
基于多传感器融合的图像识别与目标检测研究
2024-10-01 00:00:00赵金剑刘蓓蕾赵勇
无线互联科技 2024年18期




摘要:随着科技的飞速发展,智能设备在导航、自动驾驶、安全监控等领域的应用日益广泛,但单个传感器往往难以应对复杂多变的环境条件,多传感器信息融合技术应运而生,成为提高目标检测准确性和鲁棒性的关键手段。为优化图像识别和目标检测技术,文章主要分析了多传感器融合技术在图像识别与目标检测中的优化应用方案,通过整合不同的传感器信息,提出一种改进的多传感器融合算法,以增进目标检测准确性和鲁棒性。研究结果表明,在图像识别与目标检测中融合多传感器可显著增进目标检测的效率与精度,尤其可高效应对动态环境和复杂环境。
关键词:多传感器融合;图像识别;目标检测;神经网络;准确性
中图分类号:TP212 文献标志码:A文献标志码
0 引言
基于科学技术飞速发展的时代背景,智能系统在设计与开发期间,已经逐渐引进并深度应用图像识别与目标检测技术[1]。但是,在当前大多数的智能系统中,其应用的传感器设备存在单一性,并且在面对复杂环境的影响时,也普遍难以精确检测,从而降低了获取信息的精准度。多传感器融合技术的出现,为优化改进智能系统图像识别与目标检测提供了新思路。本文旨在整合红外传感器与可见光传感器的信息,提出一种改进的多传感器融合算法,以期在动态和复杂环境中实现更准确、更稳定的目标检测。为此,本文深入研究神经网络集成在传感器信息融合中的应用,设计特征提取与融合策略,并优化融合后的目标检测算法。在研究方法上,以神经网络集成技术作为基础,并联式结构实现多传感器图像识别与目标检测的集成。重点关注特征提取的重要性,并针对红外传感器和可见光传感器的特点,分别设计特征提取方法。在特征级融合策略上,采用特征归一化、加权平均融合和主成分分析等技术手段,以获得更全面、更鲁棒的特征表示。本文提出的多传感器融合算法能够有效整合不同传感器的优势,并显著提高目标检测的准确性和稳定性。此外,优化与改进融合后的目标检测算法,不仅精简了分支逻辑,而且能够消除重复运算和优化存储空间。本文一方面为多传感器融合技术的发展提供新的思路和方法,有望推动相关领域的技术进步;另一方面,优化后的目标检测算法可应用于各种智能系统中,提升其在复杂环境中的感知能力,从而提高系统的安全性和可靠性,既具有理论价值,又具有实践意义。
1 以神经网络集成为基础的传感器信息融合
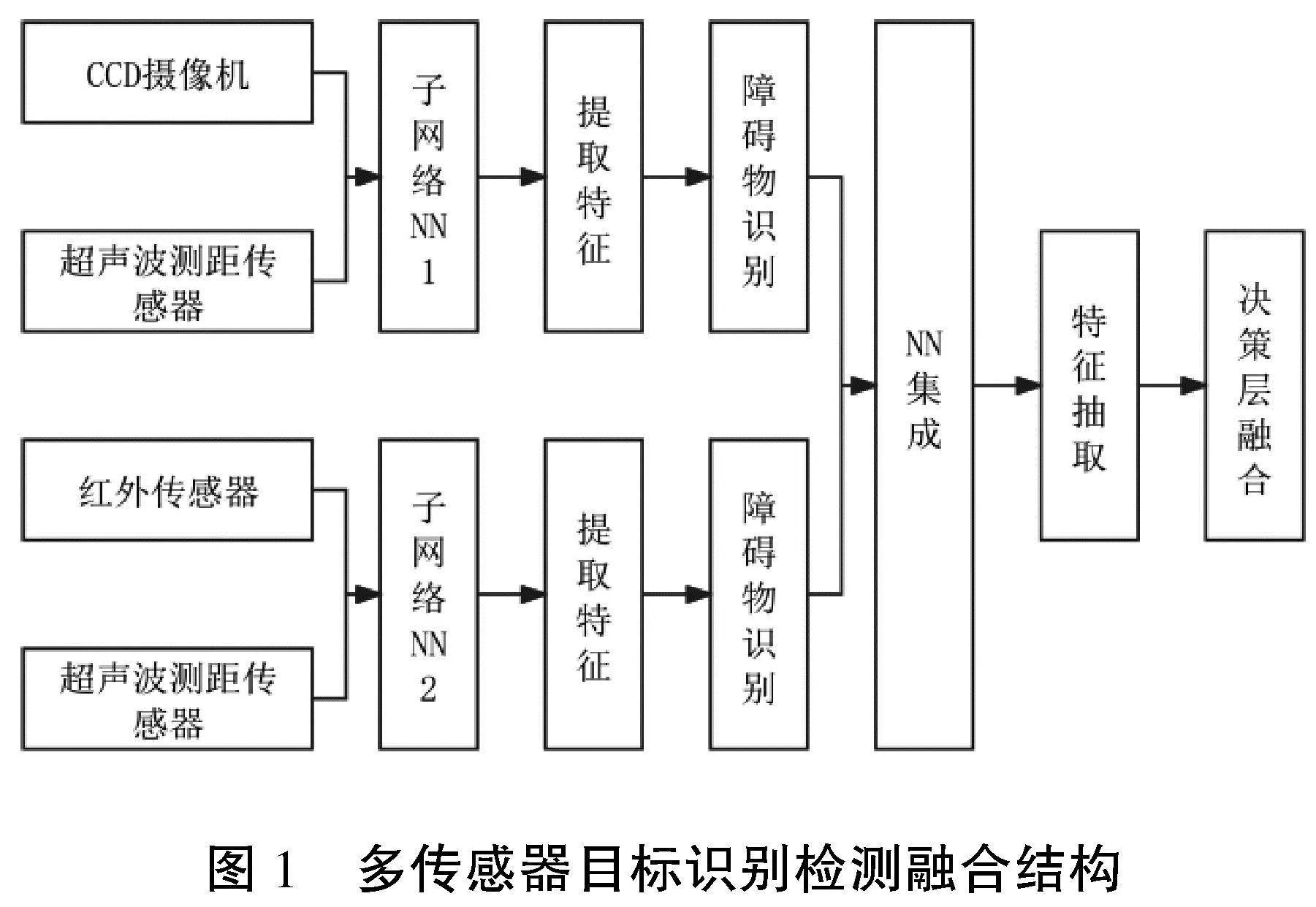
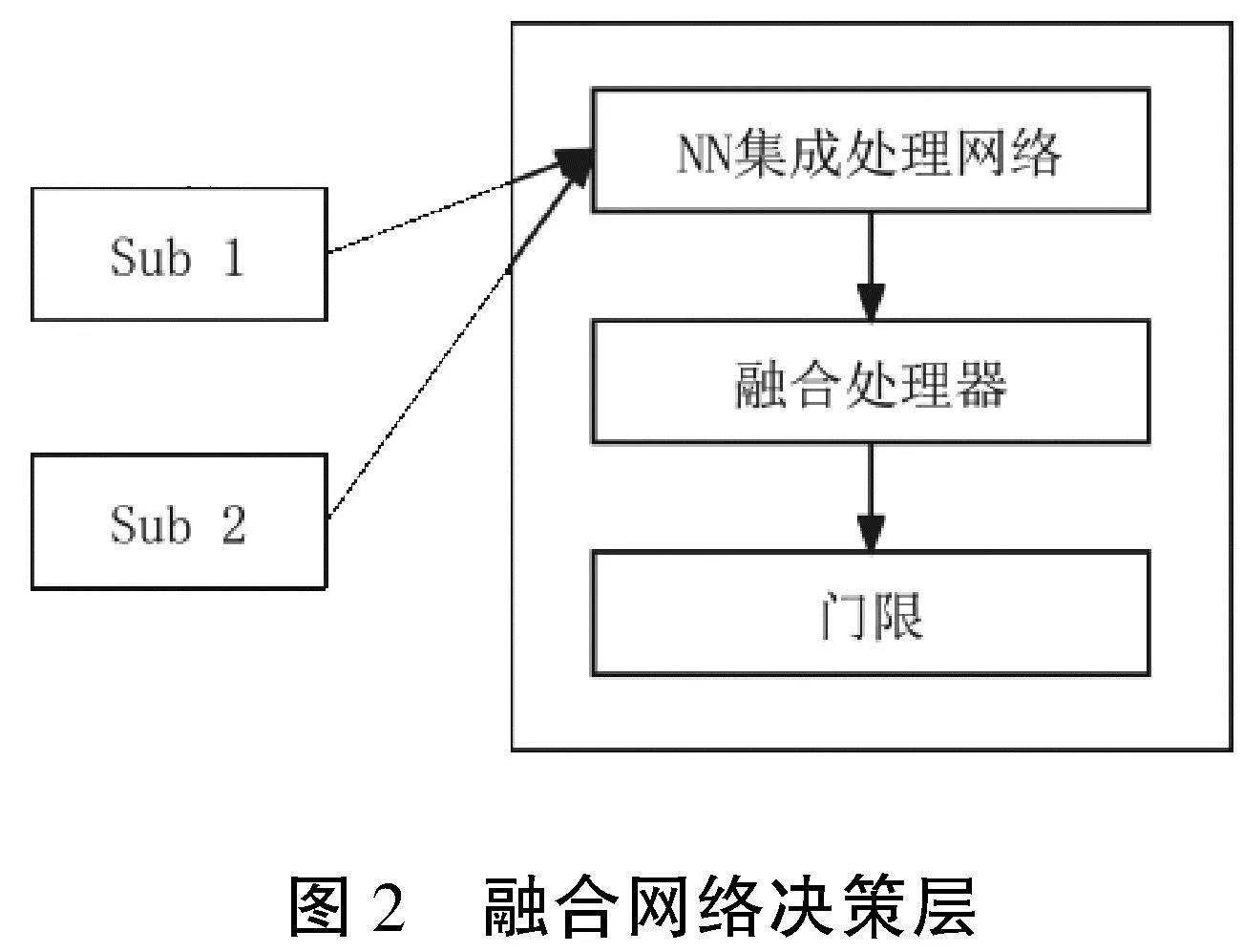
在智能设备导航环节中,图像识别与目标检测是正确识别障碍物并作出合理规避的技术基础,也是关键组成单元。一般情况下,智能设备多传感器信息融合可划分为低级融合和高级融合2种类型,其中,低级融合实质是直接集成多种传感器数据,完成参数和状态估计[2]。但是,在实际应用期间,参数和状态的估计结果可在规划路径和机构执行环节产生作用,形成控制智能设备行动的控制信号和命令。高级融合主要是指在相同层次的结构中,分配或者集成不同模块提供的信号,从而间接融合传感器数据。基于行为的结构和神经网络的统一框架等,这二者均是传感器信息融合的技术方案。而以神经网络技术作为技术基础的传感器信息融合,更可提升系统的识别精度,取得理想的识别检测效果[3]。多传感器目标识别检测融合结构如图1所示,融合网络决策层如图2所示。
多传感器图像识别与目标检测集成的结构为并联式,实质是所有不同的子系统在运行服务期间,都能独立接收原始图像,同时输出具体的识别和检测结果。在此之后,子系统仍旧独立地保持在识别结果之上获取答案。神经网络合成、贝叶斯法、投票法等都是集成的主要方法。在并联时,所有的分类器都处于相互独立设计的状态,在对其展开组合处理以后,全部的单一分类器结果将会以合适的方法综合起来,以获得最终的识别结果[4]。
2 特征提取与融合策略设计
2.1 特征提取的重要性及方法设计
图像识别与目标检测以提取特征作为核心,特征质量优劣与后续识别效率高低和准确性控制好坏之间有最为直接的关系。红外传感器特征提取需重点关注目标的热辐射特性,应以温度分布和变化率特征作为出发点展开。其中,平均温度特征要求对图像区域范围内的平均温度进行计算,对目标整体热辐射水平进行详细描述:
采用温度标准差对温度分布的均匀性情况进行表述,即:
在公式(2)中,σT为温度的标准差。
为增进温度检测的准确度,还应结合温度变化率特征描述目标温度随时间变化的速率:
在公式(3)中,Tt+1和Tt均为临近2个时间节点的平均温度;Δt则为时间间隔。
对于可见光摄像头而言,在特征提取时应注重其纹理、颜色、形状等视觉特征分析,并需要结合角点检测、边缘检测等图像处理技术,实现特征正确提取。颜色直方图特征用以描述颜色分布情况:
在公式(4)中,H(c)为颜色c在直方图中的值;nc是颜色c的像素数;N为总像素数。
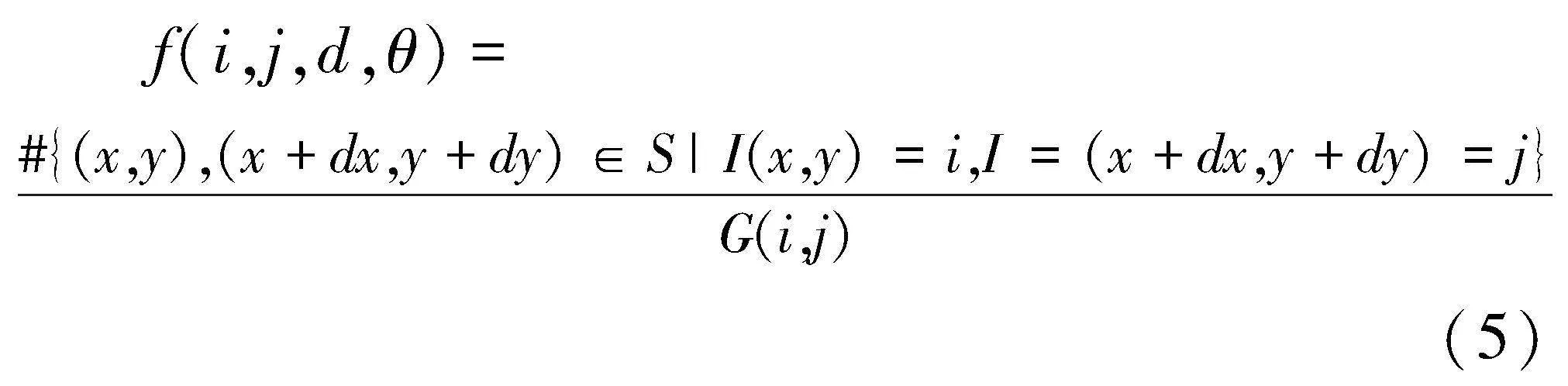
图像纹理信息如下:
在公式(5)中,f(i,j,d,θ)为灰度共生矩阵中的元素,代表给定距离d和给定方向θ之下,灰度级i和j共同出现的频率;S为图像的区域;I(x,y)为在(x,y)位置的灰度值;G(i,j)是归一化因子。
2.2 特征级融合策略
在多传感器融合中,特征级融合是重要的组成部分。本文采用特征级融合策略融合不同传感器提取的特征,以形成更加丰富和全面的目标描述[5]。其中,特征归一化的主要作用是消除不同传感器之间存在的量纲差异,关系表达如下:
在公式(6)中,x为原始特征值;min(x)为该特征的最小值;max(x)为该特征的最大值;x′为归一化后的特征值。
假设存在2个传感器的特征向量F1、F2,加权平均融合可表示为:
Ffused=αF1+(1-α)F2(7)
在公式(7)中,α为权重系数,介于0和1之间,主要作用是平衡2个特征向量贡献。
主成分分析是一种较为常见的降维技术手段,可对多个不同的特征展开统合处理。其主要目标是寻找新的坐标系统,其中,第一个坐标便是第一主成分,具有最大的方差;第二个坐标具有次大方差,以此类推。主成分分析的转换矩阵W可通过求解协方差矩阵C的特征向量获得:
在公式中,Xi为样本数据;X-为样本均值;φ为特征值;W为对应的特征向量。
通过特征级融合能够得到更加全面和鲁棒性的特征表示,特征级融合将多个传感器优势进行整合,显著增进了目标检测的准确性和稳定性。
3 融合后目标检测算法的实现
优化算法运行效率,需着重从精简分支逻辑、消除重复运算和优化存储空间3个关键策略着手。在算法设计的初期阶段,为强化其广泛适应性和测试方便,常设多个分支,但这会耗费系统资源,影响实时性。由此可见,在算法结构优化处理环节中,要合并冗余分支、设定固定值,最大限度地削减判断次数,为提升效率提供支持。再者,在重复运算环节,消除算法也尤为关键,提取公共函数、利用缓存等方式避免重复计算,减轻处理器负载。优化存储空间则要合理分配存储空间、减少内外存数据交换,并借助分布式存储和并行计算等云计算和大数据技术提升算法效率[6]。
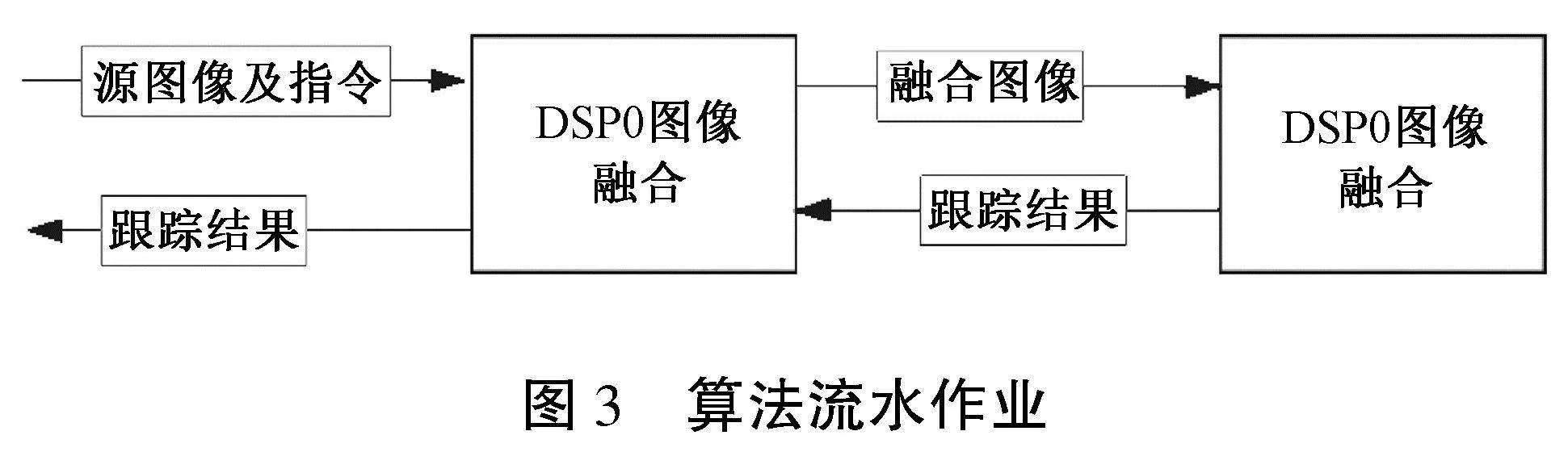
并行化处理算法时,要对硬件架构、软件环境及专门的并行算法展开综合考量。在具体操作中,选择应用双片8核DSP完成对图像的处理并支持多核与多片DSP并行操作的构建与处理。均衡分配任务以设计并行算法,从而最大化应用硬件资源。利用SRIO查询和硬件信号量交互方案构建高效的并行软件系统,同步与调度DSP间及核间,保障并行算法的正确与高效。结合任务级并行和数据级并行2种策 略实现并行算法目标,既分割算法任务又均匀分配数据,有效提升处理速度。具体实践中,在DSP0上进行图像融合的并行处理,在DSP1上进行目标跟踪的并行处理,高效流水线作业能显著缩短算法运行时间,提高系统实时性能[7-8]。算法流水作业如图3所示。
4 实验结果与分析
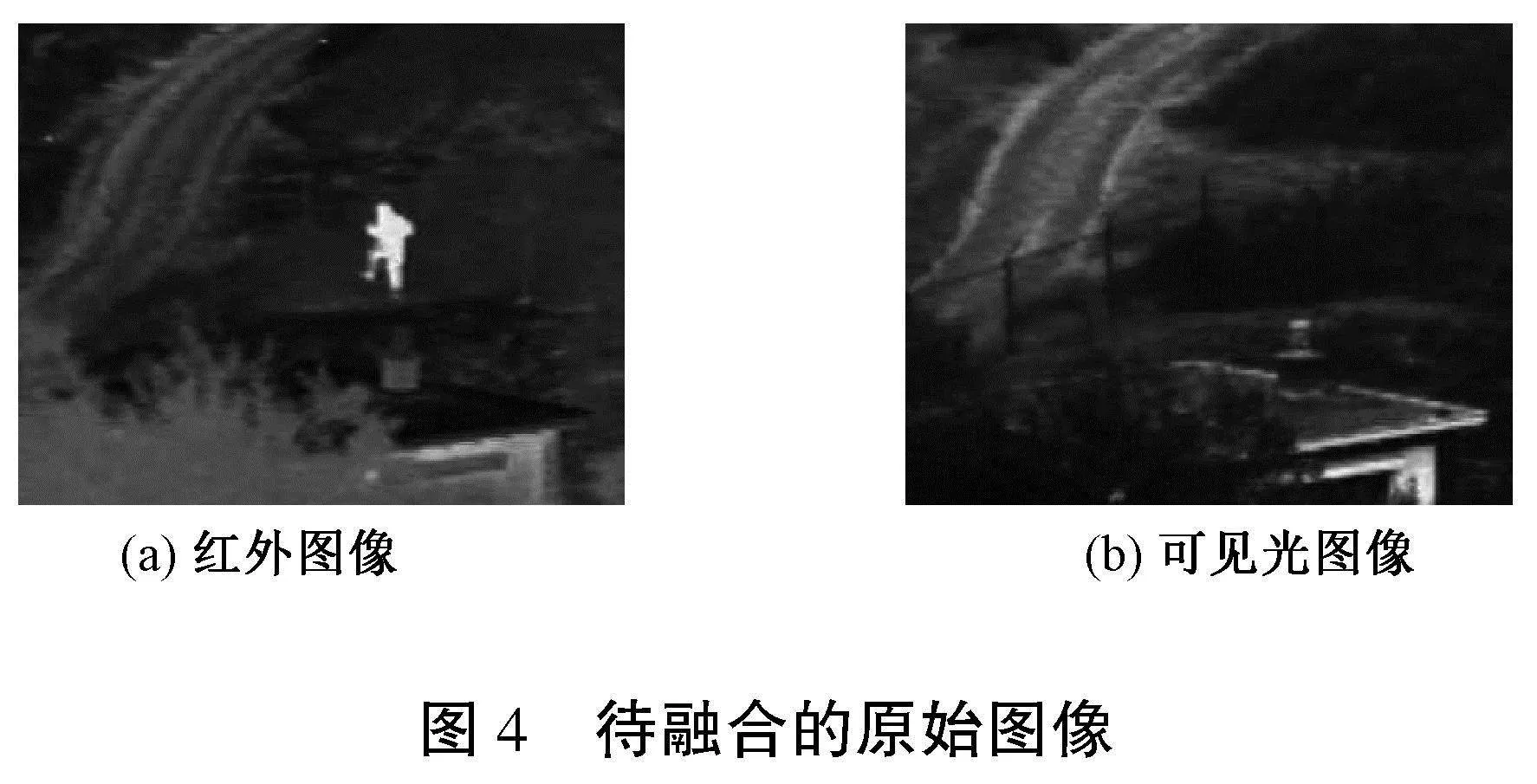
为验证本文图像融合算法的有效性,选取2幅代表性的720×576像素红外与可见光图像作为待融合图像,该图像包含丰富的场景信息和目标特征,以充分检验融合算法的性能,待融合的原始图像如图4所示。实验在Matlab环境和专业的图像处理单元中分别对这2幅图像进行融合处理。
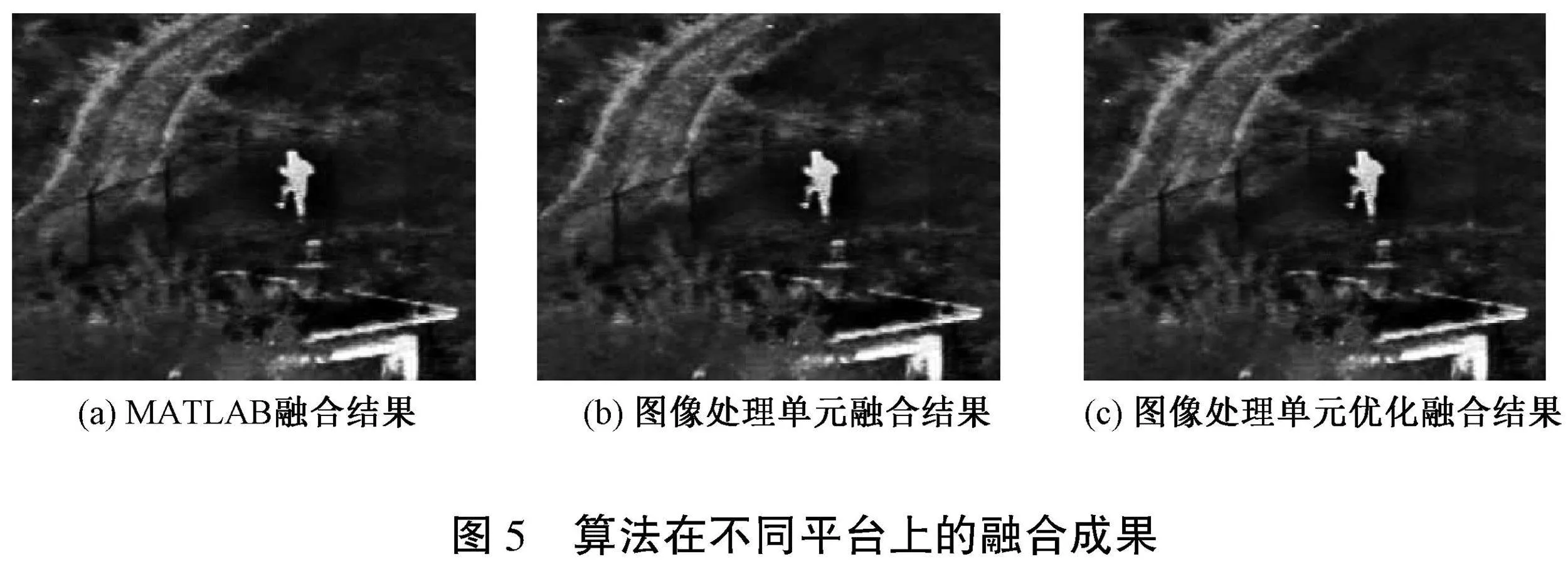
算法在不同平台上的融合成果如图5所示。实验结果表明,本文的图像融合算法在MATLAB环境和图像处理单元中均取得了良好的融合效果。融合后的图像保留了红外与可见光图像的重要信息,并在一定程度上提高了目标的可辨识度。此外,算法在实时性方面也表现优异,满足在20 ms内完成处理的要求。
5 结语
本文整合了红外与可见光传感器的信息,提出一种改进的多传感器融合算法,旨在提高目标检测的准确性和鲁棒性。研究在MATLAB环境和专业图像处理单元进行实验验证,结果显示融合后的图像不仅保留了原图像的信息,还增强了目标的辨识度。算法在实时性方面表现出色,满足了快速处理的需求,为图像识别与目标检测提供了新的技术路径,有望应用于动态和复杂环境中,提升智能系统的感知能力。根据实验结果的对比分析,本文进一步确认了多传感器融合技术在提升目标检测效率和精度方面有着显著效果,为相关领域的技术发展提供了理论支持和实践指导。
参考文献
[1]刘晋成,唐伦,陈前斌.基于数据特征的多传感器融合实时目标检测[J].计算机应用研究,2023(11):3456-3461.
[2]谢德胜,徐友春,陆峰,等.基于多传感器信息融合的3维目标实时检测[J].汽车工程,2022(3):340-349,339.
[3]宦克为,李向阳,曹宇彤,等.卷积神经网络结合NSST的红外与可见光图像融合[J].红外与激光工程,2022(3):512-519.
[4]何开星,蒋峥,刘斌,等.基于正交投影的快速高光谱图像异常检测[EB/OL].(2024-05-09)[2024-05-28].http://link.cnki.net/urlid/31.1690.TN.20240508.0954.072.
[5]黄兆基,高军礼,唐兆年,等.基于注意力机制和视触融合的机器人抓取滑动检测[J].信息与控制,2024(2):191-198.
[6]梁国龙,张博宇,齐滨,等.无源声呐水下多目标融合跟踪方法[J].声学学报,2024(3):501-512.
[7]崔光珍,孙启迪,肖艳秋,等.基于多传感器融合的城市道路目标检测方法[J].计算机仿真,2023(10):193-199.
[8]韩丹.自动驾驶中基于多传感器融合的目标检测分析[J].企业科技与发展,2024(1):95-97.
Research on image recognition and object detection based on multi sensor fusion
Abstract: With the rapid development of technology, the application of intelligent devices in navigation, autonomous driving, safety monitoring and other fields is becoming increasingly widespread. However, a single sensor often finds it difficult to cope with complex and changing environmental conditions. Multi sensor information fusion technology has emerged as a key means to improve the accuracy and robustness of target detection. In order to optimize image recognition and target detection technology, this paper mainly analyzes the optimal application scheme of multi sensor fusion technology in image recognition and target detection. By integrating different sensor information, an improved multi-sensor fusion algorithm is proposed to improve the accuracy and robustness of target detection. The research results indicate that integrating multiple sensors in image recognition and object detection can significantly improve the efficiency and accuracy of object detection, especially in dealing with dynamic and complex environments efficiently.
Key words: multi sensor fusion; image recognition; object detection; neural networks; accuracy
