
基于STM32的多功能辣椒苗移栽机设计
2024-11-07 00:00陈景铭肖金勇李俊霖田毓扬吴兢龚青山辛新
河南科技 2024年19期







摘 要:【目的】为解决传统移栽机功能性单一,灵活性和可操作性低的问题,提出一种基于STM32的多功能辣椒苗移栽机设计。【方法】首先,为完成多批次幼苗移栽,设计鸭嘴式X横向可调间距移动机构;其次,为实现多地形工作切换,设计基于STM32主控芯片的集成远程多功能操控系统;最后,基于有限元法对移栽机的关键结构进行强度分析。【结果】基于上述方案,成功制造出了实物样机并进行测试。结果表明,该多功能辣椒苗移栽机满足机械强度要求,并且完成一株辣椒幼苗的移栽需要17.64 s。【结论】该多功能辣椒苗移栽机的集成度较高,提高了辣椒苗种植的机械化水平。
关键词:吊篮式移栽结构;多功能移栽机;农业机械;兴农产业
中图分类号:TH6 文献标志码:A 文章编号:1003-5168(2024)19-0020-05
DOI:10.19968/j.cnki.hnkj.1003-5168.2024.19.004
Design of Multi-functional Pepper Seedling Transplanting Machine Based on STM32
CHEN Jingming1 XIAO Jinyong1 LI Junlin1 TIAN Yuyang1 WU Jing1 GONG Qingshan1 XIN xin2
(1.Hubei University of Automotive Technology, Shiyan 442002,China;2.Dongfeng Huashen Automobile Co., Ltd., Shiyan 442002,China)
Abstract: [Purposes] In order to solve the problems of single functionality, low flexibility and operability of traditional transplanting machine, a design of multi-functional pepper seedling transplanting machine based on STM32 is proposed. [Methods] Firstly, the duckbill X transverse adjustable spacing mobile mechanism is designed to complete multiple batches of seedling transplanting operations; secondly, in order to realize the switching of multi-terrain work, an integrated remote multi-functional control system based on STM32 main control chip is designed; finally, the finite element method is used to analyze the strength of key parts of the multifunctional pepper seedling. [Findings] Based on the above scheme, a physical prototype was successfully manufactured and tested. The results show that the multifunctional transplanting machine meets the mechanical strength requirements, and it takes only 17.64s to transplant a pepper seedling. [Conclusions] This multi-functional pepper seedling transplanting machine has a high degree of integration, and improves the mechanical automation level of pepper seedling planting.
Keywords:basket style transplanting structure; multi functional transplanting machine; agricultural machinery; developing agricalture industry
0 引言
随着科技的高速发展,农业机械设备也正在向自动化、智能化的方向发展。幼苗移栽是辣椒作物生产的关键环节之一,设计一种能够对辣椒幼苗进行移栽作业的装置,无论是对生产成本的控制,还是对作物质量的提升,以及是对农业机械设备的发展,都具有十分重要的意义[1-3]。目前,农业移栽装置的设计逐渐成为学者们研究的热点。韩阿丽等[4]设计了吊篮式结构移栽装置,满足一次性烟草幼苗移栽过程;吕志军等[5]提出并设计了一种电动履带自走式烟苗移栽机,在满足远程操控的同时符合烟苗的农艺要求;刘克福等[6]提出了一种基于曲柄摇杆机构与凸轮耦合的麦冬移栽机,通过机构的夹取动作实现了麦冬移栽的自动化取苗;赵匀等[7]设计了一种探入式非圆齿轮行星系移栽机构,通过虚拟样机进行仿真得到的理论轨迹,对比物理样机经过高速摄影试验得到的实际轨迹,最终验证了机构设计的正确性,提高了番茄苗的取苗成功率和移栽质量。综上所述,大部分学者对农作物移栽装置的研究还主要集中在移动方式的便利性和装置执行机构的优化上,而对于移栽装置的控制和移栽作物的实时监控方面的研究较少。
因此,为了解决目前移栽装置功能单一、无法远程进行操控、作业状况难以实时监控等问题,本研究设计了一种可实时监控辣椒苗作业状况的移栽装置,基于STM32主控芯片开发了语音控制、温湿度测量等远程操控软件,基于有限元模块分析了装置关键零件的应力,并通过田间性能测试,为移栽装置的实用性提供了依据。
1 装置方案设计及工作原理
多功能辣椒苗移栽装置结构如图1所示。移栽装置整体采用对称结构设计,其机械结构主要分为六个部件,分别为焊接机架、四工位移栽机构、行距调节机构、覆土机构、张紧机构、浇水机构。在移栽幼苗的过程中,首先,将幼苗放入投苗机构,通过电机驱动,使投苗拨盘旋转一周,将幼苗送入鸭嘴式移栽器;其次,通过调整丝杠来改变投苗拨盘的间距,同时调节下方的移栽机构间距,以适应不同间距的栽苗需求;再次,凸轮旋转使鸭嘴入土器进入土壤,末端打开,实现幼苗入土;最后,覆土机构和浇水机构依次工作,完成覆土和浇水,从而完成辣椒苗的移栽。
2 移栽装置关键结构设计
2.1 四工位移栽机构
四工位移栽机构为多功能移栽机的关键部位[8],其三维模型示意如图2所示,其由鸭嘴口入土器、接苗口、偏心盘、推杆机构、连杆等构成。
移栽机构中的鸭嘴式入土器通过推杆机构和扭簧来实现开合动作。推杆机构设计为X、Y轴对称,确保动作的均衡性。整个运动过程分为两个阶段:挤压和收缩。在挤压阶段,推杆机构会推动鸭嘴打开,而收缩阶段则会使鸭嘴闭合。这两个阶段的运动是等速且柔性的,避免了速度突变点,保证了移栽过程的平稳性。
推杆机构工作流程为电机驱动移栽机轴运转,进而带动偏心盘转动。当偏心盘旋转至特定角度时,凸轮顶开鸭嘴,鸭嘴随之插入土中。在鸭嘴打开的瞬间,幼苗或种子被种入土壤。移栽完成后,由于扭簧的作用,鸭嘴会在一段时间后自动闭合[9],完成整个移栽过程。推杆机构简图如图3所示。
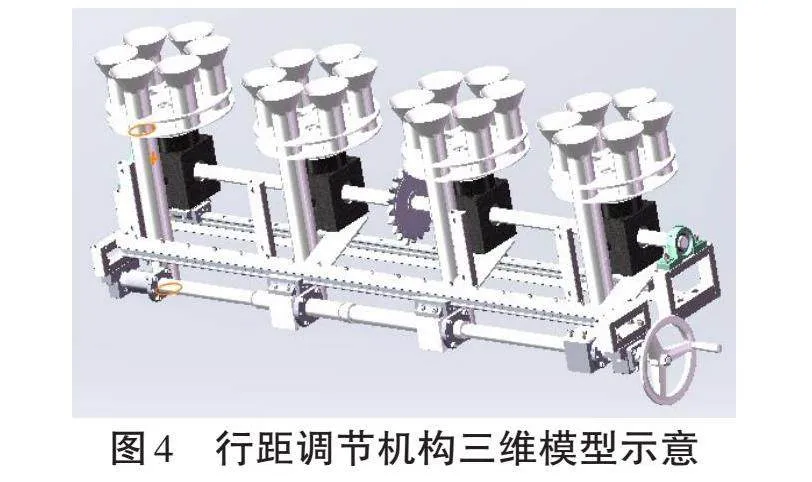
2.2 行距调节机构
为了适应不同间距的辣椒幼苗移栽,设计了一种行距调节机构,与四工位移栽机构协同工作。该机构包括导轨、丝杠、投苗口、投苗盘和滑块等部件,该机构的三维模型如图4所示。通过丝杠和滑块的配合,可以调整各投苗机构之间的距离,确保投苗口与接苗口在同一平面上,以适应不同作物的种植需求。
在投苗盘转动周期固定的情况下,确定了六个投苗口为最优配置,相应地,四工位移栽机构的鸭嘴数量也设置为六个一组[10]。考虑到移栽环境的潮湿性,投苗口采用热塑性聚乳酸(PLA)材质设计,以提高耐用性。
根据模型图纸,对移栽机的各个零部件进行精确加工。其中的特殊部件,例如四工位移栽机构和行距调节机构会被特别定制,以满足特定的功能需求。当所有零部件加工完成并检验合格后,便开始样机的装配工作。在装配过程中,需要确保每个部件的安装精度和整体结构的稳定性。最终,经过装配后的多功能移栽实物样机如图5所示。经过一系列的测试和优化后,样机的性能得到了验证和确认,满足设计要求。
3 关键零件有限元分析
移栽机构的核心部件包括入土器、棘轮和推杆机构。由于入土器经常与泥土直接接触,而推杆机构和棘轮则因鸭嘴入土器的频繁开合动作容易受到磨损。为了确保这些关键部件的强度和可靠性,需要采用有限元分析方法对其进行详细评估。这三个主要部件的材料均使用PLA材料,材料的属性见表1。
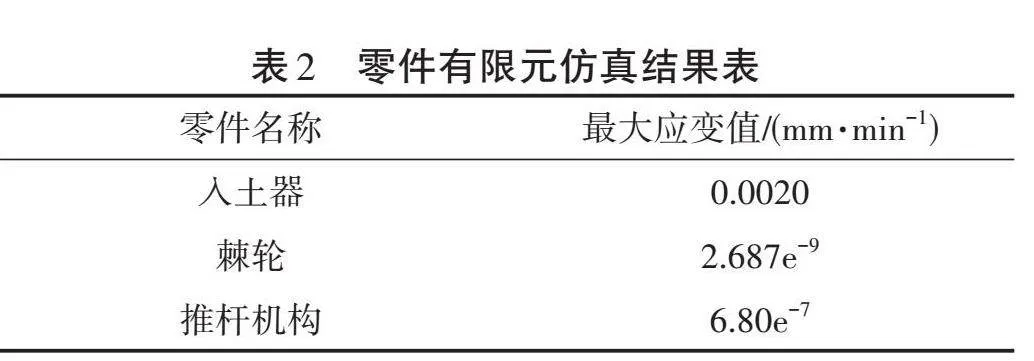
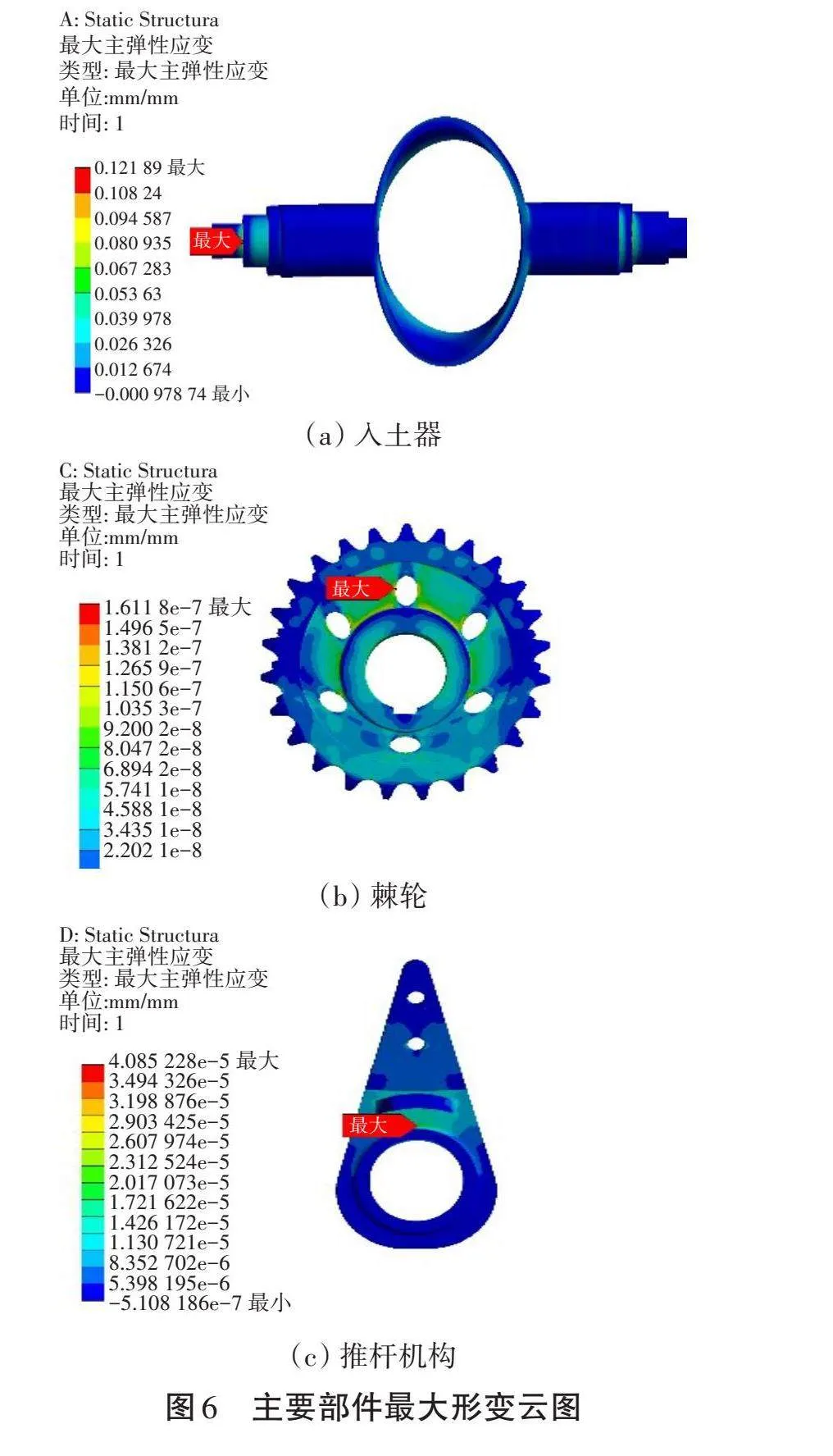
通过建立有限元模型及仿真,根据实物加载情况,输入500 N的力和力矩的载荷条件,求解得到入土器、棘轮、推杆机构三个关键零件的变形仿真结果如图6所示。有限元仿真结果见表2。
对有限元结果进行分析,三个关键零件最大应变远小于PLA材料屈服点应变值0.04 mm/min[11],则该零件的强度可靠。
4 控制系统设计
4.1 控制功能集成方案
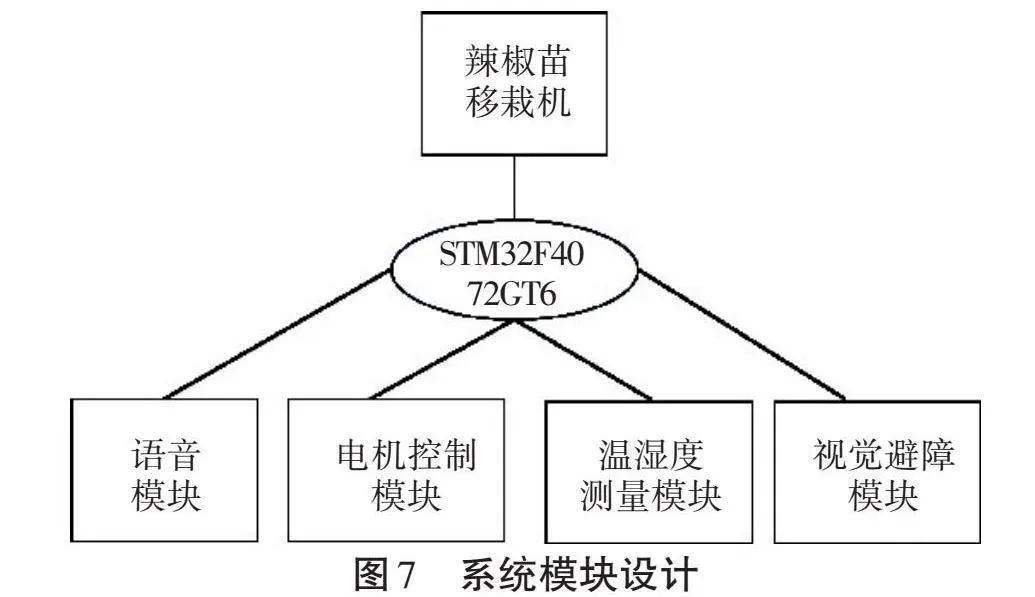
在设计辣椒苗移栽机的控制系统时,选择合适的单片机对确保系统性能和稳定性非常关键。考虑到系统的功能需求和复杂性,选择STM32F407ZGT6作为主控芯片[12]。控制系统的设计采用模块化方法,每个模块负责特定的功能,通过这些模块的协同工作,实现移栽机的多功能性[13-14]。具体的模块功能设计如图7所示。
4.2 语音控制模块设计
在辣椒苗移栽机的设计中,采用蓝牙模块进行通信,通过串口向STM32单片机发送指令,实现设备的控制。此外,该设计还集成了天问BlockLU-ASR01模块,支持语音识别,允许用户通过语音命令来操作设备。LU-ASR01模块与天问Block图形化编程软件配合使用,使得编程变得简单直观,支持自定义语音命令,可以控制多种电子设备。这种结合蓝牙和语音识别的通信方式,提升了系统的交互性和用户友好度。
4.3 温湿度测量模块设计
DHT11是一款成本低廉、接口简单、协议易于实现的温湿度测量模块,其内置了单片机来完成温度和湿度的测量与校准,主要通过测量周围环境的湿度和温度来工作。考虑到本研究设计的辣椒苗移栽机对温湿度监测的需求,故选择了DHT11作为测量工具,测量的具体流程如图8所示。通信过程中,DHT11会先发送一个低电平信号,主机收到信号后拉高数据线,等待DHT11响应。
4.4 电机控制模块设计
对于该移栽机的电机控制模块,选择了BTN7971作为控制电机的驱动芯片。该芯片专为高效驱动电机而设计,有助于减少能量损耗,提升系统效率。同时,其还具备过流、过热和短路等保护功能,增强了系统的安全性和可靠性。
在本研究设计的辣椒苗移栽机中,三个电机都连接到BTN7971驱动器上,由STM32的两个GPIO端口控制。其中一个GPIO端口输出50 Hz的PWM信号,通过调整占空比来控制电机的速度;另一个GPIO端口则通过上拉或下拉控制电机的转向。在电机控制系统中,利用AI模型匹配算法和神经网络训练,实现了对障碍物的动态或手动识别。这种方法可以调整识别逻辑,从而检测并避开坚硬物体,保护辣椒苗免受损伤。
5 实物测试
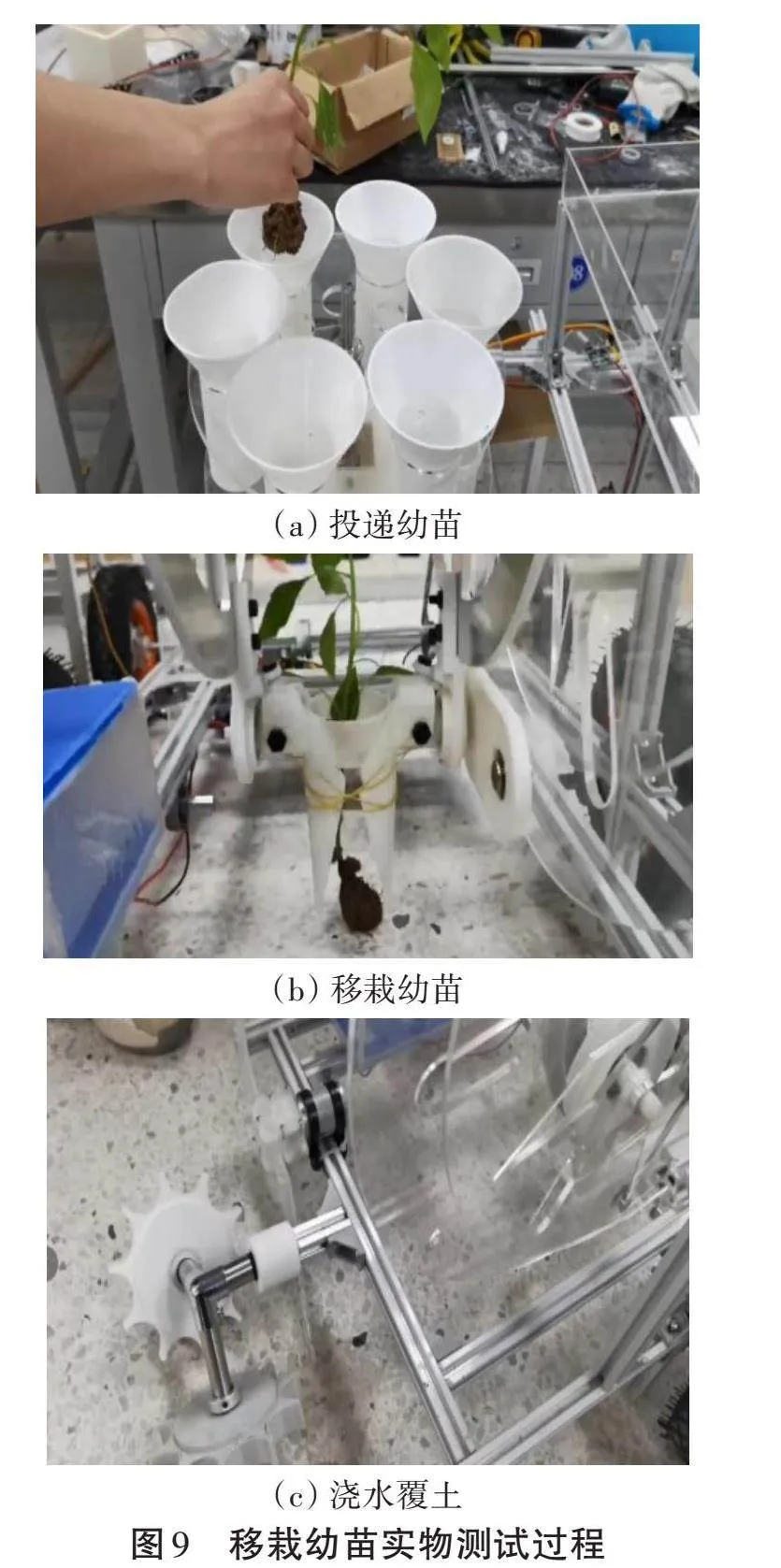
在对多功能辣椒移栽机进行实物测试时,将辣椒幼苗放入装置的投苗口,通过远程语音命令发出移栽指令。电机随即启动,带动投苗拨盘将幼苗送入鸭嘴式入土器。当幼苗触碰到入土器内的限位开关,移栽机构的偏心盘和凸轮开始运转,精确地将入土器移动到目标位置。入土器进入泥土后,前端开口自动打开,将幼苗投递到土中。随后,装置前进,鸭嘴式入土器上升,覆土和浇水机构进行覆土和浇水操作,完成整个移栽过程。为确保测试结果的准确性,整个实验重复了8次,并取平均值。移栽幼苗实物测试过程如图9所示。
通过分析,设计出的整体移栽装置的实物尺寸为1.2 m×0.8 m×1 m。对实物进行移栽幼苗测试,实验结果见表3。由表3可知,完成1颗株辣椒幼苗的移栽流程平均需要时间17.64 s。在运行过程中没有出现异常,总体达到预期效果,满足移栽幼苗作业要求。
6 结语
本研究成功开发了一种新型多功能辣椒苗移栽机,有效克服了传统移栽机在功能和效率上的局限性。该装置通过凸轮挤压和扭簧收缩机制精确控制鸭嘴开合,辅以温湿度监测,确保了移栽位置的适宜性。其可调节的投苗口和接苗口间距,提升了空间利用率和作业灵活性,显著提高了农业作业效率,具有重要的理论和实际应用价值。
尽管该设计取得了一些成果,但在极端环境中的适应性和组件耐久性方面仍有改进空间。未来,可以聚焦于优化设计参数以提高环境适应性,开发新型材料以增强耐久性,并进行大规模应用测试以验证设计的普适性和可靠性。这些改进将进一步推动农业自动化技术的发展。
参考文献:
[1] 左胜甲,丁旭旭,孔德刚,等.全自动人参移栽机设计与试验[J/OL].农机化研究,1-6[2024-08-18].https://doi.org/10.13427/j.cnki.njyi.20240626.001.
[2] 王恒进,李玉清,陈继国.基于UG的链夹式移栽机用自动分供苗机构设计[J].机械,2016,43(10):27-30.
[3] 刘蒙滋,姜凯,王秀,等.蔬菜自动移栽机研究现状与展望[J].农机化研究,2024,46(10):1-8,20.
[4] 韩阿丽,燕亚民.吊篮式山地移栽机的设计[J].南方农机,2024,55(5):19-22.
[5] 吕志军,黄会男,吴疆,等.电动履带自走式烟苗移栽机关键部件设计与田间试验[J].农业开发与装备,2023(12):127-130.
[6] 刘克福,林子涵,蔡龙基.麦冬密植移栽机设计与研究[J].农业技术与装备,2024(2):1-4,7.
[7] 赵匀,张卫星,辛亮,等.探入式番茄钵苗移栽机构设计与试验[J].农业机械学报,2019,50(1):105-112.
[8] 李心志,廖庆喜,袁华,等.油菜基质块移栽机苗床带整备装置设计与试验[J].华中农业大学学报,2024,43(2):215-226.
[9] 武东东,胡建平,汪宽鸿,等.全自动蔬菜移栽机发展现状与趋势[J].长江蔬菜,2023(24):1-3.
[10] 侯加林,张二鹏,张康博,等.基于DEM-MFBD的辣椒移栽机取投苗装置设计与试验[J].农业机械学报,2023,54(12):46-57,87.
[11] 雷经发,魏展,刘涛,等.熔融沉积PLA材料动态力学行为及本构模型研究[J].中国塑料,2020,34(11):59-65.
[12]徐志波,喻丽华,罗震,等.辣椒移栽机栽植机构的参数设计与仿真研究[J].机电工程,2020,37(9):1057-1062.
[13] 武重,卢阳.考虑部件振动特性的电炉异步电机电气控制方法[J].工业加热,2024,53(4):30-34.
[14] 宋忠东,刘翠莲.基于机器视觉的智能制造实践平台应用研究[J].科技创新与应用,2024,14(13):22-25.
