,并进行相关的试验,证明了本文提出测试及评价方法的科学性、有效性和可操作性。
2 车辆后向紧急制动系统实现方案
目前,针对侧方和后方盲区引起的交通事故,车辆通常配备了盲点监测系统(Blind Spot Monitor,BSM),以检测和警示可能与车辆发生碰撞的其他车辆。BSM通过车载传感器(如雷达)获取环境数据,如车速、方向盘转角、车距等,并通过数据处理器对获取的数据进行分析,判断车辆周围是否有其他车辆[3]。如果发现盲区内有其他车辆,BSM会计算出它们与车辆的距离和相对速度,并判断是否可能与车辆发生碰撞。如果判断可能发生碰撞,BSM会计算出碰撞的严重程度,并通过警示灯或蜂鸣器发出警示。国内外研究学者和工程技术人员设计的预警系统主要通过机器视觉技术、毫米波雷达技术和超声波传感器技术实现。其中,机器视觉技术和毫米波雷达技术的应用较为广泛。
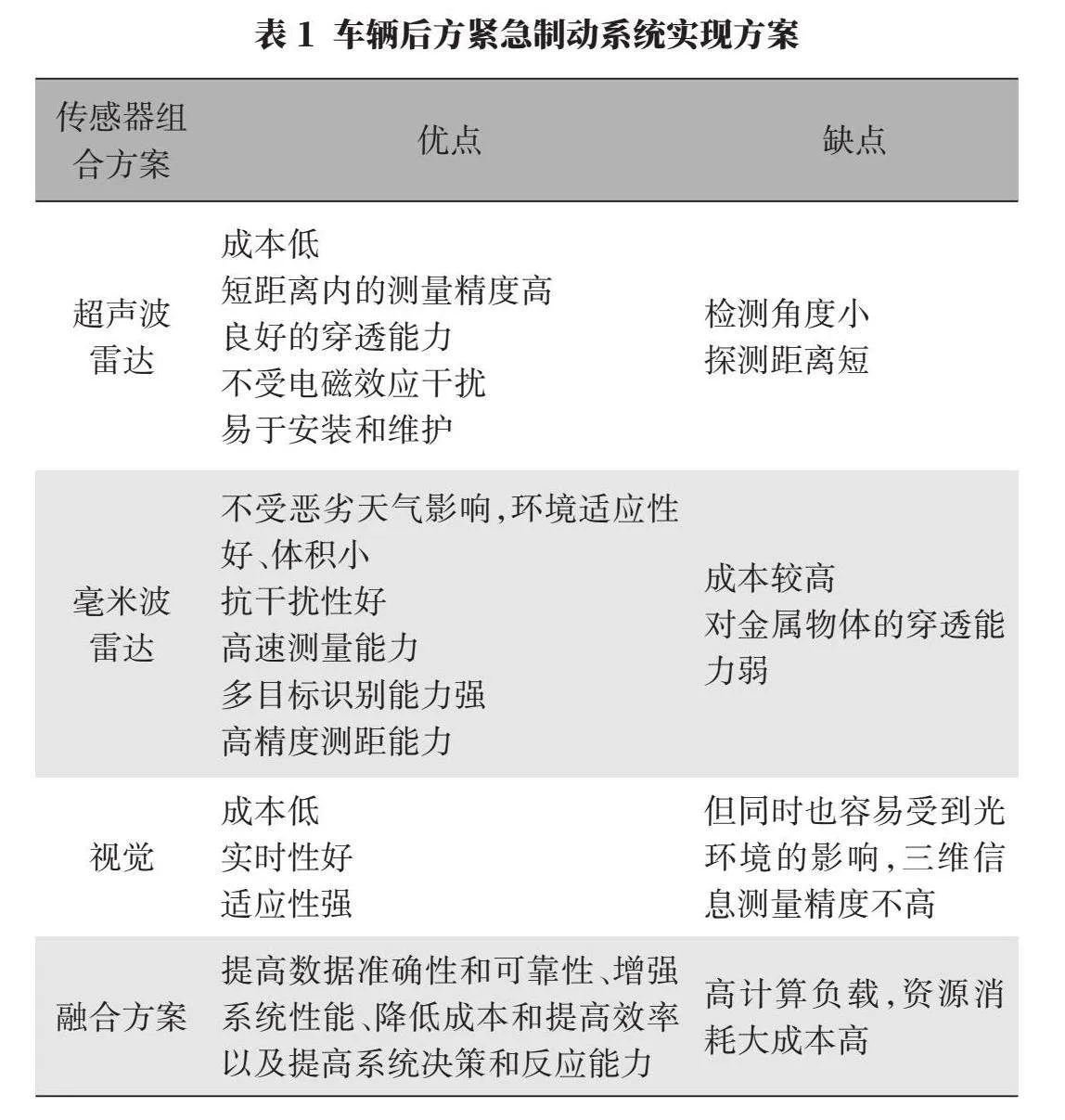
不同的传感器具有不同的优点与缺点,目前主流后向探测系统解决方案如表1所示,激光雷达由于比其他传感器更大,且价格昂贵,这使得在后向探测中难以推广,故不作探讨。目前应用最多的是毫米波雷达,利用后向雷达与角雷达的组合进行后向全方位的检测,但其检测范围很小,检测速度慢,且不能提供环境颜色。此外,纯视觉传感器方案也有所应用,但其对光线强度非常敏感,只适用于光线条件好的场景。基于上述单一传感器的缺点,越来越多融合方案被提及,但目前融合难度大,导致技术水平参差不齐,更需要对其进行试验和评价[4]。
车辆后向紧急制动系统在工作时期间传感器采集物体的位置和运动、目标车辆的运动以及驾驶员动作的信息,并通过控制器对上述信息进行综合评估。如果存在碰撞风险,车辆后向紧急制系统将自动启动制动动作,以避免或至少减轻碰撞。如果司机不进行干预,则车辆后向紧急制动系统继续制动,直到车辆完全停止。
3 现行法规及测试规程分析
3.1 车辆后向报警类法规及测试规程
在车辆发生事故时分心驾驶(包括打电话、发短信、吃东西和其他非驾驶活动)是交通事故的主要诱因,车辆后向报警系统可及时有效的给予驾驶员声学、光学、震动等信号的有效提示,并起到警醒作用。目前相关的法规主要有欧洲的ECE R158(用于倒车和机动车关于驾驶员识别车辆后方弱势道路使用者的设备核准的统一条款)、印度的AIS-145,澳大利亚的Australian Design Rule 108/00、我国推荐性标准《乘用车后部交通穿行提示系统性能要求及试验方法》和C-NCAP2024 RCTA等。
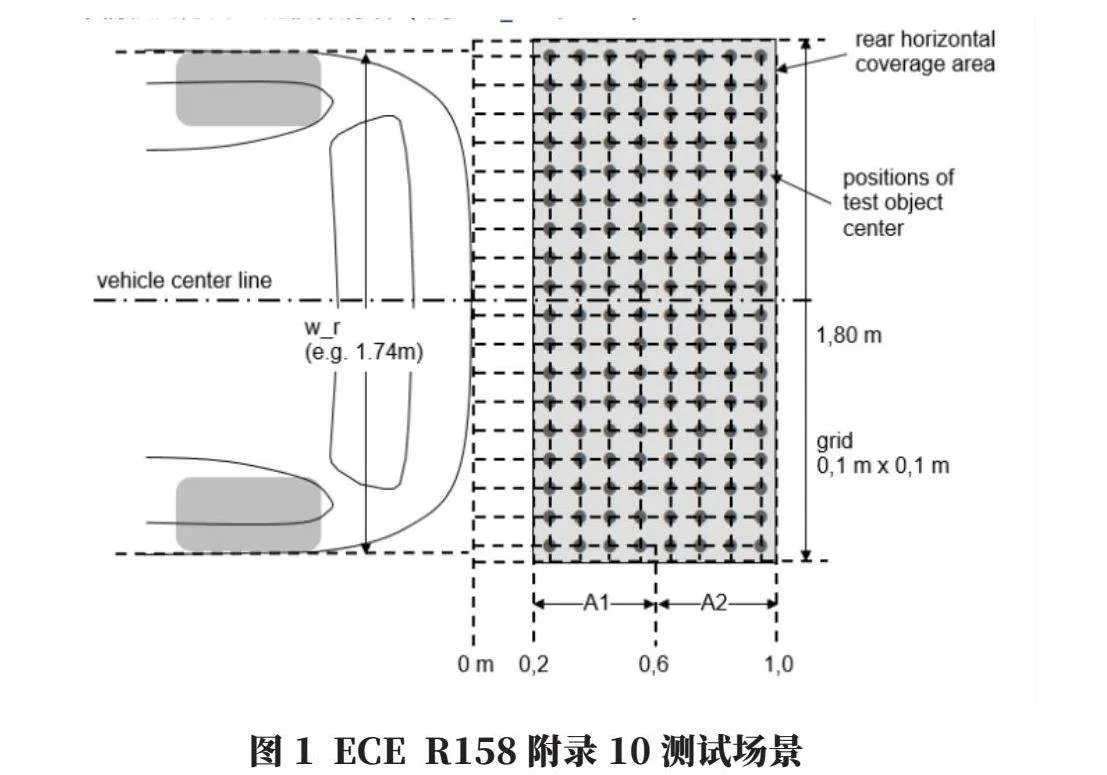
ECE R158作为最早的强制性标准被广泛借鉴,AIS-145,Australian Design Rule 108/00与ECE R158类似。上述主要测试场景如图1所示,主要针对后方静态障碍物全方位、多点位进行测试,观察车辆是否发出报警。
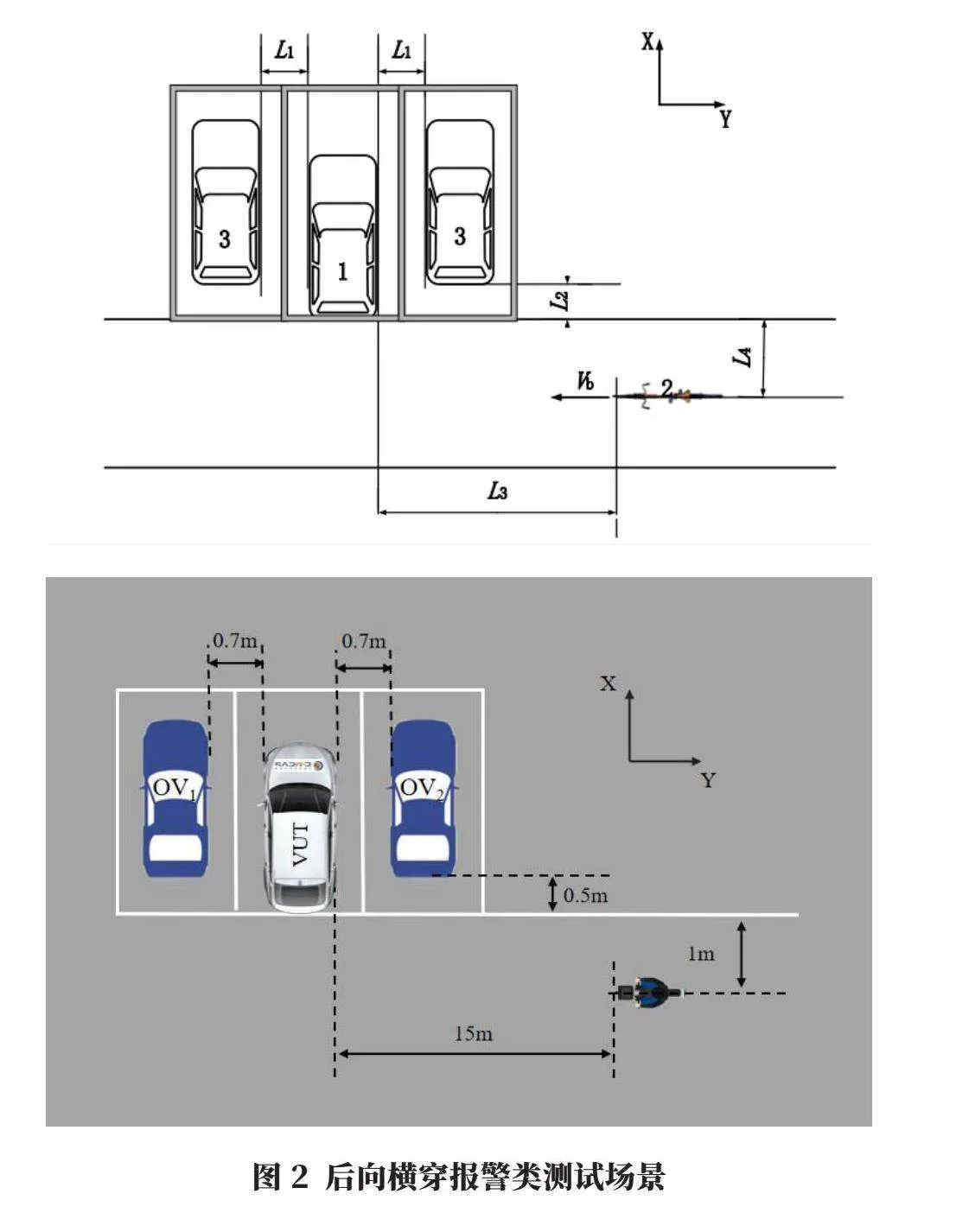
《乘用车后部交通穿行提示系统性能要求及试验方法》和C-NCAP2024后方交通穿行提示系统(RCTA)测试则是针对后方穿行的运动目标物进行测试,测试场景分别如图2所示,C-NCAP2024 RCTA测试引入了更多中国特色目标物,使场景更符合中国国情,测试难度也更大。
3.2 后向制动类法规及测试规程
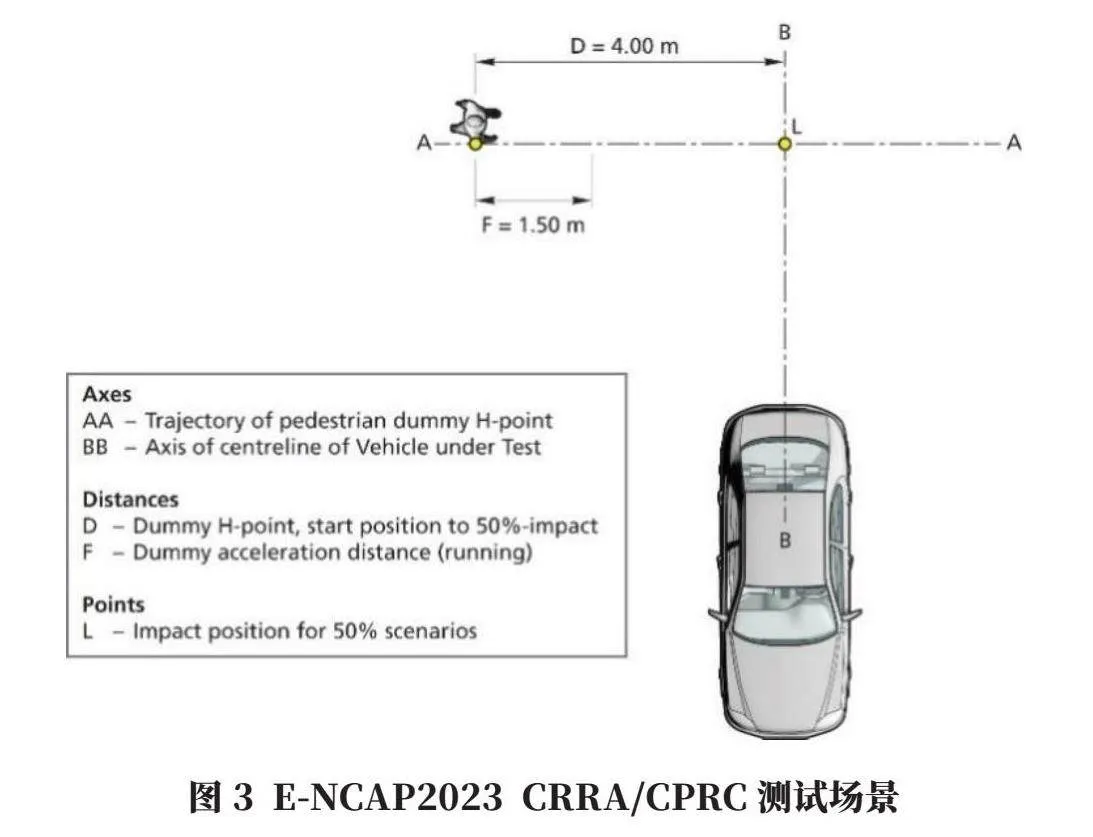
目前后向制动相关法规和测试规程主要有两种,即E-NCAP2023 CRRA/CPRC和C-NCAP2024 RCTB,其中ENCAP从2020版就加入了后向制动相关的场景。目前最新的E-NCAP2023版中CPRA/CPRC场景如图3所示,主要考察车辆在不同速度下对于行人目标的检测和制动。
C-NCAP2024的RCTA场景中,若RCTA无法满足TTC(Time to Collision)≥1.7,可选择在RCTA场景(如图2所示)的基础上进行RCTB试验,倒车速度为10 km/h,考察车辆对于儿童行人、电动自行车和踏板是摩托车的探测和制动。
4 测试场景设计及试验方法
通过上文分析,并根据车辆实现后方紧急制动的相关原理和现有的标准法规和测试评价规程,针对速度低于10 km/h时的车辆后方紧急制动系统提出测试场景及评价方法。行人及其他道路弱势交通参与者(Vulnerable Road Users,VRU)是本文研究的关键,针对其他道路使用者(如车辆)和固定物体(包括基础设施元件,如墙壁、柱子)的碰撞在低速倒车状态下很难发生安全相关事故,故本文不针对此类目标物进行讨论。
4.1 基本要求
车辆后方紧急制动系统运行过程中,无论施加的转向角度如何,其功能都应激活。如果车速超过制造商规定的上限,车辆后方紧急制动功能可将不再激活,但系统最大运行速度不应低于10 km/h。车辆后方紧急制动系统应始终自动激活,驾驶员可以手动关闭车辆后方紧急制动功能,关闭此功能的操作次数至少为两次操作。
车辆后方紧急制动功能应在制动干预之前通过声音或视觉信号警告驾驶员潜在的碰撞,以引起驾驶员的注意。在需要即时制动激活的情况下,可以在制动激活的同时提供报警信号。驾驶员通过视觉、听觉或触觉信号被立即告知每个车辆后方的紧急制动,其中制动加速度可以被识别为触觉信号。
本文通过减速来避免碰撞,不考虑具体的制动方法,且不考虑为避免碰撞而实行的转向干预。
4.2 测试环境和测试目标物要求
测试环境对于车辆后方紧急制系统的测试结果和一致性具有较大的影响,故应针对测试环境做出相应的规定,测试期间的环境条件应满足以下标准:
a.风速不超过5 m/s;b.温度介于-15 ℃和40 ℃之间;c.非降水天气(没有下雨、雨夹雪、下雪等);d.最低光照强度为2 000勒克斯;e.试验方向的能见度不低于500 m;f.试验路面峰值附着系数大于0.9,且干燥、平整、坚实。
对于行人目标和儿童行人目标物,需满足ISO 19206相关标准。对于电动自行车目标物,外观需符合 GB 17761—2018《电动自行车安全技术规范》的要求。障碍车辆应为普通大批量生产的汽车,轴距应满足2.3~2.9 m的范围要求。
4.3 测试场景设计
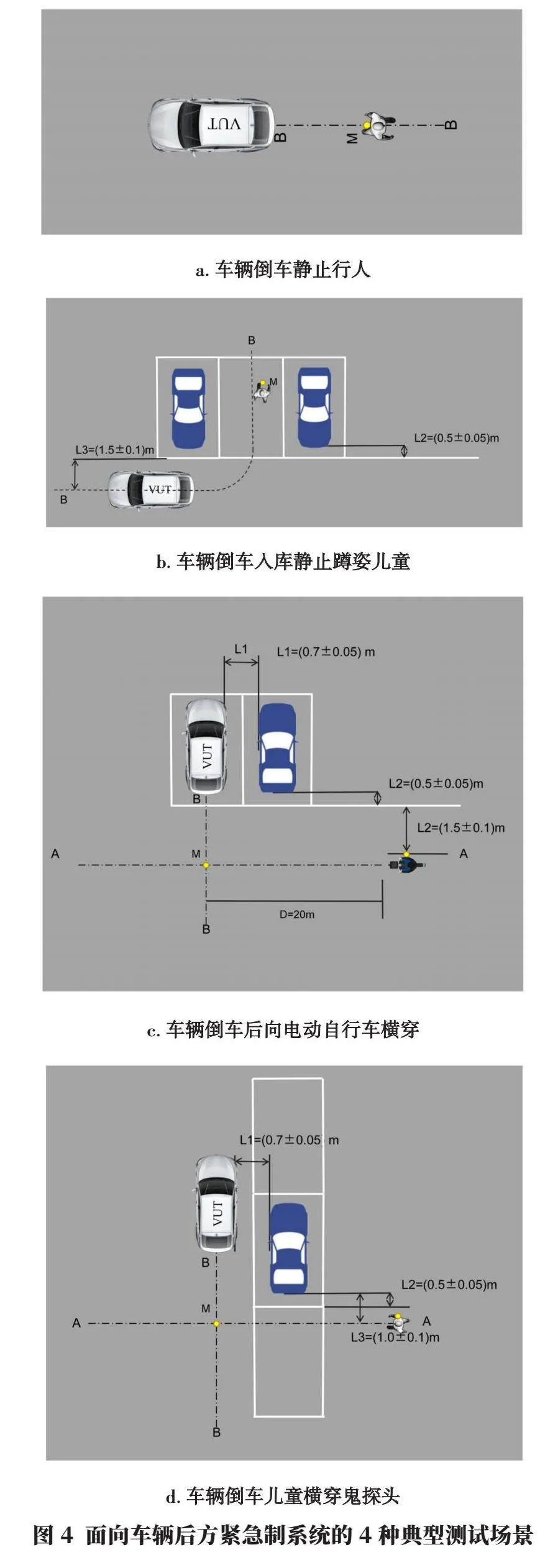
根据上文分析,综合考虑事故发生典型场景、驾驶员驾驶习惯等综合因素,提出了面向车辆后方紧急制系统的4个典型测试场景。该4种场景能够较好地覆盖不同的VRU、车辆运行轨迹、车辆运行速度和驾驶员驾驶习惯等,能够做到少场景、大覆盖的试验测试设计宗旨。此外,本文针对车辆后方紧急制系统设计了一种误作用场景,以测试车辆不会因为过度设计而导致的误作用频发的情况。4个测试场景如图4所示,分别为车辆倒车静止行人场景、车辆倒车入库静止蹲姿儿童场景、车辆倒车后向电动自行车横穿场景和车辆倒车儿童横穿鬼探头,误作用场景如图5所示。
上述场景中测试车辆速度、目标物类型、目标物速度、驾驶员在倒车过程中是否轻踩制动等参数设置如表2所示,通过上述场景和相关参数设置可以进行试验。
对于车辆后方紧急制系统,使用的评价标准主要分为两个方面,即倒车过程中是否与目标物发生碰撞和报警时刻,具体的评价标准如下:
a.是否发生碰撞:若发生碰撞则为不通过,若未发生碰撞则为通过测试。
b.报警时刻:车辆应在不晚于制动干预之前发出声音或视觉信号警告。
如以上两项内容均满足,则视为通过该场景的测试。误作用场景中,车辆不发生报警且不产生制动,则视为通过误作用场景的测试。
6 结语
本文针对车辆后向紧急制动系统实现方案和目前现有的后向相关测试法规进行分析,结合车辆后向倒车紧急制动系统的功能特点和现有法规中的启示,通过测试车辆速度、目标物类物、目标物速度和驾驶员习惯以及测试场景的定义,提出了4种车辆后向紧急制动系统测试场景和一种误作用测试场景,并形成了一套较为完整面向车辆后方的紧急制动系统测试场景及测试评价方法,研究结论对于紧急制动系统的评价和测试具有重要的意义。
参考文献:
[1]World Health Organization.Global status report on road safety 2018[EB/OL].(2018-06-17).https://www.who.int/publications/i/item/9789241565684.
[2]NHTSA.2020 Traffic Safety Facts Annual Repor[EB/OL].https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/813375.
[3]马文博,陈帅,赵士舒,等.乘用车盲区监测系统(BSD)主观评价方法研究[J].中国汽车,2021(11):9-12+48.
[4]王海,徐岩松,蔡英凤,等.基于多传感器融合的智能汽车多目标检测技术综述[J].汽车安全与节能学报,2021,12(4):440-455.
作者简介:
沈亮屹,男,1995年生,工程师,研究方向为汽车主动安全检验等。