机载激光雷达技术在公路三维地形采集中的应用研究
2024-10-30 00:00李旭秦敬钧郑克西赵志强蒙建强青志勤李世俭
交通科技与管理 2024年19期






摘要 该研究以30 km山地密林区高速公路为对象,比较了无人机航空摄影和三维激光扫描技术在生成DEM(数字高程模型)时的精度。结果显示:三维激光扫描技术因其高频率和强植被穿透性,能更准确地获取地面高程,生成符合公路地形测量要求的DEM成果,用以辅助施工决策与设计更具优势。
关键词 无人机;三维激光扫描;航空摄影;DEM
中图分类号 TU312 TU313.3 文献标识码 A 文章编号 2096-8949(2024)19-0001-04
0 引言
随着交通基础设施的快速发展,地形测量在高速公路线路规划设计、土方量测算、运维地质安全评估等方面发挥着至关重要的作用[1-2]。传统的全站仪、GPS-RTK地形测量技术虽然在过去几十年中取得了发展,但在带状长距离、地形起伏大、高落差、茂密植被的高速公路地形测量作业中仍存在效率低、难度大、施测条件要求高等局限性,已无法满足现代公路施工进度与质量要求,近年来,无人机航空摄影技术与无人机三维激光扫描(LiDAR)技术的兴起为公路地形测量带来新的解决方案。
在现代公路工程中,无人机航空摄影技术使用航摄仪从空中采集地面影像,通过航片重建的三维倾斜模型仍存在纹理贴图错位、拉花变形、Mesh破洞等问题,后期修模难度大、时间久,影响内业判读地物、地貌要素信息,导致绘图精度下降甚至无法采集,而无人机三维激光扫描技术以其高效率、高精度、时效性强、植被穿透能力强的特点成为公路地形测量的热点技术。
尽管已有许多研究关注两项技术的应用效果,但针对其在公路地形测量中的应用与分析仍不充分[3-6]。鉴于此,该文以两项技术在公路工程应用案例,分析其对山区植被茂盛区域地形测量的精度准确性,以期为此类项目的实施提供技术参考。
1 工程概况
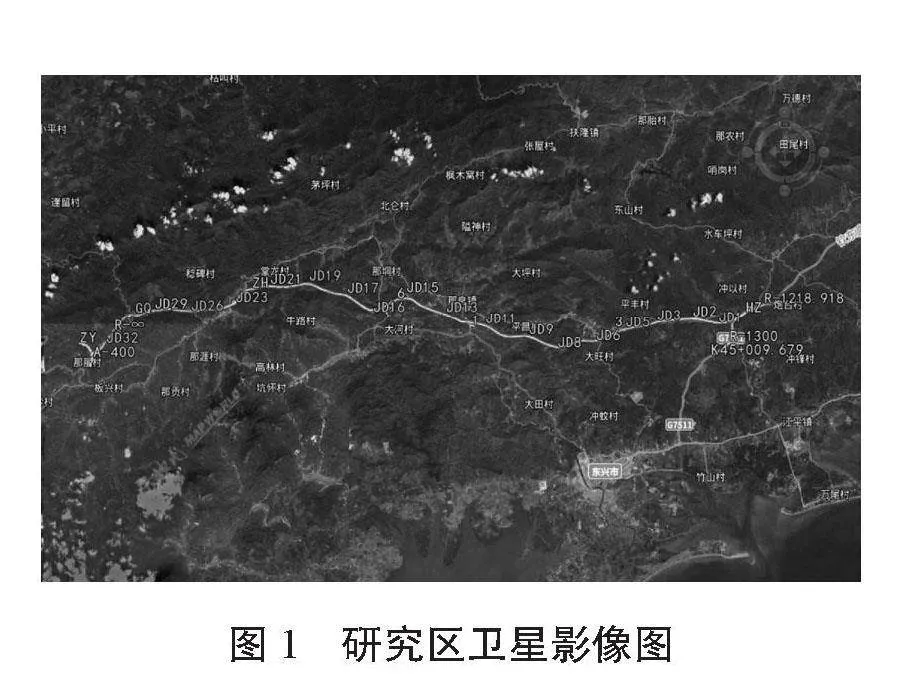
该工程位于广西河池市宜州某在建高速公路施工段,地形陡峭、地质复杂、植被丰富,测区内地物要素包括道路、乡村建筑、山地、河流和边坡等,山地占83%,最大落差500 m。要求成果平面坐标系为2 000国家大地坐标系,中央子午线107°10′,投影高程抵偿面230 m,高程基准为1985国家高程,成图比例尺1∶500,方格间距0.5 m,研究区卫星影像如图1所示。
2 实施技术路线
2.1 控制点布设
该文研究使用广西连续运行卫星定位系统(GXCORS)和中海达A40GPS-RTK设备,采集满足公路工程需求的控制点信息,坐标系为国家2000大地坐标系,通过CORS中心模型将大地高数据精化为1985国家高程基准。
2.2 外业数据获取
2.2.1 航空摄影影像获取
无人机航空摄影技术通过搭载感测设备,实现影像采集,由无人飞行器、机载传感器和地面控制系统组成。该技术具有灵活性高、成本效益好和适应性强等特点,相比传统航空摄影有显著优59i/1Scw0Y8Cl5c7vAygTA==势。
该研究使用搭载Share102SV3五镜头相机的DJIM300-RTK无人机,有效像素超1.25亿,进行山区地带状公路地形测绘。像控点统一布设于固定、平整、清晰区域,构成“Z”形均匀分布,使用GPS-RTK和GXCORS账号进行静态测量。飞行参数包括RTK模式、仿地飞行332 m、GSD5 cm、航向重叠80%、旁向重叠70%、飞行速度12 m/s。每架次约30 min,共9架次完成一天的数据采集,技术流程如图2所示。
2.2.2 三维激光点云获取
机载激光雷达集成了三维激光扫描、GPS和INS技术,安装在无人机上,通过发射和接收激光束,实时确定飞行器和地表物体的三维信息,广泛应用于地表空间信息数据收集。
该次作业使用SF1200四旋翼无人机飞行平台挂载SA130雨燕激光雷达测量系统,该激光雷达测量系统具备1 500 m有效测距、7次反射回波、200万点每秒、相对精度优于3 cm、绝对精度优于5 cm等卓越性能,面对山势陡峭、地质复杂、植被茂密的带状长距离公eU5O/fTlBKz/EDoT1es9uQ==路工程项目,航飞设计采用RTK作业模式,仿地航高350 m,激光旁向重叠率35%,飞行速度12 m/s,每架次作业时间约50 min,共作业6架次,一天时间完成点云数据采集,航飞作业的同时RTK采集检查点用于检查解算点云数据质量,技术流程如图3所示。
2.3 内业数据处理
2.3.1 三维倾斜模型重建
此次外业航空摄影作业共采集39 104张倾斜航片,使用DJITerra集群软件智能化协同处理倾斜航片,完成空三前航片影像、POS、相机参数预设置后,运行首次空三加密提取连接点,接着导入像控点,自动刺点优化空三,最后设置输出坐标系、兴趣区域范围、分块尺寸、模型原点,水面平整完成三维重建,输出三维倾斜模型,如图4所示。
基于三维倾斜模型使用南方航测三维测图软件uFeature3D自动提取地表高程点,对于植被大面积遮挡高程推测区域,通过实地调绘计算树高平均值,并参考周边裸露平坦地面内插高程,对提取的树冠表层高程扣除树高平均值后,经过人工裸眼三维编辑核查,创建不规则三角网TIN,构建输出DEM。
2.3.2 点云数据处理
此次外业三维激光扫描作业共采集103 GB原始数据,经过SouthLidarPro软件联合POS、姿态、轨迹、可见光照片解算点云,如图5所示。
通过控制点计算参数完成工程坐标系坐标转换,自动航带平差优化点云高程,导入点云检查点核查原始点云质量,使用Lidar360-UAV软件激光雷达地形模块功能完成数据处理:(1)点云MLS法平滑减少噪声和测量误差,使数据更加规则和平滑;(2)点云均匀重采样改善点云的质量和处理效率;(3)点云邻域标准差去噪消除数据中的错误或噪声点;(4)点云自动分类AI识别高中低植被、建筑物、地面点等地物类别;(5)人工手动点云分类核查修正软件自动分类的错误类别;(6)创建不规则三角网TIN,构建输出DEM,如图6所示。
3 成果精度验证与分析
根据《基础地理信息数字成果1∶500、1∶1 000、1∶2 000数字高程模型》(CH/T 9008.2—2010)、《机载激光雷达数据获取技术规范》(CH/T 8024—2011)、《工程测量通用规范》(GB 55018—2021)中规定的1∶500数字高程模型中误差精度,具体要求如表1所示。
结合高速公路施工技术要求,其高程中误差应不大于该表“一级”指标要求。使用GXCORS基站GPS-RTK动态测量法或全站仪极坐标法在研究区视野开阔的硬化路面、变坡处、林下地面等场景均匀采集247个野外85高程控制点数据进行检查,使用Arcgis软件分别提取检查点所在位置,并使用无人机航空摄影技术与无人机三维激光扫描技术数据处理生成的DEM高程值,如图7所示,将检查点与DEM逐个比对高程差值并统计差值区间个数。
基于无人机航空摄影技术生产的DEM高程差值在0.6~0.8之间占比最高达31.2%;基于无人机三维激光扫描技术生产的DEM高程差值在0~0.2之间占比最高达82.2%。
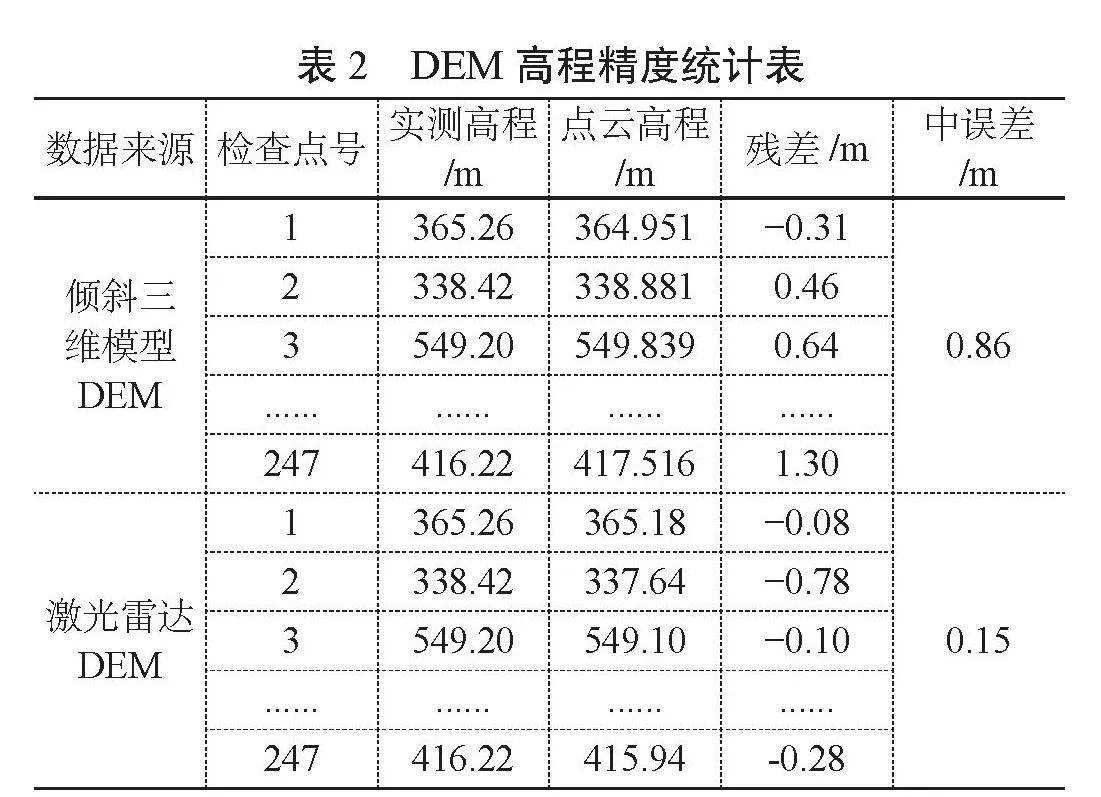
精度比较情况如表2所示。基于无人机航空摄影技术生产的DEM高程中误差为0.86 m,基于无人机三维激光扫描技术生产的DEM高程中误差为0.15 m。分析其原因:(1)倾斜三维模型因部分纹理贴图错位、拉花变形、Mesh结构不完整、破洞等问题影响内业判读提取高程点精度;(2)倾斜三维模型在密林原始地貌高程推测区无法准确估算扣除树高获取林下地面高程;(3)带状高速公路测区航空摄影航片质量易受光照条件影响,导致倾斜三维模型精度下降,而激光雷达得益于高点频、多次回波数、光斑尺寸小、植被穿透能力强的特点,其生产的DEM达到1∶500数字高程模型“一级”指标精度。
4 结论与展望
该文以山势陡峭、地形环境复杂、植被茂密的30 km高速公路施工段作为研究区,分别应用无人机航空摄影技术与无人机三维激光扫描技术获取外业数据,通过内业处理生成DEM数字高程模型并分析比对两者高程精度误差,结果表明:无人机三维激光扫描技术满足1∶500数字高程模型精度要求,能提供高精度数字化地形模拟数据用于公路工程纵、横断面勘察设计、填挖方量测算、施工进度监测管理等业务场景。
后续的研究需要深入探讨无人机激光雷达(LiDAR)在各种环境条件下的适用性和可靠性。这包括考虑极端天气,如风暴、雪、雨,以及复杂地形,如山脉、森林、城市区域,对测量精度的可能影SGkga+Y4gvIu7kCR5tP5+mRNq7w8Bmt/FtATt1lQhDU=响,此外随着人工智能和机器学习技术的不断进步,如何将这些技术融入点云数据的处理过程,实现自动识别和分类,也将是后续研究的关键领域。同时,设备的小型一体化,性能提升和成本控制仍将是技术发展的主要趋势,这将使这项技术更加普及和便捷。最后,集成多传感器系统以获取更全面的地形信息,将是提升公路工程地形测绘整体解决方案的关键。
综上所述,无人机搭载的三维激光扫描技术已经成为公路工程地形测量的重要工具。随着技术的不断发展和应用的深化,这一领域将继续拓展新的边界,推动传统测绘向更高精度、更高效率和智能化方向发展。
参考文献
[1]李雍友,林广泰.无人机技术在平南三桥建设中的应用[J].西部交通科技,2020(11):70-73+80.
[2]马文安,李雍友,孙辉,等.无人机技术在公路工程建设管理中的应用[J].公路,2021(5):213-217.
[3]吴志涛.倾斜摄影与激光雷达扫描技术在制作山地等高线中的应用与分析[J].工程技术研究,2023(19):81-83.
[4]黄树生.RTK和全站仪在野外地形测量中的运用[J].低碳世界,2014(5):123-124.
[5]顾鹏飞,刘文文,李晗.无人机载激光雷达在公路勘测设计中的应用[J].测绘与空间地理信息,2021(6):177-180.
[6]张琴,李亚琼.基于倾斜摄影技术的DEM生产及质量控制[J].江西测绘,2022(3):28-30+52.
收稿日期:2024-06-20
作者简介:李旭(1971—),男,本科,高级工程师,主要从事高速公路施工、项目管理及数字化研究应用等工作。
通讯作者:秦敬钧(1994―),男,本科,工程师,主要从事公路工程测绘工作。