
典型民机电传飞控系统架构分析
2024-10-12 00:00:00管庭筠张睿刘程
机电信息 2024年19期


摘要:详细研究了目前在国内民航业广泛使用的干线飞机A320、B777的电传飞控系统架构,对上述电传飞控系统的组成、布局、架构设计特征、工作模态等进行了梳理和分析,同时也总结了在飞控系统开展工程设计过程中涉及的如基于模型的飞控系统开发、飞控系统终极备份系统设计、机载系统适航技术、软件形式验证等热门技术问题,对今后电传飞控系统开展系统设计具有良好的参考意义。
关键词:电传;飞控;系统架构;适航技术
中图分类号:V249.1 文献标志码:A 文章编号:1671-0797(2024)19-0075-06
DOI:10.19514/j.cnki.cn32-1628/tm.2024.19.018
0 引言
飞控系统作为现代民用客机的关键系统,其正常工作与否直接关系到整个飞机的安全性、可靠性以及航班运营的经济性。整个民用飞机飞控系统经历过多个发展阶段:从早期的单纯机械操控到增稳与控制增稳系统,再发展到当前的电传飞控系统[1]。整个系统由纯机械式控制发展到结合液压助力及功率作动器的控制系统,演变到基于模拟电子的飞控系统,再发展到全权限的数控电传飞控系统。其中机械配液压助力系统的典型代表为波音公司开发的B707客机的飞控系统,装配有模拟电子飞控计算机的典型机型有空客A300、波音B727/B737 Classic/B747、洛克希德L1011、麦道DC9/DC10、图-144以及协和飞机等,基于电传飞控系统的典型客机有空客A320/A330/
A350/A380、波音B777/B787等。纵观整个飞控系统发展过程,系统的安全性与可靠性不断提高,同时整个飞控系统向着集成化、综合化、智能化的方向发展。
本文对国内外主流民用客机的飞控系统架构进行了分析,同时梳理了当前飞控系统研发过程中的热点问题,可为后续研制提供支持与参考。
1 民机飞控系统的基本功能和组成
1.1 民机飞控系统的基本功能
现代民机飞行控制系统可以定义为将飞行员的飞行控制指令传递到飞机相应的操纵舵面实现对飞机的姿态/模态等控制的系统。典型的民机飞行控制功能主要是稳定和控制飞机的刚体运动,解决飞机的稳定性和操纵性问题。
飞行控制系统通常分为人工飞行控制系统和自动飞行控制系统。按照ATA100(Air Transportation Administration,航空运输协会)对飞机内部系统分类的编排,人工飞行控制系统属于ATA100-27章节,自动飞行控制系统归属ATA100-22章节,人工飞行控制系统又分为主飞行控制系统和高升力飞行控制系统。其中主飞行控制系统通过驾驶侧杆或驾驶盘等感知驾驶员的指令,经过控制律计算,指令作动器动作,控制副翼、升降舵、方向舵、扰流板、水平安定面等舵面运动,最终实现飞机的横滚、俯仰、偏航控制及配平;高升力飞行控制系统通过襟缝翼手柄感知驾驶员指令,经计算机计算,指令作动器动作,调节襟翼、缝翼的位置,最终实现增加飞机在起飞、降落过程中的升力。自动飞行控制系统通过飞行模式控制面板感知驾驶员指令,经过控制律计算,使得飞机能够按设定的航向、航迹、速度以及高度飞行。
1.2 民机飞控系统的主要组成
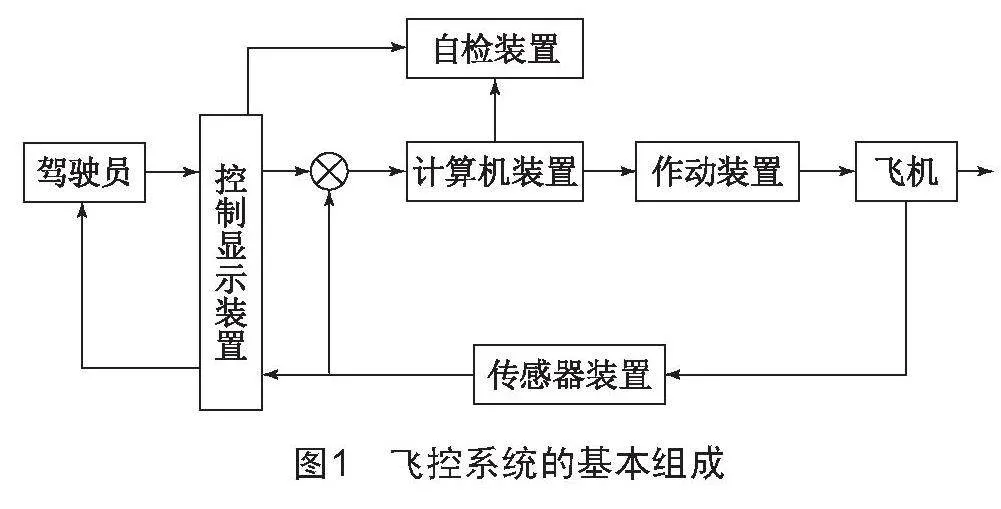
通常而言,现代飞行控制系统中包括控制与显示装置、传感器装置、计算机装置、作动器和自检装置以及专有的信息传输链和接口,形成了一条闭环反馈回路,具体如图1所示[2]。
类似地,现代民机飞控系统各子系统也囊括了显示告警、计算、作动、传感等模块。主飞行控制系统主要包括控制显示装置、飞行控制计算机、伺服作动装置、直接模式运动传感器等;高升力系统主要由襟缝翼控制计算机、襟缝翼操纵杆、襟缝翼驱动装置、襟缝翼驱动装置等组成;自动飞行控制系统是由控制系统来代替驾驶员操纵,其核心就是自动飞行控制计算机[3]。
2 国内外典型民机飞控系统介绍
当前,我国民航领域运营较广泛的为空客系列和波音系列飞机以及刚刚投入商业运营的中国商飞研制的干线飞机,本章简要介绍其代表机型空客A320、波音B777等的飞控系统架构。
2.1 A320客机
空客飞机作为大型民用电传飞机的代表,推出过多个机型,从早期的A320、A330、A340到最新的A350和A380,最为经典的是A320系列。
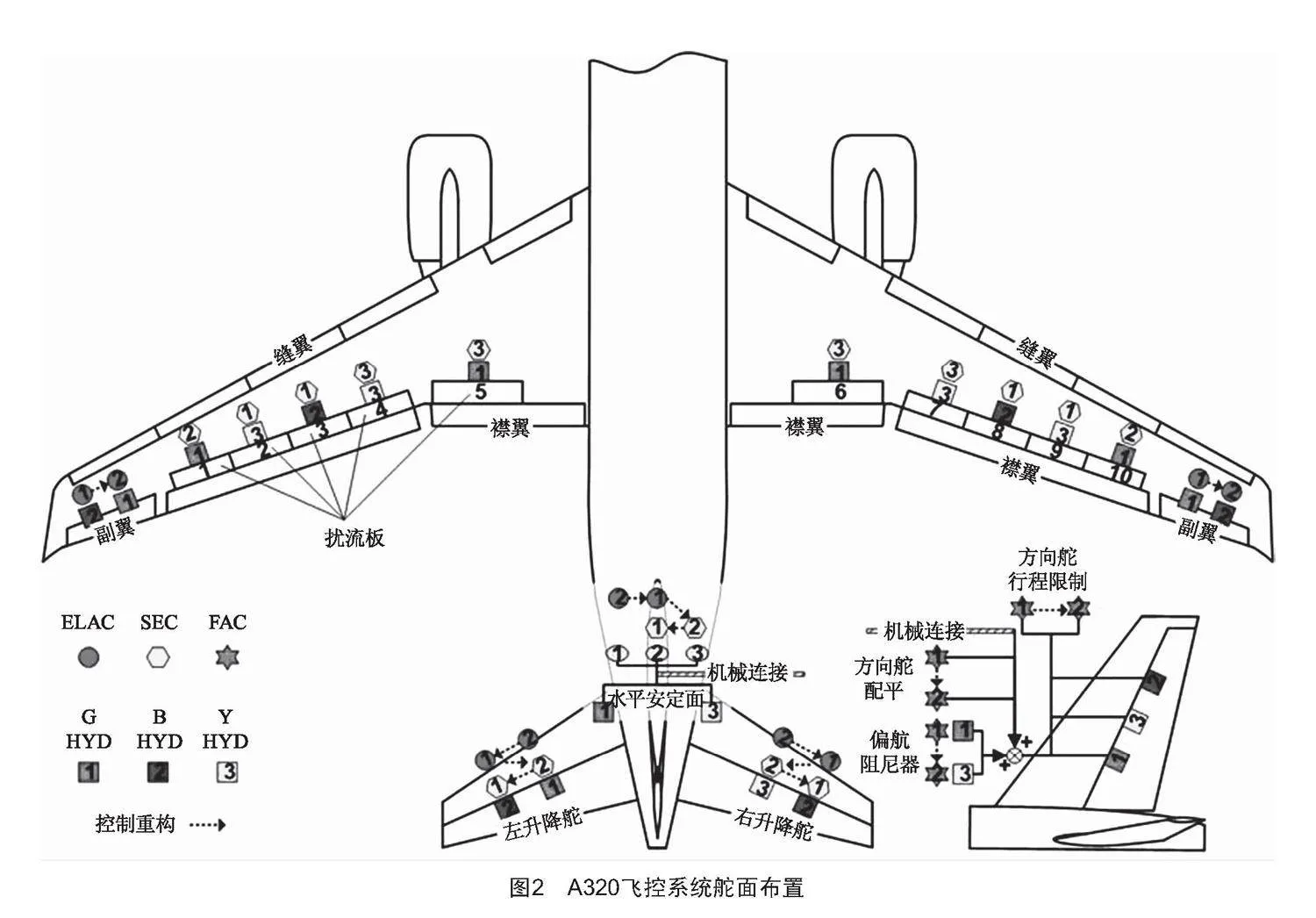
A320系列飞机是空客公司研制生产的150座级单通道双发中短程干线客机,包括A320、A321、A319、A318、A320 NEO等。空客A320系列客机的整体尺寸与波音737系列客机相当,其两侧机翼上布置有一对副翼、五对扰流板以及前缘缝翼、后缘襟翼等增升装置,尾翼布置有一块水平安定面、一对升降舵和一块方向舵。其舵面布置如图2所示[4]。
A320客机作为世界上第一架应用电传飞控系统的民用大型客机,具有以下设计特点:飞控系统采用了先进的控制律进行全时间控制,保留了常规系统良好的特性;在驾驶舱创新性地引入被动侧杆,替代传统的驾驶盘,它是世界上第一架采用侧杆控制的电传控制系统的民机;空客飞控系统的设计理念为尽可能简化飞行员的驾驶操纵,降低人工操纵的工作负荷,转而由飞控计算机来实现控制,所以飞控计算机是系统的核心,通过处理飞行员的输入,经过控制律计算后输出飞控作动器的控制指令;此外,空客飞机的飞控系统在俯仰和滚转轴向设计有包线保护功能,计算机可以阻止飞行员进行超越飞行包线的操纵;空客A320飞控系统在水平安定面和方向舵控制中均设计了机械装置,作为终极备份系统的一部分。
A320飞控系统的物理架构如图3所示,整个系统由9台计算机和相应的作动器组成,包括2个升降舵副翼计算机(ELAC),控制副翼、升降舵和水平安定面作动器;3个扰流板和升降舵计算机(SEC),控制所有扰流板作动器,同时也作为升降舵和水平安定面控制的备份;2个飞行增稳计算机(FAC),提供偏航阻尼、配平和行程限制功能;2台襟缝翼计算机(SFCC)专门用来处理襟翼和缝翼的控制[5]。
A320飞行控制系统设计有三种控制模式:正常控制模式、降级控制模式、直接控制模式。其中,正常控制模式包括实现基本的三轴控制、飞行包线保护控制等功能,当出现故障时,整个系统将自动降级为降级控制模式。当A320的部分飞控计算机失效后,系统将按照既有的逻辑进行故障重构,当所有飞控计算机失效后,终极备份启用,飞行员可通过脚蹬直接控制方向舵,通过平尾人工配平手轮实现水平安定面控制,为飞机提供一定的俯仰和偏航控制能力,直到电传飞控系统重新启动。
2.2 B777客机
美国波音公司作为历史最为悠久的民机主制造商,其主要的系列机型有B707、B727、B737、B747、B777、B787,其中B777是一款由波音研制的中远程双发宽体客机。B777系列飞机包括777-200、777-200ER、777-200LR、777-300、777-300ER、777F、777X等,其飞控系统采用了较为传统的外型布局,两侧机翼上布置了一对外侧副翼、一对襟副翼、七对扰流板以及前缘缝翼、后缘襟翼等增升装置,尾翼布置了一块水平安定面、一对升降舵和一块方向舵。具体的舵面布置如图4所示[6]。
作为波音公司第一款采用电传飞行操控系统的飞机,B777的电传飞控系统具有以下设计特点:控制面采用先进的控制律进行全时间控制,同时改进了控制特性,保留了常规系统的良好特性,进一步提高了可靠性和维修性;在设计中采用了包线保护设计,在系统的余度设计中采用了“主-主”设计理念。
B777飞控系统物理架构如图5所示,整个系统主要由以下部件构成:3余度主飞行控制计算机PFC、4余度作动器控制电子装置ACE、动力控制单元PCU、驾驶杆/盘、脚蹬、ARINC629总线等。其中ACE是一种模拟设备,其功能是与飞行员控制传感器接口,并以模拟伺服回路控制作动器。ACE将驾驶员控制器位置和舵面位置信号转换为数字量,然后通过ARINC629总线传给PFC,PFC的主要作用是将系统采集到的大气数据以及各类传感器的输入信号进行处理并结合预先写入PFC中的控制律,基于位置反馈信号计算舵面指令,将舵面指令通过ARINC629总线回传给ACE,由ACE转换成模拟信号,用来控制作动器。
B777的飞控系统有正常模式、次级模式和直接模式三种控制模式,驾驶员可通过直接模式开关实现模式切换。B777依然保留了一套机械控制机构,以控制水平安定面和两对多功能扰流板作为整个飞控系统的终极备份。
3 飞控系统技术热点问题
现代民机电传飞控系统作为一个高复杂度的系统需要实现多项关键功能,整个飞控系统研发过程涉及系统工程、软件工程、电子电气工程、机械工程等多个工程,此外,严苛的安全性需求也给飞控系统的工程研制提出了不少挑战。国内外的民机主要承制商以及飞控系统供应商在电传飞控系统的研发中投入了大量的成本去解决技术难点,国外飞机主制造商以及系统供应商凭借其多年的工程经验已经攻克了诸多技术难点,这部分已经被攻克的技术难点也都受到专门的知识产权保护。我国作为自主研发民机的后进者,虽然部分技术难点已经被突破,但一些较为核心的技术难点还未被完全攻克,本节简要梳理了目前民机电传飞控系统研发过程中的技术难点,以供参考。
3.1 系统技术热点
民机飞控系统的架构设计受安全性需求、功能需求、成本、重量等诸多条件的约束,而安全性需求始终是民机研发首先要考虑的需求,在系统层级,主要通过独立性、非相似设计以及完整性监控等三个方面来提高整个系统的安全性。通过系统设计确保在系统内不同通道电气、物理以及功能上的彼此独立,防止故障的蔓延;系统设计过程中要求同一功能的冗余单元采取两种或多种控制方式;对于执行复杂逻辑运算的飞控计算机,设计监控通道以实现对指令的完整监控。目前主流的先进民机飞控系统普遍采用了无机械备份的全权限电传飞控系统,但当所有的计算机均发生故障而失效时,如何才能确保飞控系统仍然实现对飞机安全稳定的控制?目前,在工程实践上的一种解决思路是在原有的飞控系统架构上添加一套额外的、能够实现最小可接受控制能力的系统作为终极备份系统。但是如何保证终极备份系统在需要掌握控制权限时可以快速接权安全操控,又要在处于备份等待的过程中不能影响或干扰原主控系统功能的正常使用,是目前业内的研究热点之一。
3.2 基于模型的系统开发技术
飞控系统作为一个具有数十个功能的大系统,其中某些功能的丧失或者错误的执行都会直接导致灾难级事件的发生,所以这些功能都具有最高的安全性等级。此外,这些功能还涉及多个外部交联系统,其综合系统架构往往比较复杂,主要体现在多个系统的集成工作量庞大、多系统接口的数量巨大、多系统协同工作的逻辑复杂。
传统的系统工程设计主要是基于设计文档和制图的方法开展,文档的非形式化特征使得不同的工程设计人员会对文档形式的设计方案产生理解偏差,增加了不同系统成员之间协同工作的沟通成本。随着产品设计的不断深入,实际设计与设计文档之间的同步会耗费大量的时间和人力成本,甚至也会增加设计差错出现的概率。针对上述问题,基于模式的系统工程开发方法将提供一个解决途径,通过统一的系统建模语言对复杂的飞控系统开展建模,将不同专业领域的描述集中到完整的系统中,这样就最大程度地减少了在需求定义阶段对需求理解的歧义,在设计开发到样机实现再到验证的后续阶段,整个研发过程中,以模型为数据传递的介质,如此便提高了研发效率[7]。目前的工程实践中,基于模型的系统工程与传统基于文档的设计并存,基于模型的系统工程方法只是应用于一些简单系统中,如何将基于模型的系统工程方法合理应用于复杂的飞控系统研发活动中?另外,SysML作为一门系统建模语言,其本身的学习难度不小,如何能够通过优化建模语言来实现更为形式化的建模,都是目前研究的热点。
3.3 形式化软件验证技术
飞控系统中的飞控计算机、作动控制计算机中存在着大量的机载软件,是实现飞控控制律计算的重要核心。软件的质量和可靠性相比硬件更低,更易发生故障,此类故障会对飞机的运营安全产生很大的负面影响,甚至造成灾难性后果。2009年,法航空客A330客机由于空速传感器发生故障,飞控系统发出了错误的爬升指令,飞控系统的机载软件中未设置爬升升限高度,最终导致了坠机事故。所以,进一步提高飞控机载软件代码的安全性和可靠性,愈发成为提高民机飞控系统安全性的关键所在。虽然DO-178制定了严格的软件开发和验证流程,但传统的软件验证手段如测试、模拟及仿真,究其本质,都是在力求寻找软件的BUG,而被测的软件是否有BUG是无法证明的,因此难以完全保证软件代码的可靠性和安全性[8]。业内近来开始使用的软件形式化验证方法通过严格的数学语义进行推演,可从逻辑上证明软件是没有BUG的。然而目前基于形式化的软件验证技术大部分还处在理论层面上,如何将理论研究的成果更好地应用于飞控系统软件验证工程,也是当前业内关心的技术热点。
3.4 适航技术
民机适航取证是确保大型客机满足按公众要求制定的、可接受的最低安全标准的管理和技术实现过程。民机产品在研制过程中包含了设计、制造和验证等活动,而针对每项开展的活动,申请人都需要用客观记录反映活动真实发生的详实可靠的数据来表明所研制民机产品以及系统对适航规章的符合性[9]。
对于运输类飞机,现行有效的适航标准是CCAR25R4、CCAR25R4中的条款,涵盖了对于不同设计特征飞机和预期使用条件的飞机适航要求。因此,在确定审定基础时,需根据飞机的设计特点和预期使用条件梳理合适的适航条款。但是,鉴于适航条款制定之时的技术现状、对于安全性理解程度以及由于适航标准不可能穷尽也不可能遇见所有可能的情况,适航标准本身就存在一定的局限性,所以适航标准制定本身也是当前业内研究的热点之一。
此外,目前民机飞控系统的设计已经完全由机械式转向了电传飞控系统,如此便出现了许多新的设计特征,包括驾驶舱内侧杆技术、阵风缓解和颤振抑制等主动控制技术、飞行包线保护技术等,大量新技术的使用也给申请人开展适航符合性验证活动带来了诸多挑战,而如何制定匹配当前技术成熟度的民机电传系统的适航条款符合性验证路径也是当前研究的热点。
4 结束语
本文简要叙述了现代民机飞控系统的主要功能及构成,并分析了国内外主流民机的飞控系统架构,意图通过分析不同型号飞机的飞控系统组成以及各自的特点总结出现代民机飞控系统架构设计中共有的设计特征。随着人工智能技术、先进控制理论、微电子集成电路等技术的迅猛发展,现代民机飞控系统也在向着系统重量进一步降低、功能更强大、性能更优的方向不断优化。目前广泛使用的电传飞控系统也存在着一些弱点:首先,设计本身存在高增益的问题,而高增益很容易诱发振荡;其次,电信号在传输过程中容易受到电磁干扰;再者,为保证电传系统的可靠性,设计通常都会采用余度技术及自检测技术,这两种技术的引入会使得系统的复杂度提高。而光传飞控系统为解决上述问题提供了一种思路,光传飞控系统是利用光导纤维数据传输技术,在飞控控制操纵器件、飞行控制计算机和飞行控制伺服作动器之间传输控制指令和传感器信号,用以代替电传飞控系统。光传飞控系统相比电传飞控系统可以有效防止电磁干扰,此外,光传飞控系统也具有良好的抗腐蚀性和优良的故障隔离能力。目前,光传飞控系统已经应用于国外的军机型号中,后续,在其技术的安全性和可靠性水平进一步提高后,可以作为先进民机飞控的重要发展方向。
[参考文献]
[1] 张新慧.大型民用飞机飞行控制系统架构发展趋势[J].航空兵器,2020,27(6):13-18.
[2] 张汝麟,宋科璞.现代飞机飞行控制系统工程[M].上海:上海交通大学出版社,2015.
[3] 欧旭坡,朱亮,徐东光.民机飞控系统适航性设计与验证[M].上海:上海交通大学出版社,2015.
[4] 高金源,冯华南.民用飞机飞行控制系统[M].北京:北京航空航天大学出版社,2017.
[5] 王永.民机电传飞行控制系统体系结构研究[C]//大型飞机关键技术高层论坛暨中国航空学会2007年学术年会论文集,2007:2225-2234.
[6] 严雅琳.民用飞机电传飞控系统浅析[J].民用飞机设计与研究,2010(2):35-36.
[7] 尧伟文,曹云峰,庄丽葵.一种基于模型开发飞控系统的方法[J].计算机与数字工程,2017,45(2):351-354.
[8] 李桂领.基于形式化方法的软件代码安全性验证技术[D].北京:北京交通大学,2015.
[9] 王旻.民机电传飞控系统适航要求与符合性方法研究[J].中国民航大学学报,2015,33(4):16-19.
收稿日期:2024-05-27
作者简介:管庭筠(1992—),男,上海人,系统工程师,主要从事飞行控制系统设计验证工作。
