基于SRCKF的路面附着系数估计
2024-10-11 00:00:00刘艺霖张友兵周奎
湖北汽车工业学院学报 2024年3期
关键词:仿真
摘 "要:搭建了基于Dugoff轮胎模型的七自由度四轮独立驱动电动车辆模型,基于平方根容积卡尔曼滤波(SRCKF)算法设计了路面附着系数估计器。利用Simulink与Carsim的联合仿真平台对路面附着系数进行估计,与传统容积卡尔曼滤波算法估计结果进行对比。结果表明:SRCKF算法提高了滤波的稳定性和实时估计精度。
关键词:平方根容积卡尔曼滤波;路面附着系数;仿真;Dugoff轮胎
中图分类号:U461.5+1;TP391.9 " " " " " 文献标识码:A 文章编号:1008-5483(2024)03-0022-05
SRCKF-based Pavement Adhesion Coefficient Estimation
Liu Yilin, Zhang Youbing, Zhou Kui
(School of Automotive Engineers, Hubei University of Automotive Technology, Shiyan 442002, China)
Abstract: A seven-degree-of-freedom electric vehicle model driven by independent four wheels based on the Dugoff tire model was constructed, and a pavement adhesion coefficient estimator was designed based on the square root cubature Kalman filter (SRCKF) algorithm. The pavement adhesion coefficient was estimated using the joint simulation platform of Simulink and Carsim, and the results were compared with those of the traditional cubature Kalman filter algorithm. The experimental results show that the SRCKF algorithm enhances the stability of filtering and real-time estimation accuracy.
Key words: square root cubature Kalman filter; pavement adhesion coefficient; simulation; Dugoff tire
实现车辆主动安全控制的重要前提是获得实时、准确的路面附着系数。直接测量路面附着系数的专用传感器设备价格高昂,使用不便、安装环境苛刻,短时间难以普及[1-3]。近年来研究热点为基于相关理论与低成本车载传感器对路面附着系数进行准确、实时的估计[4-6]。常见的路面附着系数估计算法以无迹卡尔曼滤波(UKF)和扩展卡尔曼滤波(EKF)算法为主;为了解决估计过程中的非线性求解和发散的问题,容积卡尔曼滤波(CKF)也得到广泛应用[7]。文献[8]应用协方差匹配判据设计了自适应加权系数对预测协方差进行修正,采用次优Sage-Husa噪声估计器对过程噪声和测量噪声的均值与协方差进行调整,提高估计器的跟踪能力,但只有直线工况,没有考虑转向工况对估计器的影响。文献[9]采用IMM算法对车速和路面附着系数进行了估计。文献[10-11]使用双容积卡尔曼滤波分别估计了路面附着系数与车辆行驶状态,两者交互形成闭环,从而修正实时估计结果。然而,路面附着系数估计需要先进行车辆状态估计,相较于单卡尔曼滤波器,实时性较差。文献[12]提出一种基于无迹卡尔曼滤波的改进算法,得到更精确的路面附着系数。随着技术的更迭,路面附着系数的研究对象逐步从传统燃料汽车转换为四轮独立驱动(4WD)电动车辆。4WD车辆由4个轮毂电机独立驱动,可以较好地获得路面附着系数[13-15],具有传动链短、结构紧凑、轮矩精确可测、驱动轮独立可控的实用优点[16-18]。文中选取4WD电动车辆作为研究对象,在Simulink与Carsim联合仿真平台上搭建车辆模型,研究基于SRCKF的路面附着系数估计算法,解决了误差协方差平方根矩阵的非正定性问题,将SVD分解代替Cholesky分解。通过对接路面、加速双移线工况和蛇形工况下的联合仿真,对估计算法的可行性进行了验证。
1 车辆估计模型
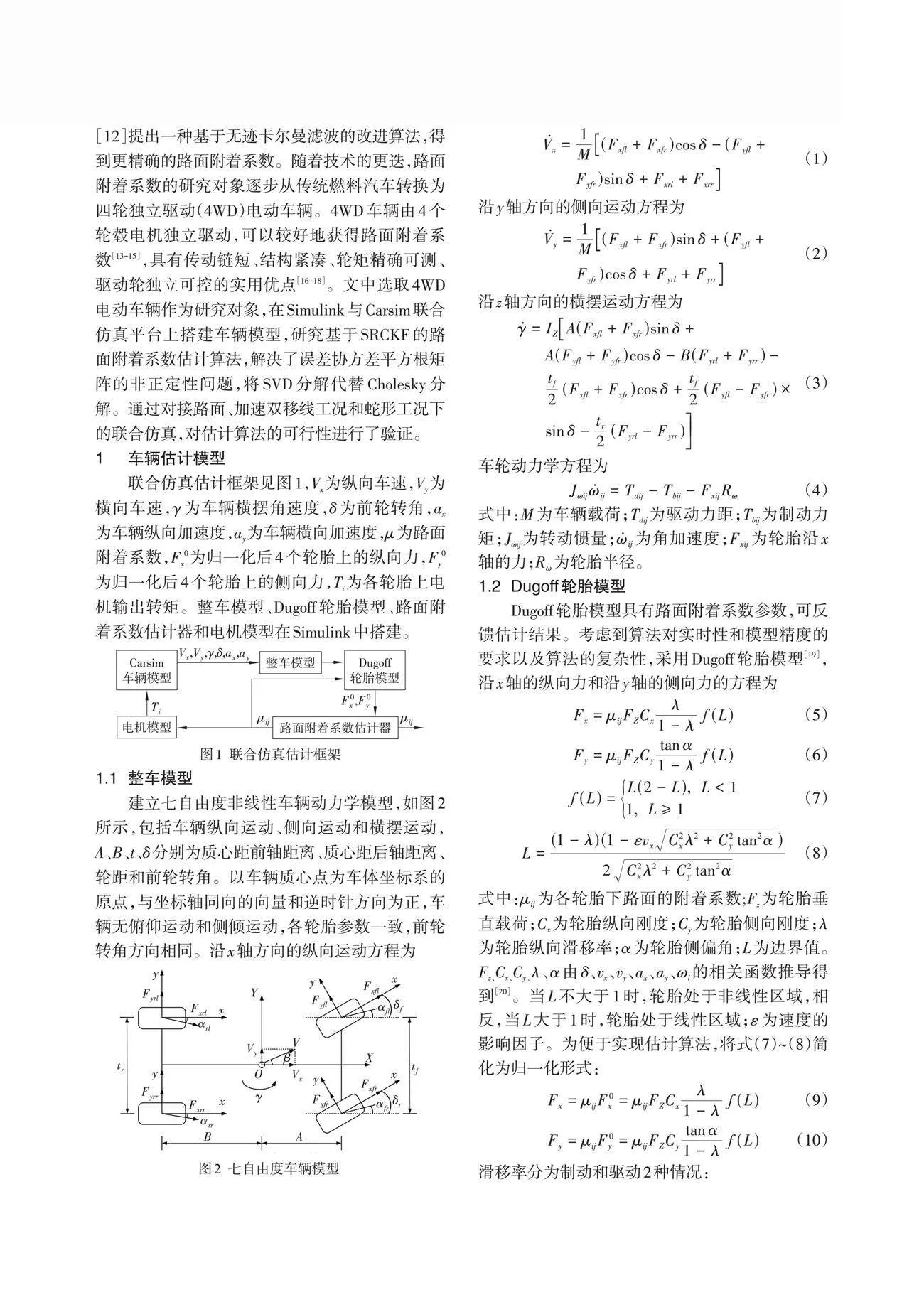
联合仿真估计框架见图1,Vx为纵向车速,Vy为横向车速,γ为车辆横摆角速度,δ为前轮转角,ax为车辆纵向加速度,ay为车辆横向加速度,μ为路面附着系数,Fx0为归一化后4个轮胎上的纵向力,Fy0为归一化后4个轮胎上的侧向力,Ti为各轮胎上电机输出转矩。整车模型、Dugoff轮胎模型、路面附着系数估计器和电机模型在Simulink中搭建。
1.1 整车模型
建立七自由度非线性车辆动力学模型,如图2所示,包括车辆纵向运动、侧向运动和横摆运动,A、B、t、δ分别为质心距前轴距离、质心距后轴距离、轮距和前轮转角。以车辆质心点为车体坐标系的原点,与坐标轴同向的向量和逆时针方向为正,车辆无俯仰运动和侧倾运动,各轮胎参数一致,前轮转角方向相同。沿x轴方向的纵向运动方程为
[Vx=1M(Fxfl+Fxfr)cos δ-(Fyfl+Fyfr)sin δ+Fxrl+Fxrr] (1)
沿y轴方向的侧向运动方程为
[Vy=1M(Fxfl+Fxfr)sin δ+(Fyfl+Fyfr)cos δ+Fyrl+Fyrr] (2)
沿z轴方向的横摆运动方程为
[γ=IZA(Fxfl+Fxfr)sin δ+A(Fyfl+Fyfr)cos δ-B(Fyrl+Fyrr)-tf2(Fxfl+Fxfr)cos δ+tf2(Fyfl-Fyfr)×sin δ-tr2(Fyrl-Fyrr)] (3)
车轮动力学方程为
[Jωijωij=Tdij-Tbij-FxijRω] (4)
式中:[M]为车辆载荷;Tdij为驱动力距;Tbij为制动力矩;Jωij为转动惯量;[ωij]为角加速度;[Fxij]为轮胎沿x轴的力;[Rω]为轮胎半径。
1.2 Dugoff轮胎模型
Dugoff轮胎模型具有路面附着系数参数,可反馈估计结果。考虑到算法对实时性和模型精度的要求以及算法的复杂性,采用Dugoff轮胎模型[19],沿x轴的纵向力和沿y轴的侧向力的方程为
[Fx=μijFZCxλ1-λf(L)] (5)
[Fy=μijFZCytanα1-λf(L)] (6)
[f(L)=L(2-L), " Llt;11, " L≥1] (7)
[L=(1-λ)(1-εvxC2xλ2+C2ytan2α)2C2xλ2+C2ytan2α] (8)
式中:[μij]为各轮胎下路面的附着系数;Fz为轮胎垂直载荷;Cx为轮胎纵向刚度;Cy为轮胎侧向刚度;λ为轮胎纵向滑移率;α为轮胎侧偏角;L为边界值。Fz、Cx、Cy、λ、α由δ、vx、vy、ax、ay、ωi的相关函数推导得到[20]。当L不大于1时,轮胎处于非线性区域,相反,当L大于1时,轮胎处于线性区域;ε为速度的影响因子。为便于实现估计算法,将式(7)~(8)简化为归一化形式:
[Fx=μijF0x=μijFZCxλ1-λf(L)] (9)
[Fy=μijF0y=μijFZCytanα1-λf(L)] (10)
滑移率分为制动和驱动2种情况:
[λ制动=Rω-vv=Rωv-1lt;0] (11)
[λ驱动=Rω-vRω=1-vRωgt;0] (12)
式中:v为车轮接地点速度;ω为车轮旋转角速度。
1.3 电机模型
以东风悦享的Sharing-VAN2.0中使用的永磁无刷轮毂电机为参考对象搭建电机模型,参数如表1所示。鉴于永磁无刷轮毂电机的高速响应特性,将转矩传递模型简化为一个二阶传递系统,电机的目标电磁转矩与实际电磁转矩的关系为
[TdTe=12ξ2s2+2ξs+1] (13)
式中:Te为目标转矩;Td为实际驱动转矩;s为拉普拉斯变换算子;ξ为由电机内部参数决定的参数。
2 SRCKF算法设计
2.1 估计器
系统方程观测变量、状态变量、估计器输入为
[y=ax, ay, γT, " x=μfl, μfr, μrl, μrrTu=δ, Foxij, FoyijT] (14)
考虑到系统噪声向量v(t)和过程噪声向量w(t)对估计的影响,得到:
[x(t)=f(x(t), " u(t))+w(t)y(t)=h(x(t), " u(t))+v(t)] (15)
将式(15)中的状态方程改写成矩阵形式:
[x(t)=I4x+w(t)] (16)
将式(15)中的观测方程改写成矩阵形式:
以[Δt]作为采样时间,将式(15)进行离散化处理:
[xk+1=f(xk,uk)+wk, " yk=h(xk,uk)+vk] (18)
式中:xk+1为(k+1)时刻的状态;yk为k时刻的输出;wk为k时刻的过程噪声;uk为k时刻的控制输入、vk为k时刻的观测噪声。vk和wk均为高斯白噪声,噪声特性为
[E(wk)=qk, " E(vk)=rkE[(wk-qk)(wk-qk)T]=Qkδk] (19)
式中:E为求解数学期望;δk为克罗内函数;rk为k时刻系统噪声的均值;qk和Qk为k时刻过程噪声的均值矩阵和协方差矩阵。
2.2 SRCKF算法
三阶容积准则中基于Cubature点的基本容积点[ξj]及对应权重[ωj]为
[ξj=m210,01,-10,0-1jωj=1m, " j=1,2,…,m, " m=2nx] (20)
式中:m为Cubature点的总数。如果(k-1)时刻状态估计的后验概率分布为p(xk+1|z1:k-1)~N(xk-1;xk-1,Pk-1),对于求解协方差矩阵时出现奇异值而导致矩阵非正定的问题,采用SVD分解代替SRCKF中的Cholesky分解来解决,即
[Sk-1=SVDPk-1] (21)
SRCKF算法步骤如下:
1)时间更新 计算状态Cubature点:
[Xj, k-1=Sk-1ξj+xk-1] (22)
计算状态方程传播得到的Cubature点:
[X*j, k=f(Xj, k-1)] (23)
计算k时刻的状态量预测值和误差协方差矩阵的平方根:
[xk=mi=1ωiX*j, k, " Sk=Tria[X*kSQ, k-1]SQ,K-1=SVD(QK-1)X*k=X*1,k-xkmX*2,k-xkm…X*m,k-xkm] (24)
式中:Tria为三角分解;Sk为下三角阵。
2)测量更新 重新计算Cubature点:
[Xj,k=Skξj+xk] (25)
更新通过测量方程传播得到的Cubature点:
[Zj,k=h(Xj,k)] (26)
进行k时刻的测量预测,计算预测误差协方差的平方根和协方差:
[zk=mi=1ωiZj.k] (27)
[Szz,k=Tria(γkSR,k), " Pxz,k|k-1=xkγTk] (28)
[γk=Z1,k-zkmZ2,k-zkm…Zm,k-zkmxk=X1,k-xkmX2,k-xkm…Xm,k-xkm] (29)
计算滤波增益矩阵
[Wk=(Pxz,k/STzz,k)/Szz,k] (30)
计算k时刻的最优状态估计和协方差的平方根
[xk=xk+Wk(zk-zk)Sk=Tria(xk-WkγkWkSR,k)] (31)
3 仿真验证与分析
运用Simulink与Carsim进行联合仿真,验证SRCKF算法的可行性。设计不同路面附着系数和不同运动工况的试验,得到实时的估计结果。分别计算SRCKF的估计结果、CKF的估计结果与Carsim设定值的最大误差和平均绝对百分比误差,并进行对比分析。选用东风悦享自主设计研发的Sharing-VAN2.0四轮独立驱动车型,相关参数见表2,在Carsim中设置相应车型。
3.1 对接路面
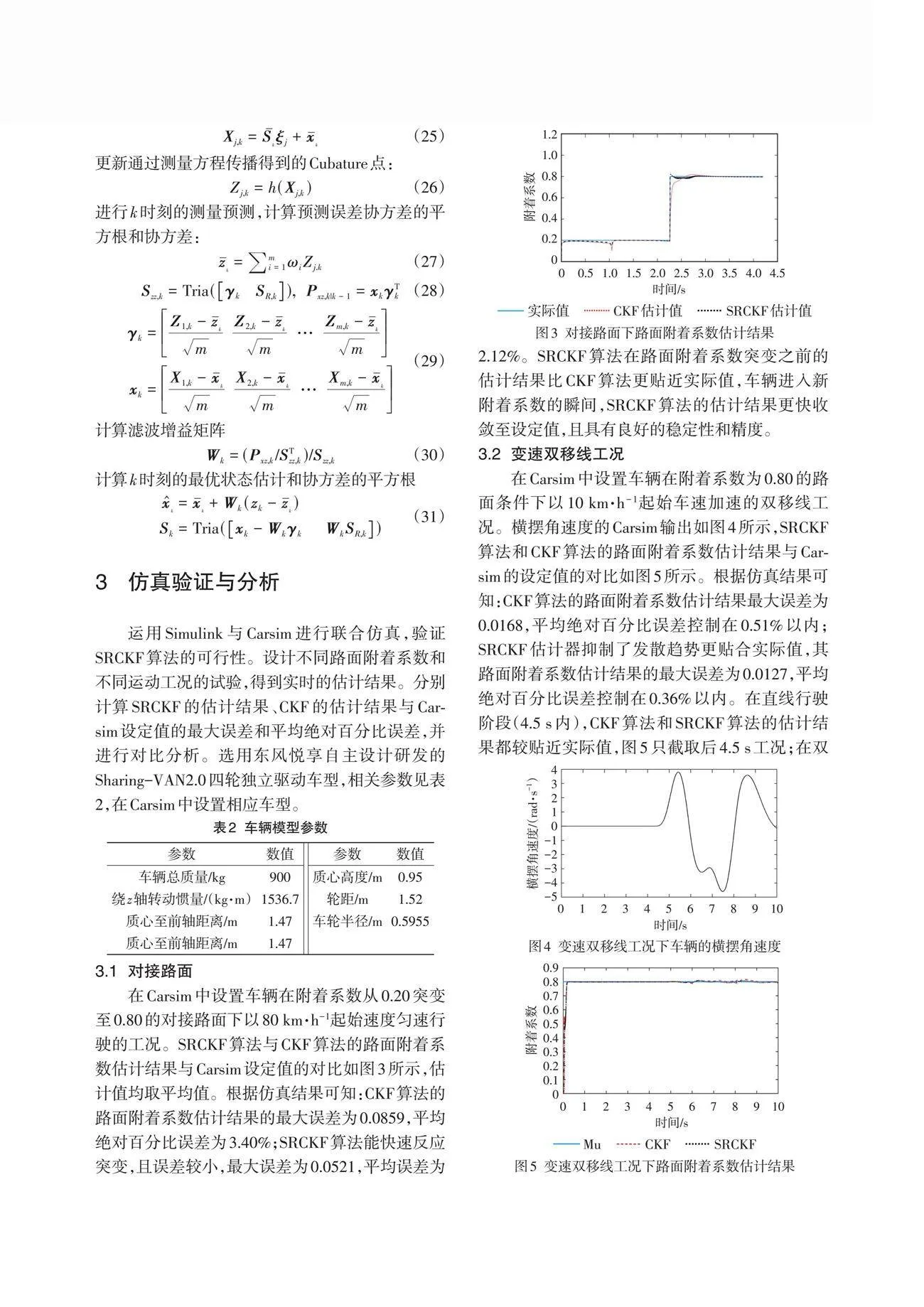
在Carsim中设置车辆在附着系数从0.20突变至0.80的对接路面下以80 km·h⁻¹起始速度匀速行驶的工况。SRCKF算法与CKF算法的路面附着系数估计结果与Carsim设定值的对比如图3所示,估计值均取平均值。根据仿真结果可知:CKF算法的路面附着系数估计结果的最大误差为0.0859,平均绝对百分比误差为3.40%;SRCKF算法能快速反应突变,且误差较小,最大误差为0.0521,平均误差为2.12%。SRCKF算法在路面附着系数突变之前的估计结果比CKF算法更贴近实际值,车辆进入新附着系数的瞬间,SRCKF算法的估计结果更快收敛至设定值,且具有良好的稳定性和精度。
3.2 变速双移线工况
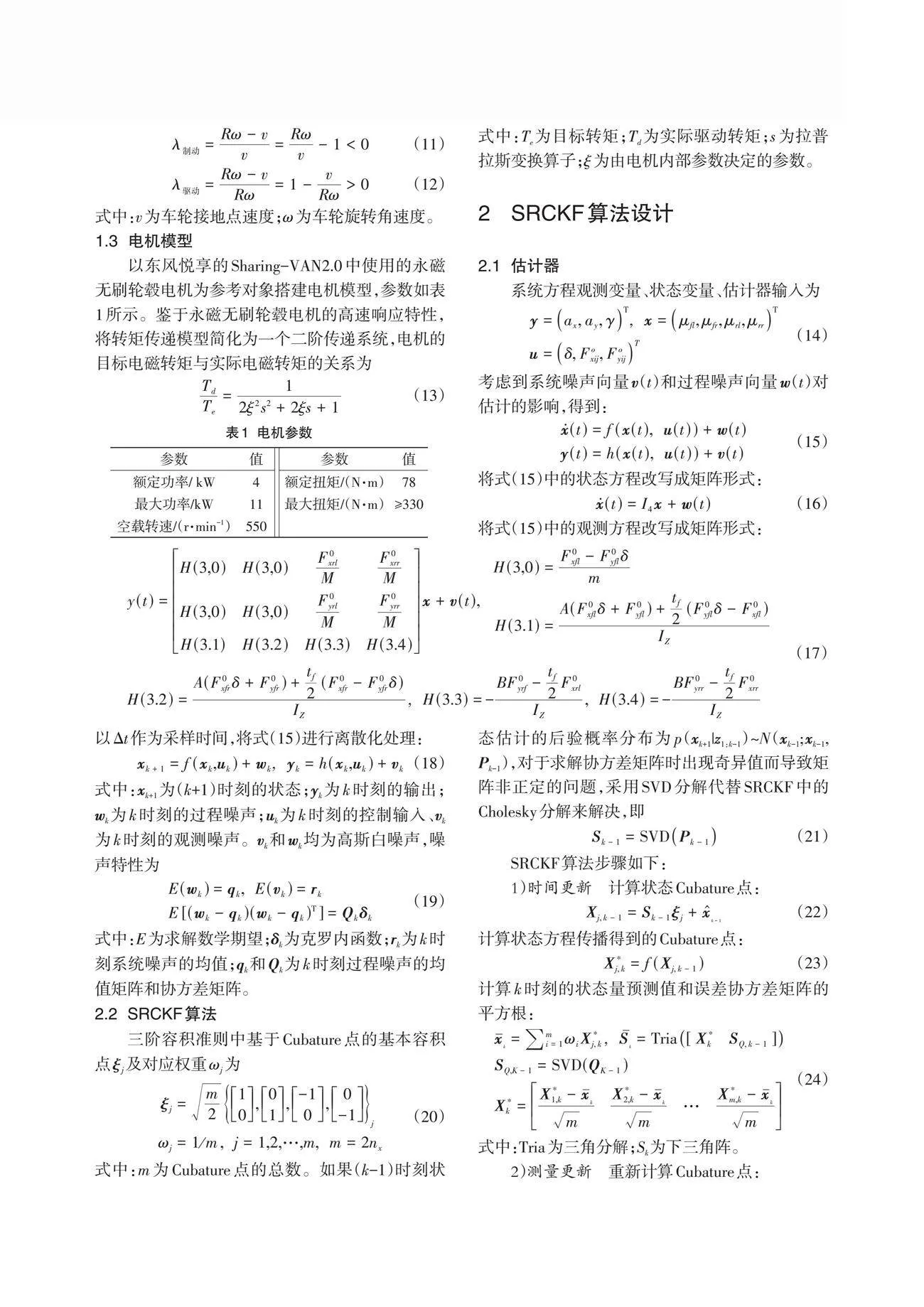
在Carsim中设置车辆在附着系数为0.80的路面条件下以10 km·h⁻¹起始车速加速的双移线工况。横摆角速度的Carsim输出如图4所示,SRCKF算法和CKF算法的路面附着系数估计结果与Carsim的设定值的对比如图5所示。根据仿真结果可知:CKF算法的路面附着系数估计结果最大误差为0.0168,平均绝对百分比误差控制在0.51%以内;SRCKF估计器抑制了发散趋势更贴合实际值,其路面附着系数估计结果的最大误差为0.0127,平均绝对百分比误差控制在0.36%以内。在直线行驶阶段(4.5 s内),CKF算法和SRCKF算法的估计结果都较贴近实际值,图5只截取后4.5 s工况;在双移线工况阶段,车辆处于非线性区域,SRCKF算法的估计结果比CKF算法的估计结果波动更小,更贴近实际值。
3.3 蛇形工况
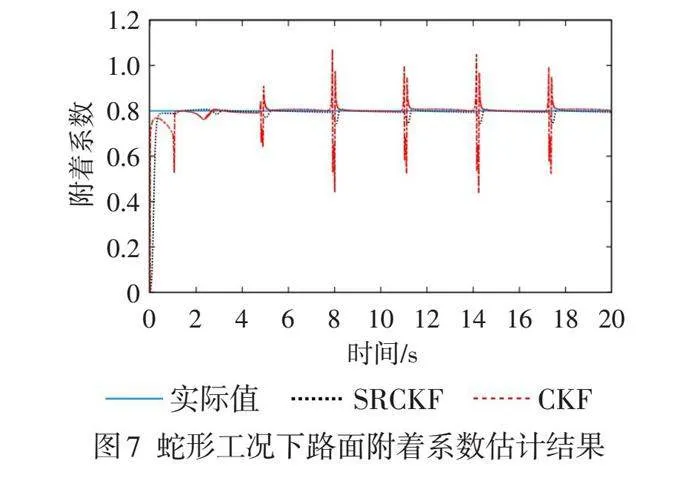
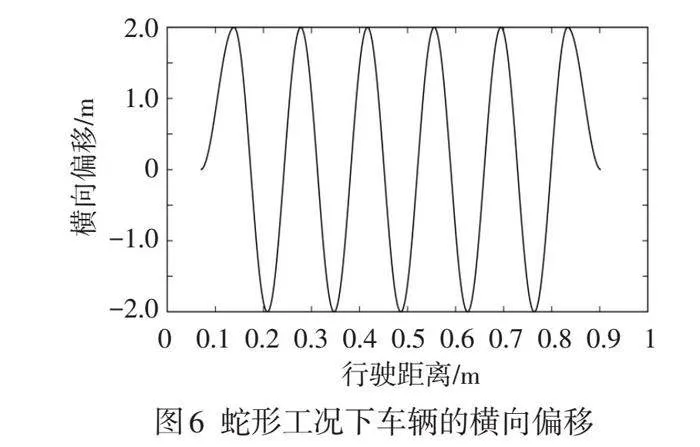
在Carsim中设置车辆在附着系数为0.80的路面条件下以80 km·h⁻¹起始速度匀速行驶的蛇形工况。图6为横向偏移的设定值,SRCKF算法和CKF算法的路面附着系数估计结果对比如图7所示。根据仿真结果可知:CKF算法的路面附着系数估计结果的最大误差为0.3614,平均绝对百分比误差为1.83%;SRCKF算法的路面附着系数估计结果的最大误差为0.0567,平均绝对百分比误差为0.76%。CKF算法的估计结果波动较大,SRCKF算法的估计误差更小,算法更稳定。
4 结论
基于Dugoff轮胎模型搭建了七自由度车辆估计模型,基于SRCKF理论设计了路面附着系数估计器,为解决误差协方差平方根矩阵的非正定性问题,采用SVD分解代替Cholesky分解。基于Carsim与Simulink联合仿真平台设计了对接路面工况、变速双移线工况和蛇形工况,对SRCKF算法进行验证,同时与CKF算法进行了对比分析。仿真结果表明:SRCKF算法表现出更高的估计精度和更快的收敛速度,同时还具备更强的抗干扰和自适应能力,估计结果的误差显著小于CKF算法,能够适应于不同路面、不同工况的实时估计。
参考文献:
[1] "Han K S,Lee E,Choi S. Estimation of the Maximum Lateral Tire-road Friction Coefficient Using the 6-DOF Sensor[C]//2015 15th International Conference on Control,Automation and Systems (ICCAS). IEEE,2015:1734-1738.
[2] "Khaleghian S,Emami A,Taheri S. A Technical Survey on Tire-road Friction Estimation[J]. Friction,2017,5(2):123-146.
[3] "Niskanen A,Tuononen A. Three Three-axis IEPE Accelerometers on the Inner Liner of a Tire for Finding the Tire-road Friction Potential Indicators[J]. Sensors,2015,15(8):19251-19263.
[4] "李亮,朱宏军,陈杰,等. 用于汽车稳定性控制的路面附着识别算法[J]. 机械工程学报,2014,50(2):132-138.
[5] "杨秀芳,张新,常桂秀,等. 汽车主动安全技术的发展现状及趋势[J]. 重庆工学院学报(自然科学版),2008,22(4):15-17.
[6] "Guan H,Wang B,Lu P P,et al. Identification of Maximum Road Friction Coefficient and Optimal Slip Ratio Based on Road Type Recognition[J]. Chinese Journal of Mechanical Engineering,2014,27(5):1018-1026.
[7] "Arasaratnam I,Haykin S,Hurd T R. Cubature Kalman Filtering for Continuous-discrete Systems:Theory and Simulations[J]. IEEE Transactions on Signal Processing,2010,58(10):4977-4993.
[8] "刘志强,刘逸群. 路面附着系数的自适应衰减卡尔曼滤波估计[J]. 中国公路学报,2020,33(7):176-185.
[9] "Tsunashima H,Murakami M,Miyataa J. Vehicle and Road State Estimation Using Interacting Multiple Model Approach[J]. Vehicle System Dynamics,2006,44(sup1):750-758.
[10] "李刚,解瑞春,卫绍元,等. 基于双容积卡尔曼滤波的车辆状态与路面附着系数估计[J]. 中国科学:技术科学,2015,45(4):403-414.
[11] "樊东升,李刚,王野. 分布式电动汽车行驶状态与路面附着系数估计[J]. 重庆理工大学学报(自然科学),2020,34(6):69-76.
[12] "付翔,孙威,黄斌,等. 基于指数加权衰减记忆无迹卡尔曼滤波的路面附着系数估计[J]. 汽车技术,2018(1):31-37.
[13] "李刚,宗长富. 四轮独立驱动轮毂电机电动汽车研究综述[J]. 辽宁工业大学学报(自然科学版),2014,34(1):47-52.
[14] "靳彪,张欣,彭之川,等. 四轮轮毂电机驱动电动汽车建模与仿真[J]. 中国公路学报,2016(4):138-144.
[15] "Jin B,Sun C Y,Zhang X. Research on Lateral Stability of Four Hubmotor-in-wheels Drive Electric Vehicle[J]. International Journal on Smart Sensing and Intelligent Systems,2015,8(3):1855-1875.
[16] "余卓平,刘军,熊璐,等. 分布式驱动电动汽车操纵性改善控制策略设计[J]. 同济大学学报(自然科学版),2014,42(7):1088-1095.
[17] "Zhang X D,Göhlich D. Integrated Traction Control Strategy for Distributed Drive Electric Vehicles with Improvement of Economy and Longitudinal Driving Stability[J]. Energies,2017,10(1):126.
[18] "张利鹏,李亮,祁炳楠,等. 双电机分布式驱动汽车高速稳定性机电耦合控制[J]. 机械工程学报,2015,51(16):29-40.
[19] "Dugoff H,Fancher P S,Segel L. An Analysis of Tire Traction Properties and Their Influence on Vehicle Dynamic Performance[C/OL]//SAE Technical Paper Series. 400 Commonwealth Drive,Warrendale,PA,United States:SAE International,1970:700377.
[20] "Manning.Vehicle Handling Dynamics[M]. Oxford:Butterworth-Heinemann/Elsevier,2009.
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12 10:09:15
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 20:57:34
科技资讯(2016年18期)2016-11-15 20:09:22
科技资讯(2016年18期)2016-11-15 07:55:28
价值工程(2016年29期)2016-11-14 02:01:16
电子技术与软件工程(2016年18期)2016-11-14 00:46:54
数字技术与应用(2016年9期)2016-11-09 23:25:33
数字技术与应用(2016年9期)2016-11-09 22:09:07
科技视界(2016年18期)2016-11-03 21:44:44
科技视界(2016年18期)2016-11-03 20:31:49