基于激光雷达的井下带式输送机边缘提取方法
2024-10-31 00:00:00黄晨烜常健王雷
工矿自动化 2024年9期
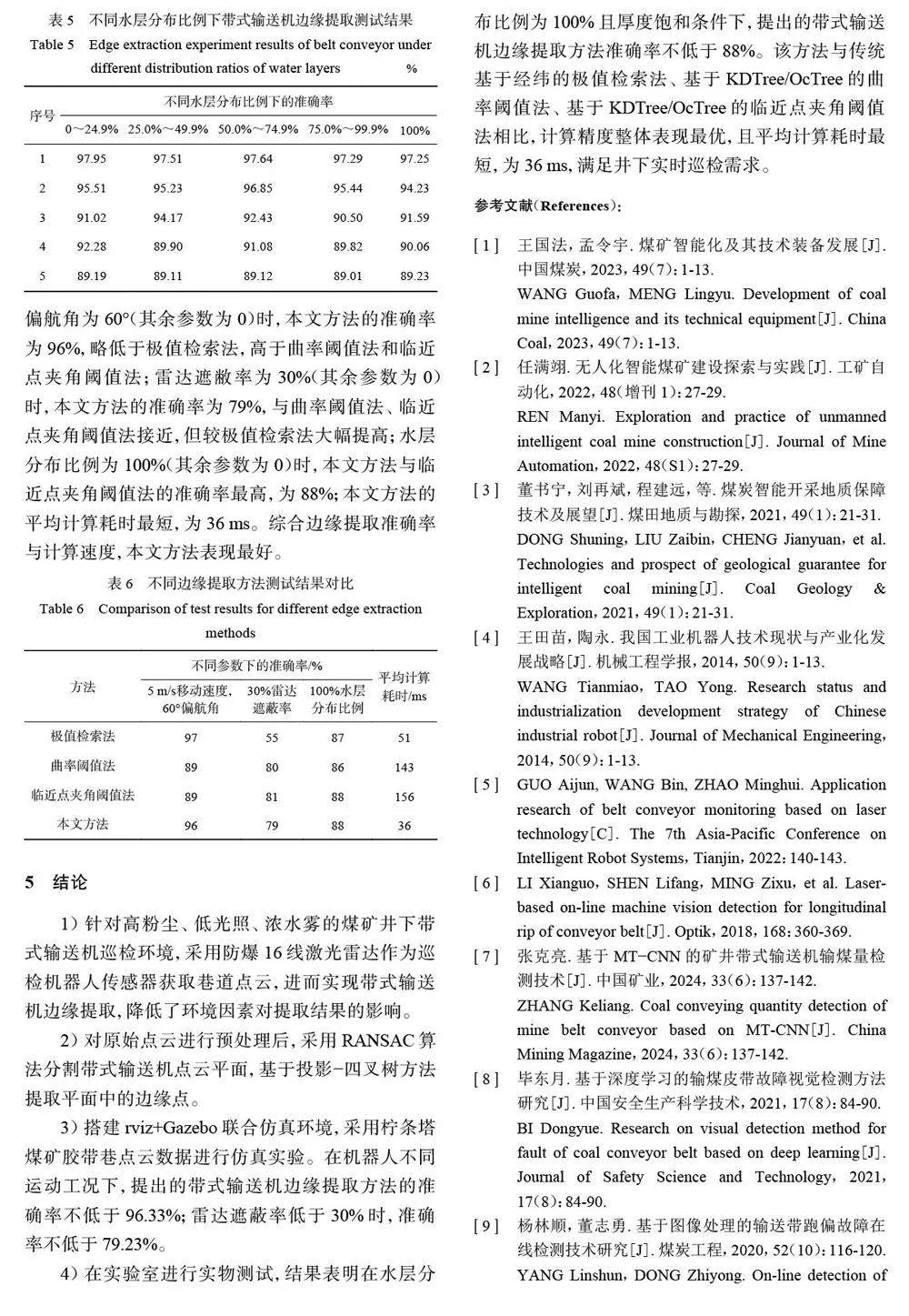

摘要:带式输送机是煤矿井下非结构化胶带巷中巡检机器人的巡检对象之一,且其边缘提取可使机器人获取自身相对检测目标的空间位姿,为执行巡检任务提供环境信息支持。目前井下大多采用基于视觉的边缘提取技术,难以有效克服照度低、粉尘大、水雾浓等问题。针对该问题,采用防爆16 线激光雷达作为巡检机器人传感器获取巷道点云,以降低环境对提取结果的影响。对获取的原始稀疏点云进行统计离群值移除和直通滤波预处理,以去除噪声和无用点云,采用随机样本一致算法分割带式输送机点云平面,基于投影−四叉树方法提取带式输送机边缘点云。rviz+Gazebo 联合仿真结果表明:在机器人不同运动工况下,带式输送机边缘提取的准确率不低于96.33%;雷达遮蔽率低于30% 时准确率不低于79.23%。实验室测试结果表明:带式输送机表面水层分布比例为100% 且厚度饱和条件下,边缘提取准确率不低于88%,整体优于基于经纬的极值检索法、基于KDTree/OcTree 的曲率阈值法、基于KDTree/OcTree 的临近点夹角阈值法,且平均计算耗时仅为36 ms,满足井下实时巡检需求。
关键词:非结构化巷道;胶带巷;巡检机器人;带式输送机;激光雷达;稀疏点云;边缘提取
中图分类号:TD67 文献标志码:A
0 引言
随着煤矿智能化建设的推进,越来越多的智能机器人正代替人工步入井下工作岗位。在煤矿胶带巷巡检任务中,巡检机器人除了基础的自主移动及导航外,还需执行带式输送机堵塞识别、煤流量检测等任务[1-3]。巡检过程中机器人实时将自身的位姿及检测目标当前的状态反馈给控制端,供下一步决策用。而在非结构化的胶带巷场景下[4],机器人可用于确定自身位姿的环境参照物较少,导致其运动自主性不足。带式输送机作为该场景中少数特征较明显的物体,其边缘的支架、托辊等结构不仅全局位姿固定,且可始终保持在传感器感知范围内。此外,带式输送机本身是机器人的主要巡检目标。因此,对带式输送机边缘进行提取及位姿解算,不仅可使机器人准确获取自身的全局位姿,还可使机器人获取待检测目标的相对位置,保障其顺利完成巡检任务。
井下巷道环境的非结构化问题较为突出,导致目前少有能够实际应用于胶带巷的巡检机器人。因此,现有的带式输送机边缘提取技术大多采用固定于带式输送机上下侧的视觉相机作为传感器。视觉相机的像素精度能够满足边缘提取任务需求,且相机本体通常符合井下防爆标准。若额外采用结构光照射进行辅助, 则可提升提取结果的鲁棒性[5-6]。在视觉提取研究方面, 现有方法大多基于CNN(Convolutional Neural Networks,卷积神经网络) [7-8]、Canny 算法[9-11]等实现。这2 种方法成熟度较高,但分别存在对数据集质量依赖较重、不适应昏暗杂乱环境的问题。此外,视觉算法对环境粉尘状况较为敏感,经常在相机表面受污染的情况下输出伪边缘或直接提取失败[12]。针对该问题,有学者采用调整特征算子的方式进行改善[10],但放宽了图像边缘判定的标准,导致提取精度较差。因此,机器视觉方式不便应用于存在粉尘、水雾及光照条件不断变化的移动巡检任务中。
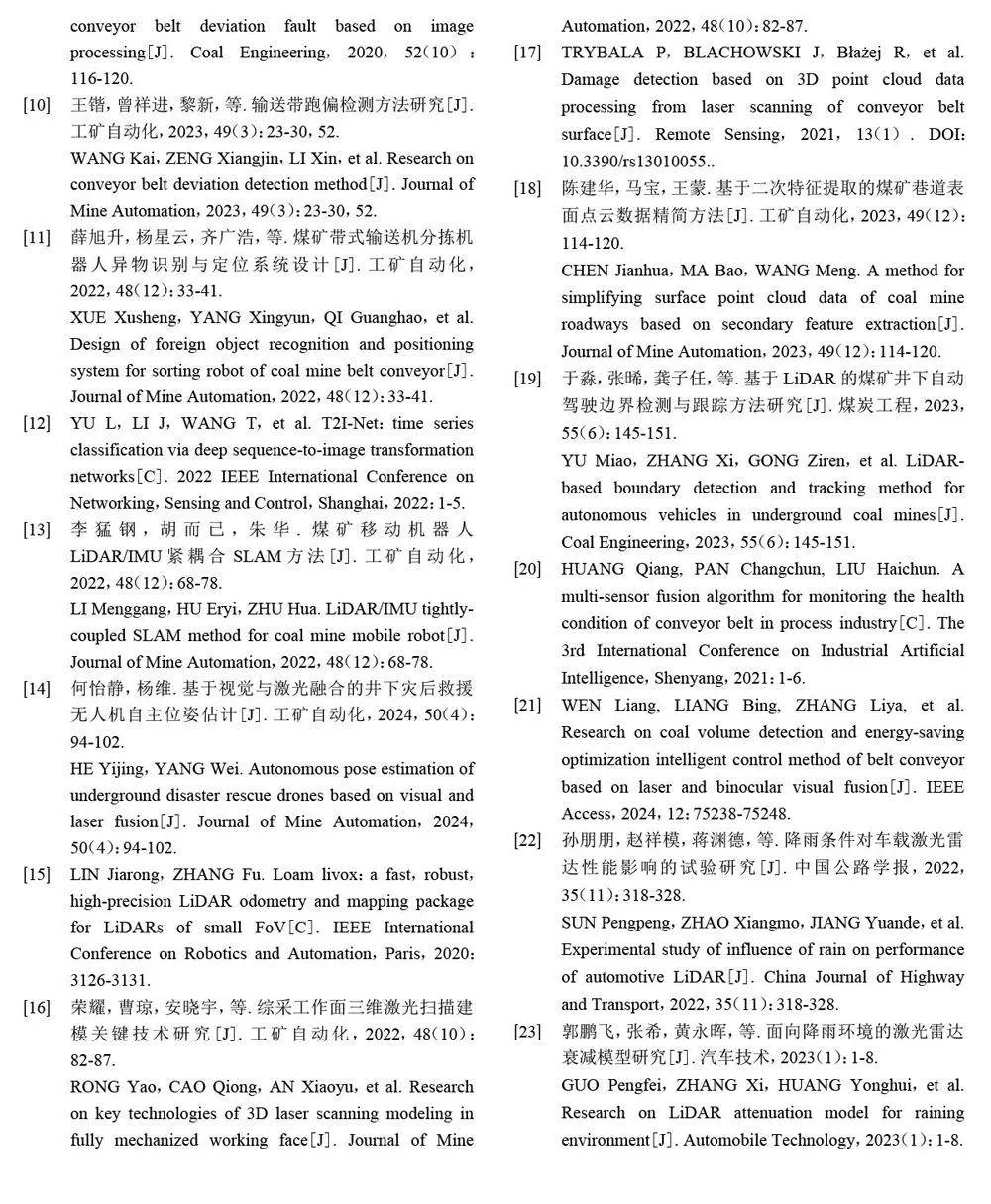
激光雷达能有效应对上述问题。目前采用激光雷达(包括固定式激光雷达、部署于移动机器人上的激光雷达)进行井下带式输送机边缘提取的研究较少,主要原因是当前煤矿机器人相关产业建设正处于初期,另外《煤矿安全规程》对激光雷达等电气设备的功率有防爆限制。目前可用于井下的为功率较低、精度较差的单线或16 线激光雷达。单线激光雷达采集的信息仅是传感器所在二维平面中物体的距离信息,在井下复杂巡检环境中缺乏足够的应用价值;16 线激光雷达采集的信息是水平360°、分辨率0.1°及垂直30°、分辨率2°的点云,原始信息量是单线雷达的16 倍,但与普遍应用于地面自动驾驶的128 线激光雷达相比,其信息密度较为稀疏。虽然目前将激光雷达技术应用于带式输送机点云边缘提取的研究较少,但其他场景中的研究成果可以借鉴。在泛用性较强的点云特征提取方面: 李猛钢等[13]、何怡静等[14]采用经典的LOAM(LidarOdometry and Mapping, 雷达里程计及建图)技术提取点云中的线、面特征; Lin Jiarong 等[15]改进了传统LOAM 特征识别方式,提出LOAM−livox 算法,实现了传统基于曲率的特征提取方法在井下的应用。在煤岩界面识别方面:荣耀等[16]采用弦法向量法分析数值点与其邻域法向量的夹角,并基于阈值筛选非煤壁与顶板交线点云,实现对顶板−墙壁交界线的提取。在大规模稠密点云方面:P. Trybala 等[17]采用固定的TLS(Terrestrial Laser Scanner,地面激光扫描仪器)提供高精度点云,但未考虑煤矿设备防爆要求及设备的灵活性问题;陈建华等[18]对巷道表面点云邻域进行二次分析,借助点云法向量特征逐次筛选特征区域及特征点,提高了特征提取效率。在巷道车辆循迹方面:于淼等[19]从BEV(Bird's Eye View,鸟瞰图)角度分析井下车墙碰撞问题,采用卡尔曼滤波方式实现可行驶边界的提取,但缺乏对带式输送机、施工标志等障碍物的考虑。
除以上单独基于视觉或激光的方式外, HuangQiang 等[20]、Wen Liang 等[21]采用视觉相机+激光雷达方式,由视觉相机提供高精度的X,Y 轴像素信息,由激光雷达提供高精度的Z 轴距离信息,实现输送带边缘提取,但该方式仍以视觉算法为主,只采用激光点云提供额外的景深信息,在环境条件良好的情况下可满足应用需求,但无法有效克服照度低、粉尘大、水雾浓等问题,对人工维护依赖大。
针对煤矿井下胶带巷复杂恶劣的巡检环境,本文采用激光雷达代替视觉相机实现带式输送机边缘提取, 设计了一种基于RANSAC(Random SampleConsensus,随机样本一致)平面分割与投影−四叉树结构的边缘提取方法,并通过仿真及实验室测试验证了该方法在机器人不同运动工况及不同环境条件下的提取效果。