
基于改进滑模观测器的PMSM无速传感控制设计
2024-11-03 00:00:00柴成龙李娟李生权陈兴
南京信息工程大学学报 2024年5期



摘要 针对滑模观测器(SMO)因高频抖振导致电机转子速度和位置难以准确估计,且速度环PI控制器鲁棒性和速度跟踪性能较差的问题,提出一种基于改进滑模观测器的永磁同步电机(PMSM)无速传感控制设计.首先,在直接转矩控制系统中的滑模观测器后加入无限脉冲响应滤波器(IIR filter),以解决在滑模观测器输出中的高频噪声,并进一步采用连续的双曲正切函数代替不连续的符号函数,以改善系统抖振;其次,基于自抗扰控制器(ADRC)设计速度环,用以改善系统超调和转速之间的矛盾;最后,在Matlab/Simulink环境下搭建了硬件在环实验平台.仿真和结果表明,在相同负载和干扰条件下,相比传统无速度传感系统,本文所设计的自抗扰永磁同步电机无速传感控制能减小转速估计的抖振,且具有更优的鲁棒性和速度跟踪性能. 关键词 永磁同步电机;滑模观测器;无限脉冲响应滤波器;自抗扰控制器
中图分类号 TM341;TP273.3
文献标志码 A
收稿日期 2023-12-14
资助项目 国家自然科学基金 (61903322);新能源电力系统国家重点实验室项目(LAPS190 03);江苏省“六大人才高峰”项目 (KTHY201 8038)
作者简介 柴成龙,男,硕士生,主要从事机电一体化方向的研究.MZ120221188@stu.yzu.edu.cn
李娟(通信作者),女,博士,副教授,主要从事复杂机电系统建模与先进控制设计与实现研究.juanli@yzu.edu.cn
1 扬州大学 电气与能源动力工程学院,扬州,225127
0 引言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)以其体积小、转矩密度大、效率高、性能优良等优点被广泛应用于风机、泵机和电动汽车等工业领域[1-2].永磁同步电机的调速控制系统需实时获取转子位置和转速信息,通常在电机上安装位置传感器.但机械传感器的安装将导致电机制作难度的提升、体积增大以及成本的上升.此外,传感器运行时受温度和电磁干扰等环境条件限制,易失真造成系统稳定性下降[3].
为解决机械传感器的使用所引起的问题,无速传感的直接转矩控制(Direct Torque Control,DTC)已成为电气传动中一个热门的研究方向.永磁同步电机系统无速度传感器控制策略根据其调速范围,主要分为基于模型法的中高速控制算法和基于转子凸极性的零低速控制算法.模型法包括反电动势法[4]、磁链计算法、滑模观测法、模型参考自适应法[5]、扩展卡尔曼滤波[6]和其他状态观测器法,主要通过计算或者观测具有电机位置信息的反电动势或磁链,进而将电机转子位置信息和转速提取出来,当电机转速过低时,反电动势值很小,由于逆变器非线性等诸多非理想因素会造成反电动势或磁链的信噪比过低,基波模型法逐渐失效,一般只能在额定转速10%以上才能得到较好的控制效果[7].零低速控制算法包括V/F法、I/F法、低频注入法和高频注入法[8]等,主要通过给电机注入高频信号,从响应信号中获取转子位置信息,从而达到在零低速下控制电机的目的.
滑模观测器(Sliding Mode Observer,SMO)具有鲁棒性好、抗干扰能力强、算法结构简单等优点,在永磁同步电机无速传感器驱动系统中得到了广泛应用[9].SMO利用开关控制将系统稳定地工作于滑模面上,使定子估算电流准确地追踪到实际电流并进一步观察到电机反电动势,从而获取转速和转子位置信息.抖振是滑模观测器影响估算精确度的主要问题,故改进滑模观测器主要是减少抖振的影响.传统的永磁同步电机直接转矩控制的无速传感系统一般采用滑模观测器法估算pGSMetkUvmPmvWdlhtjL3wAD0to1ah1vYxb99IUa5/4=转子磁链的位置角来实现.但是,以反电势为基础的无速度传感器技术要求采集受测量噪声污染系统的电压、电流,采集所产生的噪声污染必然会对整个速度控制性能产生影响.为了减小速度控制器测量噪声的影响,通常会引入带滤波器的有效方法,因此,在许多实际的无速传感控制系统中,对SMO输出后的估计速度信号进行滤波处理.文献[10]采用磁链估算法对永磁同步电机转子位置和速度进行估算,解决了转矩脉动引起的转速波动的问题,该方法加入了一阶惯性滤波器,虽进行了补偿,仍存在一定程度的相位滞后,且灵敏度低.文献[11]提出一种自适应有限脉冲响应滤波器(Finite Impulse Response Filter,FIR filter),通过衰减传统SMO方法的抖振问题来提高反馈观测器方法的速度控制性能,但也会产生时延问题.文献[12]使用的无限脉冲响应滤波器(Infinite Impulse Response Filter,IIR filter)是另一种替代滤波器,它可以衰减高频噪声以满足信号采集的要求.由于无限脉冲响应滤波器具有高效、快速的特点而被广泛用于实际工程系统中.将无限脉冲响应滤波器引入无速传感直接转矩控制系统是一个相对新颖的研究领域.
本文采用表贴式永磁同步电机作为系统控制对象,通过分析滑模观测器(SMO)抖振问题,并且探究其原因进行研究,提出一种改进的滑模观测器.首先,采用双曲正切函数代替传统的符号函数;其次,在滑模观测器后加入无限脉冲响应滤波器(IIR filter);最后,设计了自抗扰控制器(Active Disturbance Rejection Controller,ADRC)提高永磁同步电机的调速控制性能,并简化参数整定、降低复杂调参,以此来提升转速的跟踪性能,增强系统的鲁棒性.1 问题提出
1.1 永磁同步电机的调速模型
本文以表贴式永磁同步电机为例,建立两相静止坐标系下的电流及反电动势方程分别为
ddti i=-RL0 0-RLi i+1Lu u-1Le e,(1)
e e=ωψ-sin θ cos θ.(2)
式中:u,u,i,i分别为定子端电压和端电流;L,R分别为电机上定子电感和电阻;θ,ω表示转子电角度和电角速度;e,e表示扩展反电动势;ψ表示永磁体磁链.
PMSM系统的运动方程为
T=T+Bω+Jdωdt.(3)
式中:T,T分别为电磁转矩和负载转矩;J,B,ω分别为转动惯量、阻尼系数和转子机械角速度.
1.2 基于DTC的PMSM调速设计
由式(2)可知,通过反电动势可以求出转子位置和转速信息,故设计滑模观测器来实时观测反电动势,数学模型如下:
ddt =-RL0 0-RL +1Lu u-1Lv v.(4)
式中:,为电流估计值.
将式(4)与式(1)做差可得:
ddt =-RL0 0-RL +1Le-v e-v.(5)
式中:=-i,=-i为电流估计误差;v,v为滑模控制律.因此可定义滑模面函数S和滑模控制律:
ST==0,(6)
v v=h·sign(-i)
h·sign(-i).(7)
其中:h为满足Lyapunov稳定性的滑模增益,是大于零的常数;sign S是开关函数.当ST<0时,SMO进入滑动模态,当到达滑模面时,=·=0,有v趋近于e.根据滑模等效原理有:
h·sign(-i) h·sign(-i)=v v=e e.(8)
定义Lyapunov函数为:V=12S2≥0,仅当S=0时等式成立,其中VT=VV.由Lyapunov稳定性原理可知,当V是正定,且是负定时,那么S最终会收敛到0,计算<0,即ddt<0,按式(5)和(7)展开得:
ddt=-RL+1Le-1Lh·sign()<0.(9)
≠0时,对满足不等式(9)进行讨论:
{h>-R||+e, >0; h>-R||-e,<0.(10)
由式(10)可得h>-R||+e·sign().对V同理得式:h>-R||+e·sign() ,故h满足式(11)时,系统满足Lyapunov稳定性:
h>max-R||+e·sign(), -R||+e·sign() .(11)
系统将在有限时间内收敛到滑模面.最终可以通过滑模观测器估计出反电动势.
由于符号函数的开关特性产生的高频谐振及噪声需要滤除,故需要加入低通滤波器进行滤波.滤波后的反电动势估算值,分别为
{=ωs+ωe,
=ωs+ωe.(12)
式中:ω表示滤波器的截至频率.因低通滤波器有相位延迟特性,故需进行相位补偿Δθ:
Δθ=arctan(ωω).(13)
使用反正切函数法计算转子位置信息,需要加入转子位置补偿环节以解决低通滤波器带来的相位延迟问题,传统设计法得到的滑模观测器输出的转子角度θ
和速度估计ω分别为
{θ=arctan(-)+Δθ,
ω=dθdt.(14)
2 基于DTC的PMSM无速传感调速设计
2.1 滑模观测器的改进
滑模观测器的改进结构框图如图1所示.其中,因为开关函数的开关特性是造成估测反电动势产生抖振的主要原因,会进一步影响对转子转速和位置计算的准确性.为使滑模观测器有较好的观测准确性,采用双曲正切函数代替开关函数:
tanh(x)=ex-e-xex+e-x.(15)
双曲正切函数因其在零点处连续且下界值无限趋近于-1,上界值无限趋近于1的特性,可以避免因符号函数不连续性导致的抖振问题.
传统反正切法估算的反电动势,需要加入转子位置补偿环节以解决低通滤波器带来的相位延迟问题,将增加系统复杂性且补偿精度不高,还需要用查表法,会引来噪声干扰.
本文采用锁相环对滑模观测器估算的反电动势进行推导,求得转速和转子角度.通过锁相环的控制方法精确度更高,动态性能更好.结合反电动势计算公式可得:
Δe=ksin θ·cos -kcos θ·sin = ksin .(16)
式中:θ,,分别表示转子实际位置、估计位置和估计位置误差;k=ψω.当|θ-|<π6时,sin ≈.
2.2 无限脉冲响应滤波器的设计
当使用传统的滑模观测器来估计转子的磁链位置角和转速时,估计结果会出现抖振.为了获得更精确的转子速度信号,引入无限脉冲响应滤波器来衰减SMO输出中混合的高次谐波信号[13].滤波后的转子转速信号如下:
ddt=1τ(-).(17)
式中:是通过滤波器的输出;τ是时间常数,
τ=12πf
;f是截止频率.无限脉冲响应滤波器的传递函数可由式(18)获得:
=1τs+1.(18)
对式(18)使用后向差分法进行离散化可得:
(n)=k(n)+k(n-1).(19)
其中:k=ττ+T,k=Tτ+T,T表示采样周期.
引入无限脉冲响应滤波器,能进一步改善速度的不稳定性.因为无速传感控制是对实际速度的估计,因此进一步对转速控制器做改进,以改善无速传感系统的控制效果.
2.3 自抗扰速度控制器的设计
自抗扰控制方法[14]是一种主动抗干扰策略,可以较好地应对非线性、时变和不确定性系统.该方法通过扰动观测和主动补偿,消除或减小系统受到的外部扰动的影响,从而实现更为精确和稳定的控制[15].
速度的微分形式为
dωdt=TJ-TJ-BωJ.(20)
令x=ω,x=σ(t),σ(t)=-1J(T+Bω),b=1J≈b,u=T,则可以得出
{=x+bu,
=(t).(21)
基于式(20)设计的线性扩张状态观测器:
{=z-β(z-y)+bu(t),
=-β(z-y).(22)
式中:,分别为对x,x总扰动的估计值.针对ADRC参数整定困难问题,文献[16]提出线性自抗扰控制,将ADRC参数与控制器和观测器的频率联系起来,把参数整定问题转化为带宽调节问题.根据带宽法配置极点可得β=2ω,β=ω2,其中,ω是观测器带宽.设计控制律如下:
u=u-zb=k(ω*-z)-zb.(23)
式中:k表示控制器增益.
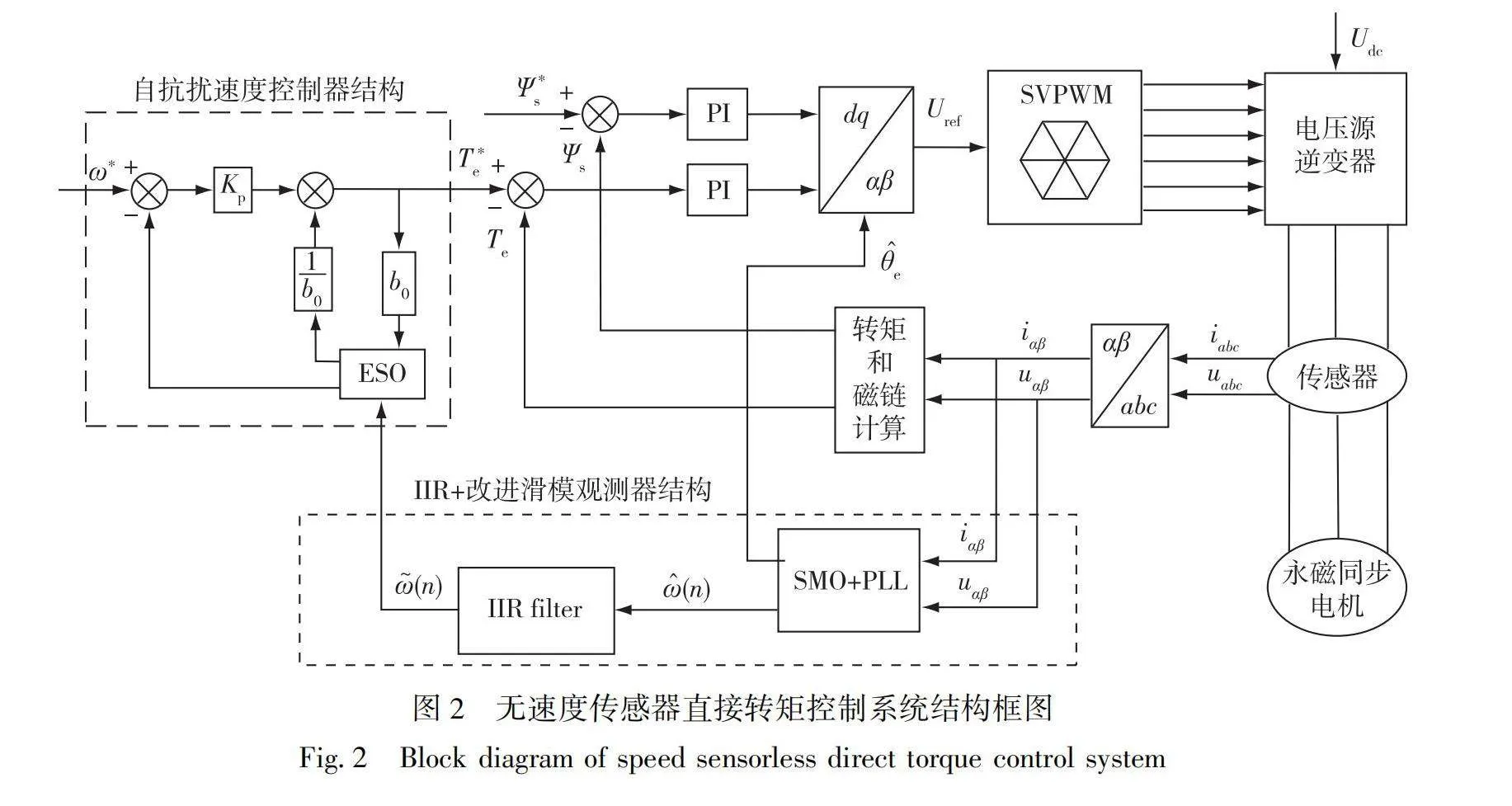
自抗扰速度控制器结构如图2所示.
3 实验验证与结果分析
结合实验室已有试验平台的电机参数,在MATLAB/Simulink中进行仿真和实验分析其中电机的参数如表1所示.
本文主要验证系统的速度跟踪性能以及改善抖振能力,仿真条件设置如下:仿真时间为0.8 s;给定转速为1 000 r·min-1;采样周期T=10 μs;磁链参考值|ψ|*=0.014 5 Wb;在0 s时电机带载启动,设置初始负载为0.3 N·m,在0.5 s时增加负载到0.4 N·m.
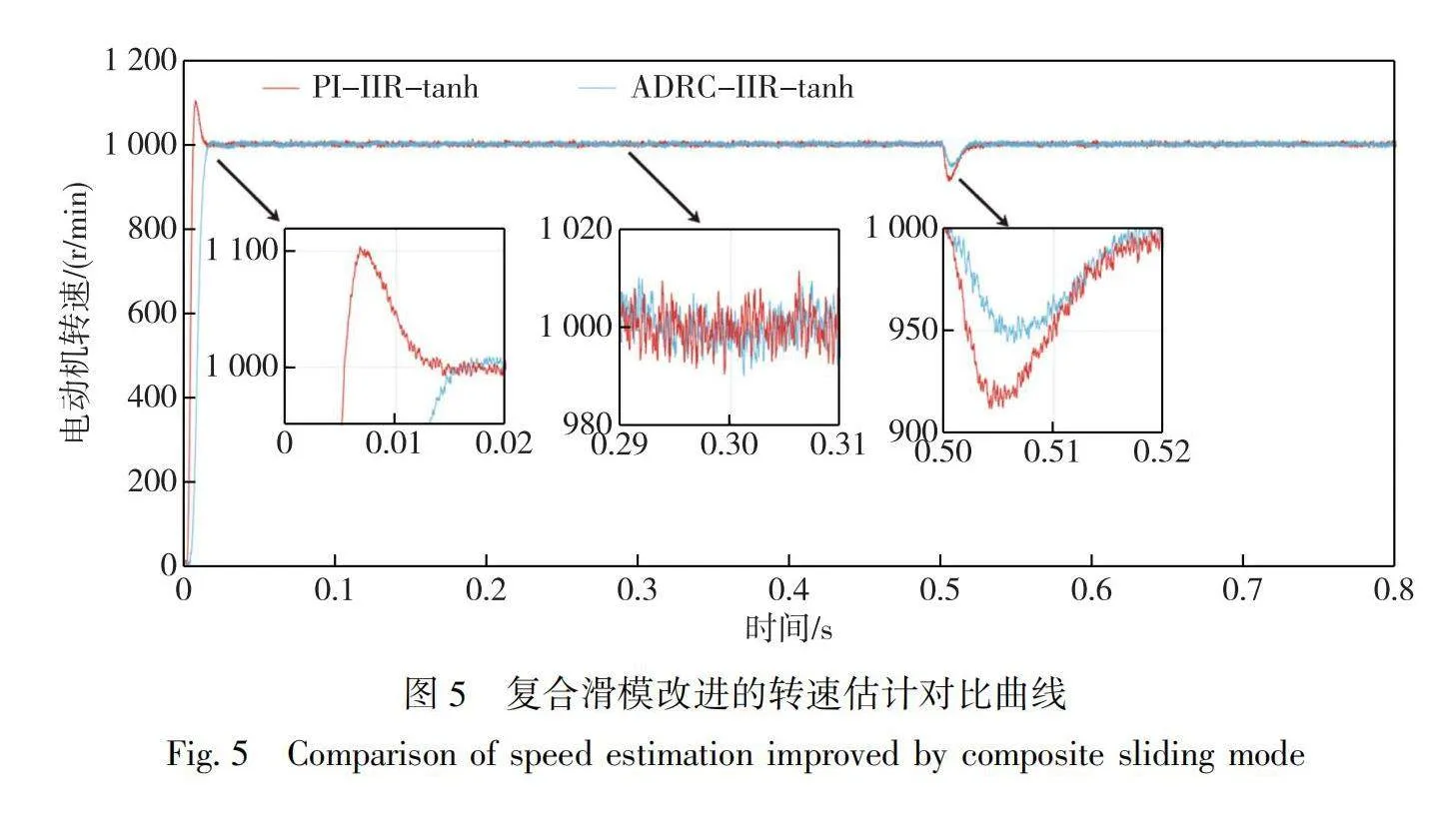
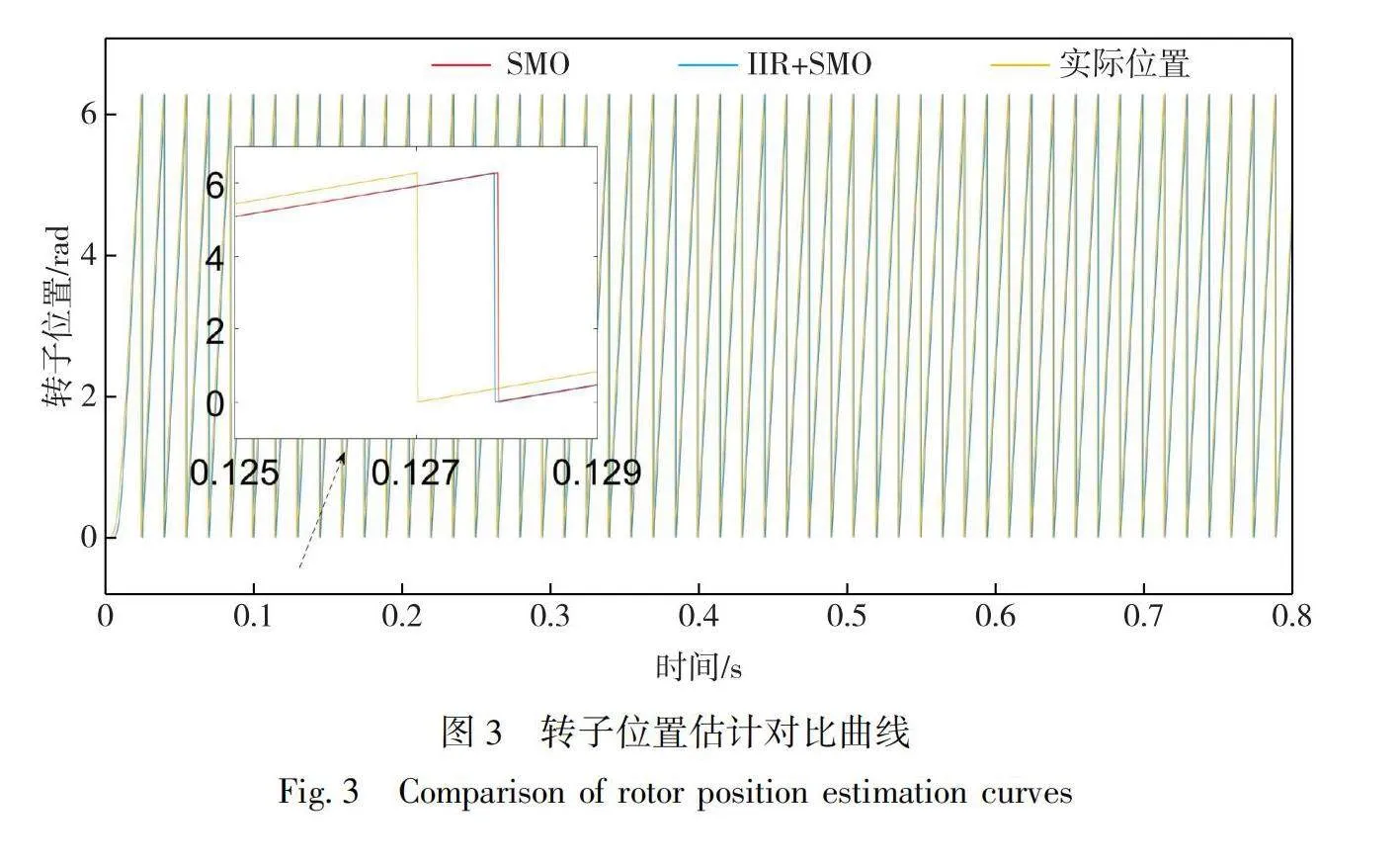
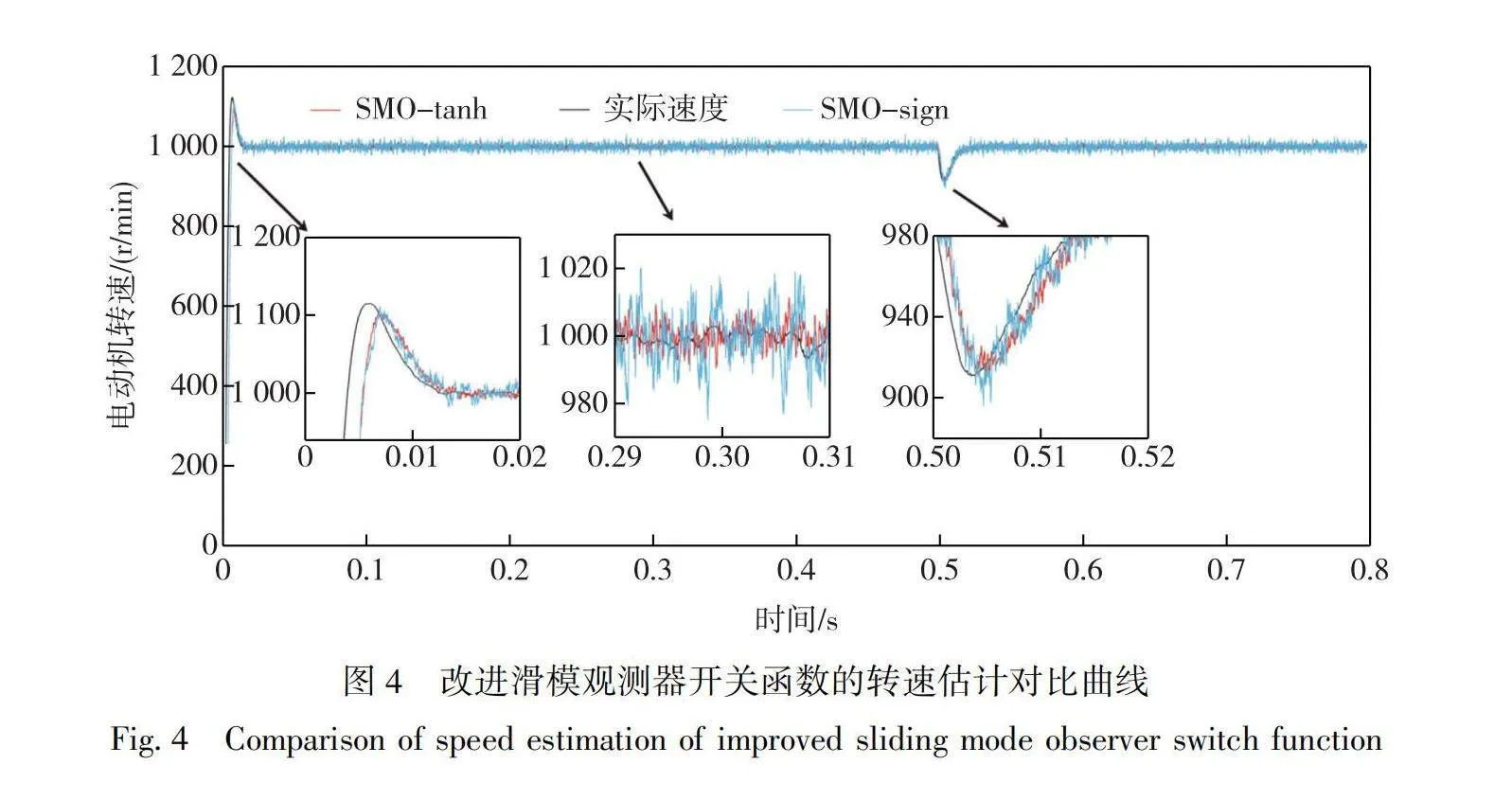
图3为转子位置估计对比曲线.由图3可知,无限脉冲响应滤波器+改进的滑模观测器可以略微减小转子位置偏差,所得结果更加贴近实际转子位置.图4为对传统滑模开关函数进行改进后,估计的转速的对比曲线.其中:黑色曲线为实际转速;蓝色曲线为传统滑模观测器估计的转速曲线,稳态误差在±2.1%;红色曲线为改进滑模观测器开关函数方法估计的转速曲线,稳态误差在±0.9%.由图4可知,转速估计的稳态误差降低了57%,改进滑模观测器可以有效减小转速抖振.图5为基于图4加入无限脉冲滤波器后,改进转速环控制器的对比曲线.将开关函数的改进、无限脉冲响应滤波器改进和转速环ADRC的改进称为复合滑模改进.其中:红色曲线为转速环PI控制器曲线,有11%的启动超调,且在突加负载时,转速下降8%;蓝色曲线为转速环ADRC控制器曲线,快速性无明显差异,但无超调,且突加负载时,转速下降4%.由图5可知,ADRC对转速环的改进可以消除超调,抗扰性提高近50%.
实验结果如图6所示,分别观察电机在500和1 000 r/min 时的转速,因为加入了自抗扰控制器,转速的超调量得到了良好的改进.对滑模观测器的改进以及加入无限脉冲响应滤波器滤波,也使得速度估计抖振更小,速度跟踪效果更佳.
4 结论
文中针对滑模观测器存在的抖振问题,将无限脉冲响应滤波器运用于转速估计中,并在此基础上运用双曲正切函数改进了滑模观测器,速度环运用自抗扰控制器进行改进.在相同条件下,进行仿真以及实验,结果表明:文中所设计的改进,能减小转速估计的抖振,且具有更优的鲁棒性和速度跟踪性能.
参考文献
References
[1] Sira-Ramírez H,Linares-Flores J,García-Rodríguez C,et al.On the control of the permanent magnet synchronous motor:an active disturbance rejection control approach[J].IEEE Transactions on Control Systems Technology,2014,22(5):2056-2063
[2] 禹聪,康尔良.永磁同步电机模糊滑模无位置传感器控制[J].电机与控制学报,2024,28(1):87-94 YU Cong,KANG Erliang.Fuzzy sliding mode position sensorless control of permanent magnet synchronous motor[J].Electric Machines and Control,2024,28(1):87-94
[3] Gong C,Hu Y H,Gao J Q,et al.An improved delay-suppressed sliding-mode observer for sensorless vector-controlled PMSM[J].IEEE Transactions on Industrial Electronics,2020,67(7):5913-5923
[4] Xu W J,Qu S C,Zhao L,et al.An improved adaptive sliding mode observer for middle- and high-speed rotor tracking[J].IEEE Transactions on Power Electronics,2021,36(1):1043-1053
[5] Kivanc O C,Ozturk S B.Sensorless PMSM drive based on stator feedforward voltage estimation improved with MRAS multiparameter estimation[J].IEEE/ASME Transactions on Mechatronics,2018,23(3):1326-1337
[6] 尹姝,陈元橼,仇翔.基于RFID和自适应卡尔曼滤波的室内移动目标定位方法[J].南京信息工程大学学报(自然科学版),2018,10(6):749-753
YIN Shu,CHEN Yuanyuan,QIU Xiang.Indoor moving-target localization using RFID and adaptive Kalman filter[J].Journal of Nanjing University of Information Science & Technology (Natural Science Edition),2018,10(6):749-753
[7] Sul S K,Kwon Y C,Lee Y.Sensorless control of IPMSM for last 10 years and next 5 years[J].CES Transactions on Electrical Machines and Systems,2017,1(2):91-99
[8] 李浩源,张兴,杨淑英,等.基于高频信号注入的永磁同步电机无传感器控制技术综述[J].电工技术学报,2018,33(12):2653-2664
LI Haoyuan,ZHANG Xing,YANG Shuying,et al.Review on sensorless control of permanent magnet synchronous motor based on high-frequency signal injection[J].Transactions of China Electrotechnical Society,2018,33(12):2653-2664
[9] Qiao Z W,Shi T N,Wang Y D,et al.New sliding-mode observer for position sensorless control of permanent-magnet synchronous motor[J].IEEE Transactions on Industrial Electronics,2013,60(2):710-719
[10] 麦志勤,刘计龙,肖飞,等.基于锁相环的永磁同步电机无位置传感器控制[J].电力电子技术,2017,51(7):97-99 MAI Zhiqin,LIU Jilong,XIAO Fei,et al.Permanent magnet synchronous motor sensorless control based on PLL[J].Power Electronics,2017,51(7):97-99
[11] Ye S C,Yao X X.A modified flux sliding-mode observer for the sensorless control of PMSMs with online stator resistance and inductance estimation[J].IEEE Transactions on Power Electronics,2020,35(8):8652-8662
[12] Agrawal N,Kumar A,Bajaj V.Design of infinite impulse response filter using fractional derivative constraints and hybrid particle swarm optimization[J].Circuits,Systems,and Signal Processing,2020,39(12):6162-6190
[13] Lu H,Li S Q,Feng B,et al.An enhanced sensorless control based on active disturbance rejection controller for a PMSM system:design and hardware implementation[J].Assembly Automation,2022,42(4):445-457
[14] 韩京清.自抗扰控制技术[J].前沿科学,2007,1(1):24-31
HAN Jingqing.Auto disturbances rejection control technique[J].Frontier Science,2007,1(1):24-31
[15] 贺顺,温秀兰.基于EtherCAT的六自由度自平衡平台设计[J].南京信息工程大学学报(自然科学版),2020,12(3):384-389
HE Shun,WEN Xiulan.Six degree-of-freedom self-balancing platform design based on EtherCAT[J].Journal of Nanjing University of Information Science & Technology (Natural Science Edition),2020,12(3):384-389
[16] Gao Z Q.Scaling and bandwidth-parameterization based controller tuning[C]//Proceedings of the 2003 American Control Conference.June 4-6,2003,Denver,CO,USA.IEEE,2003:4989-4996
Design of speed sensorless control for PMSM based on improved sliding mode observer
CHAI Chenglong1 LI Juan1 LI Shengquan1 CHEN Xing1
1 College of Electrical,Energy and Power Engineering,Yangzhou University,Yangzhou 225127,China
Abstract To address the challenges of accurately estimating rotor speed and position using the Sliding Mode Observer (SMO) due to high-frequency chattering,and the poor robustness and speed tracking performance of the speed loop PI controller,we propose an improved SMO-based speed sensorless control scheme for Permanent Magnet Synchronous Motor (PMSM).First,an Infinite Impulse Response (IIR) filter is incorporated into the SMO within the Direct Torque Control (DTC) system to mitigate the high frequency noise in the SMO output.Then a continuous hyperbolic tangent function is adopted to replace the discontinuous sign function to attenuate the system chattering.Moreover,an Active Disturbance Rejection Control (ADRC)-based speed loop controller is designed to optimize the trade-off between the overshoot and settling time of the system.Finally,a hardware-in-the-loop experimental platform is established in Matlab/Simulink environment.Both simulation and experimental results show that,under identical load and interference conditions,the proposed ADRC-based speed sensorless controller outperforms traditional speed sensorless control systems,effectively suppressing the chattering and exhibiting superior robustness and speed tracking performance.
Key words permanent magnet synchronous motor (PMSM);sliding mode observer (SMO);infinite impulse response (IIR) filter;active disturbance rejection controller (ADRC)
