盾构机在地铁隧道施工中的掘进姿态控制方法
2024-11-01 00:00:00许良生
工程机械与维修 2024年5期


摘要:论述了盾构机掘进姿态预测、轨迹纠偏规划、算法寻优偏差控制等方面盾构机掘进姿态控制方法,以实际工程为例,通过应用本文所述控制方法进行了盾构机位姿纠偏的模拟实验,实验结果表明,本文所述控制方法能够控制盾构机按给定的轨迹进行跟踪纠偏,提升了盾构机运行过程中的响应速度,达到了盾构机姿态控制要求,获得了较好纠偏效果。
关键词:地铁工程;盾构机;隧道掘进;姿态控制
0 引言
相比于传统的掘进技术,盾构机具有隧道掘进和管片拼装两种工作状态,适用于不同地下隧道工程施工[1]。同时盾构机能够在不同地质环境中达到较好施工效果。在通过对盾构机盾构姿态、角度参数等信息进行调整后,能够得到盾构部位不均匀沉降的原因。通过分析受力原因,改变盾构前后盾构机姿态相差数据,纠正盾构机偏离隧道轴线的趋势。在掘进过程中,掘进轨迹与铁路设计轴线重合,能够较好控制盾构机的姿态。这样可以提升施工效果,在各类建筑工程中也被广泛应用[2]。通过结合特殊设计,实现地铁隧道结构稳定,实现对于轨迹跟踪精度的提升。同时盾构机能够调整滚转角的纠偏,使得在每次掘进过程中,在拼装管片时需要不断调整与改变刀盘角度,这样能够有效控制纠偏,提升方法应用过程中的实时性,避免人工调节产生局部受力过大的情况。
通过对盾构机的姿态进行调整,能够使得盾构机的掘进过程中更加顺畅。盾构机在掘进过程中姿态对于地铁隧道走向十分重要,如果盾构机在进行隧道掘进过程中,没有将两台盾构机的掘进精度进行调整,会导致管线在对接中出现问题,使得隧道施工结果无法达到预期[3]。本文以东莞地铁1号线大湿区间为背景,针对盾构区间内基岩凸起情况,对盾构机在地铁隧道施工中的掘进姿态的控制方法进行研究,并结合实际工程开展模拟实验和分析。
1 盾构机掘进姿态控制方法
1.1 盾构机掘进姿态预测
1.1.1 应用小波变换法
在盾构机掘进过程中,需要分析其受力状况、调整其盾构姿态。结合盾构机在掘进中的自身条件,建立其掘进姿态预测模型。应用小波变换法(时频分析法)对数据进行去噪处理。将信号分解成不同分辨率水平的子频谱。提取盾构数据特征,增加一个存储时间序列信息的单元来解决RNN(循环神经网络)缺陷。时间序列通过算法进行分解的公式如下:
x(t)=A(t)+D(t) (1)
式(1)中:x(t)为时间序列,A(t)为原始信号,D(t)为分解过程中的噪声信息。根据分辨率达到数据序列,将噪声信号去除后重构为新的信号。
1.1.2 应用卷积神经网络技术
在卷积神经网络中输入盾构机在掘进施工过程中的灰度图像。并且在模型中设定输入层的长宽像素值。对卷积层进行映射,将滤波器与局部连接后得到权重矩阵,将原始图像卷积到对应的特征映射中。其卷积方法的公式如下:
(2)
式(2)中:αij为卷积方法,x为输入图像,w为权重矩阵,ƒ为激活函数。
通过映射后提取图像的特征。运用池化层对映射后的特征结果进行采样,运用全连接层进行结果预测。在预测过程中,引入LSTM(长短期记忆递归神经网络)对盾构机在掘进过程中的姿态进行预测。
向模型中输入变量为盾构机运行参数,并设定在某一段时间内的参数数据,来预测步距。当预测步距等于预测长度时,能够使得模型连续滚动预测。通过预测可以实现输入盾构机运行过程中的初始数据,输出盾构姿态在未来过程中发生变化的趋势,能够起到对未来姿态偏差进行预判的作用。
1.2 盾构轨迹纠偏规划
1.2.1 盾构轨迹纠偏的重要性
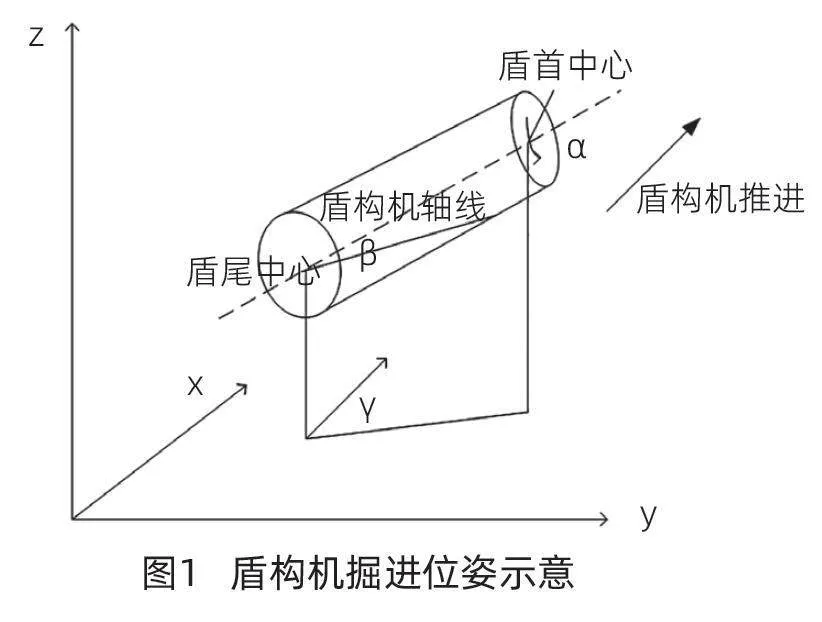
在盾构机掘进过程中,需要测量当前位置信息,从而获得该位置中的角度偏转数值。设定盾构机的轴线方向,在水平方向中运用俯仰角表示盾构机的误差角度。在盾构机掘进过程中,需要对其俯仰角进行控制。如果没有得到有效控制,则盾构机在竖直方向中的姿态就会产生偏移,会造成盾构施工中发生地面沉降。盾构机在掘进过程中的位姿示意如图1所示。
1.2.2 盾构轨迹纠偏方法
在盾构机掘进施工中,需要通过判断来实时调整其位置。对测量到的数据进行判断,才能得到盾构机是否按照给定轨迹运行、是否产生偏移。所以通过位姿测量能够有效进行盾构控制。
在测量过程中使用全站仪,通过发出激光被标靶接收,在任意时间内进行测量[4]。使用倾角仪来测量盾构机的俯仰角。利用坐标系,根据盾构机具体的位置移动坐标,计算得到盾构掘进过程中首尾两端的坐标值。根据给定线路,对坐标进行比较后获得对应的偏差,根据偏差可以进行轨迹纠偏规划。
1.2.3 盾构轨迹纠偏种类
在进行轨迹纠偏规划时,需要根据实时姿态测量的结果判断纠偏的不同种类。如果在偏差允许范围内,则不用展开纠偏。在实际施工中,为了满足盾构施工时的最小转弯半径,需要进行余量保留。考虑到在地铁行驶时,遇到拐弯处能够产生一定的向心力,所以为了减少掘进风险,选择曲线进行轨迹纠偏规划。
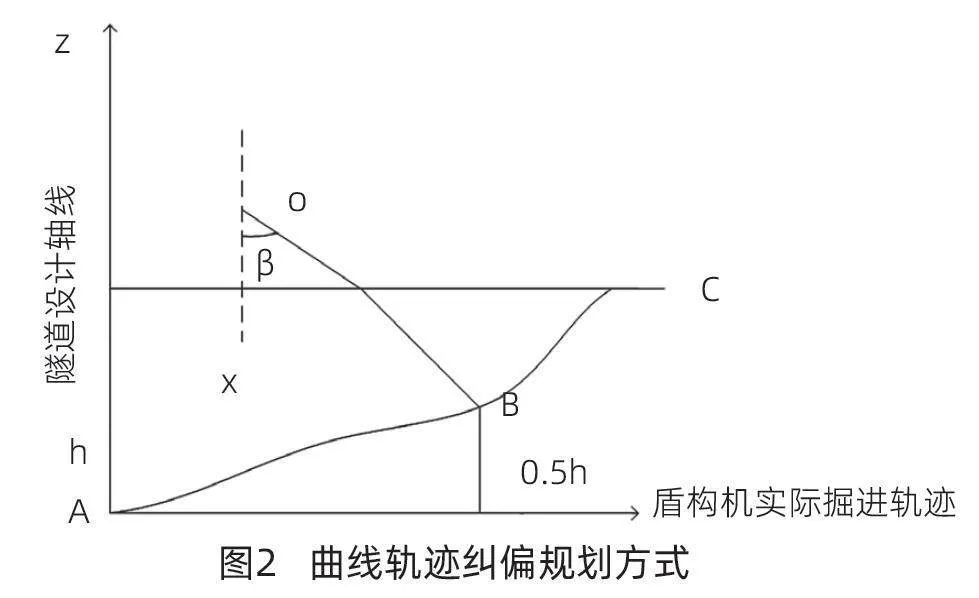
1.2.4 轨迹纠偏规划方式
在符合地铁行驶要求的前提下,设定纠偏路段为AB和BC,其轨迹纠偏规划方式如图2所示。
设定纠偏曲线的长度为rmin。如果AB长度等于该值时,则说明纠偏长度为最短。通过设计不同的曲线进行不同间距之间的直线拟合,能够提升控制精度,完成对轨迹纠偏路线的设计[5]。在盾构机运行安全约束条件下,操纵盾构机在直线段进行施工,能够降低掘进难度。
1.3 算法寻优偏差控制
1.3.1 运用PSO算法
对盾构机掘进过程中的姿态进行控制,需要运用PSO(粒子群优化)算法,设定种群粒子的数量为n,全局最优步长为c,个体粒子的最优步长为cq。使个体能向其他更好的微粒进行学习,调整目标点的飞行位置。如果cq取值较大,使得粒子向目标位置前进的时间较短,会造成目标位置偏移;如果cq值较小,也会存在一定偏移。
1.3.2 动态改变惯性系数
通过动态改变惯性系数,在搜索初期设定系数为b。通过在搜索范围中进行计算,能够确定目标的大致区域。在搜索过程中,不断进行寻优,调整b值,使得能够在局部区域中完成算法寻优。在保证算法的收敛时,得到速度更新公式为:
(3)
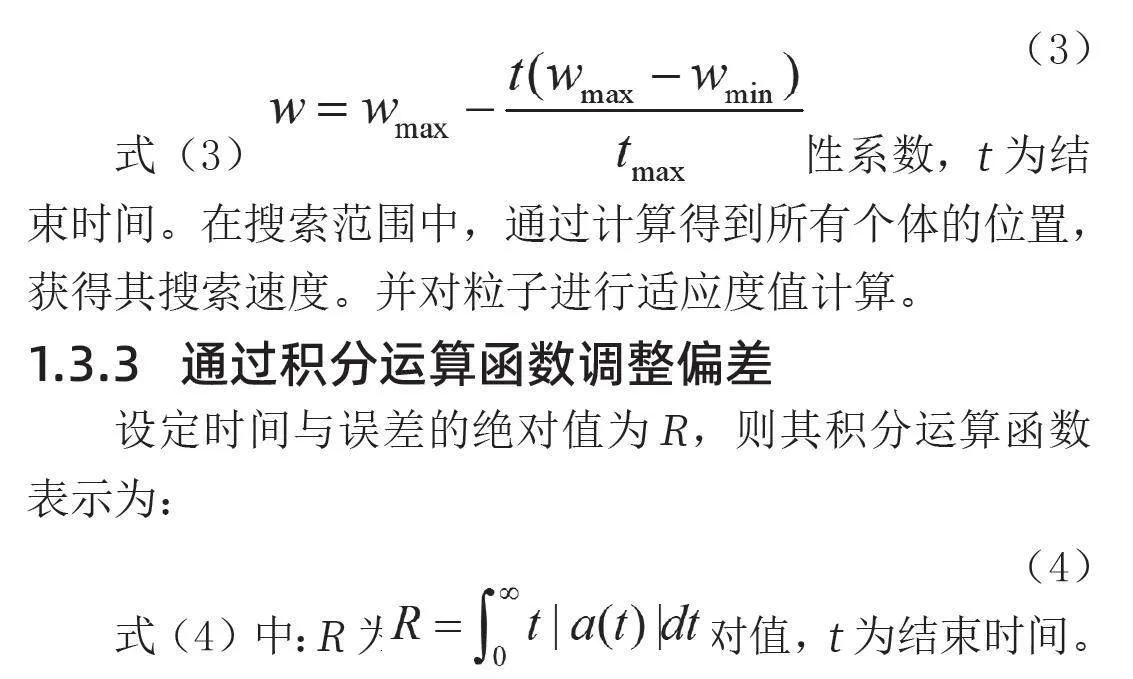
式(3)中:w为不同时间段中的惯性系数,t为结束时间。在搜索范围中,通过计算得到所有个体的位置,获得其搜索速度。并对粒子进行适应度值计算。
1.3.3 通过积分运算函数调整偏差
设定时间与误差的绝对值为R,则其积分运算函数表示为:
(4)
式(4)中:R为时间与误差的绝对值,t为结束时间。
考虑到实用性,函数能够抑制误差,将其代入函数可得到粒子的位置结果。将与之前位置进行比较,如果较优则进行位置更新[6]。将所有个体均代入到函数中求值,并获得全局最优解。
设定控制的模糊规则,结合实际情况进行不断修正,调整盾构机的响应速度。对不同偏差情形,按照控制规则进行提取,当偏差较大或过小时需要及时纠偏。在实际施工中,如果掘进过程中左侧油压较大,则需要控制铰接角为正,使得盾构机向左偏转,通过调整位置和角度偏差,即可完成姿态控制。
2 实例分析
2.1 工程概况
东莞市城市轨道交通1号线一期工程大朗站-湿地公园站区间属于剥蚀残丘地貌,地势整体呈现西北向东南逐渐降低趋势。钻探结果显示,局部里程段内中、微风化混合花岗岩埋深较浅。在区间两端、在设计孔深范围内钻孔,中、微风化混合花岗岩埋藏相对较深,存在基岩凸起。基岩凸起附近,基岩面起伏较大,软硬不均现象严重,对盾构机掘进及隧道稳定性影响较大。且基岩凸起段中、微风化混合花岗岩突入隧道内,岩石饱和抗压强度值约在20~155MPa范围内,最大值为155MPa。
2.2 纠偏方法
运用本文所述控制方法进行盾构位姿纠偏。盾构机在进行竖直方向纠偏过程中,圆弧曲线纠偏能够使盾构机返回到隧道设计轴线上。在安排合理的纠偏路径后,对盾构机在竖直方向中的位姿进行调整。设定盾构机出现A25模式姿态问题,并设定隧道的设计轴线为纵面的不同段参数,将各曲线段的参数进行计算后,运用MATLAB(矩阵实验室)绘制成纵面曲线图。纵面线形基本参数如表1所示。
综合纵面线性方程绘制三维坐标下的隧道设计轴线,通过曲线方程生成拟合点。在生成拟合点坐标后表示为给定轨迹,对纠偏曲线进行仿真。
2.3 测试方法
为验证本文所述盾构掘进姿态控制方法在实际工程中的仿真实验是否具有较高准确性,设置了3个测试小组。其中运用本文所述控制方法的为测试小组1,运用传统方法的为测试小组2和3。在盾构机掘进过程中,对不同分区的液压缸进行姿态控制,设计仿真实验、搭建实验模型,对3个测试组的竖向位置纠偏曲线与给定轨迹进行比较,判断是否符合姿态控制要求。
2.4 测试结果与分析
在A25模式姿态问题中,对3个测试组的竖向位置纠偏曲线的仿真结果如图3所示。
通过图3可知,测试小组1的轨迹与给定轨迹重合。而其他测试小组的轨迹与给定轨迹发生幅度偏移。这说明运用本文所述控制方法能够有效保证纠偏曲线与设计轴线保持一致状态,达到较好的姿态控制效果。纠偏半径与实际半径之差较小,在实际施工中能够调整和减少误差较大的姿态问题。
综上所述,在盾构机的控制中,能够满足实际的需求,通过控制策略使得盾构机能够按给定的轨迹跟踪纠偏,达到较好的纠偏效果。通过对初始偏差的调整,使得偏差值以较快速度降为0。在控制中能够保持较小的跟踪误差,提升了盾构机运行过程中的响应速度,达到了盾构机的姿态控制要求。
3 结束语
本文从盾构机入手,结合实际,探究了地铁盾构机掘进姿态控制方法。通过对盾构机下坡掘进时的姿态进行校正,对纠偏力矩进行设定,有效避免了盾构机偏移,能够确保盾构机在作业过程中荷载相对稳定。但是方法中还存在着一些不足,在以后的研究中应随时优化控制方法,提升控制的准确性,以有效提高盾构工程施工质量。
参考文献
[1] 王永锋.双导线在地铁盾构区间控制测量中的应用[J].建筑技术,2022,53(9):1191-1194.
[2] 吴敏敏,刘先行.风化花岗岩地层中地铁盾构隧道施工关键技术[J].铁道建筑,2022,62(3):132-135.
[3] 黄君.富水饱和砂性地层盾构长距离连续掘进施工技术[J].施工技术,2021,50(5):117-122.
[4] 章龙管,刘绥美,李开富,等.基于故障树与贝叶斯网络的地铁盾构施工风险预测[J].现代隧道技术,2021,58(5):21-29+55.
[5] 董宇.复合地层中土压平衡盾构机掘进状态评估[J].铁道科学与工程学报,2021,18(8):2114-2120.
[6] 董伟东,郭浩,罗海波,等.主动铰接型盾构机自动导向系统测量与姿态精密解算方法[J].测绘通报,2022(1):149-154+158.