基于OpenMv的目标控制与自动追踪系统
2024-10-23 00:00王健王金玉王邦刘俊凯苑会远
今日自动化 2024年5期

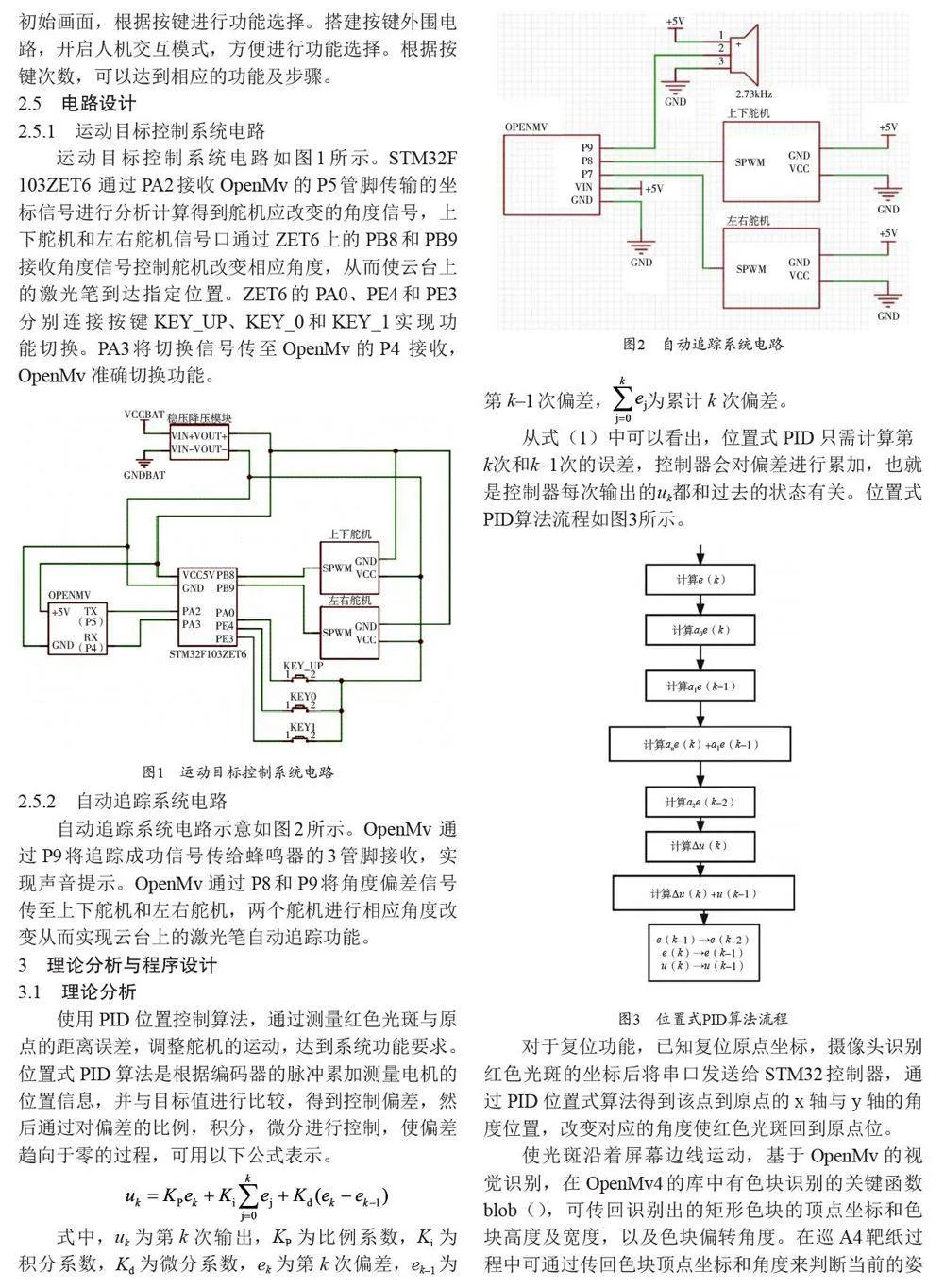


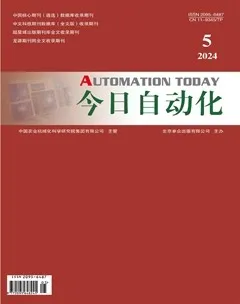
[摘 要]设计基于OpenMv 的目标控制与自动追踪系统,以 STM32F103 芯片为核心,通过视觉模块OpenMv 进行图像处理,实现边缘循迹功能,借助二维电动云台绑定激光笔进行模拟运动目标和自动追踪效果。STM32 单片机通过计算路径的偏差,采用位置式PID 算法实现了红绿光斑轨迹的精准控制,同时使用声音模块和LED 模块来实现声光提示。结果表明,该系统可应用于各种需要目标追踪的场景,具有较高的实用性。
[关键词]STM32 ;OpenMv 图像处理;二维电动云台;位置式PID
[中图分类号]TP391.41 [文献标志码]A [文章编号]2095–6487(2024)05–0160–04