基于物联网技术的数智公路护栏系统
2024-09-24 00:00:00叶芷艺李妙梅章可欣林宇洪
物联网技术 2024年5期
关键词:物联网

摘 要:针对频发的公路交通事故,提出了一种基于物联网技术的数智公路护栏系统。通过微时空主控站采集气象、事故、动物横穿公路等交通因子。通过增配碰撞传感器、雷视融合模组、雷热融合模组,检测各类交通事故并侦测横穿公路的大型动物。采用边缘计算架构,将微时空内的风险因子通过NB-IoT上传至云计算中心进行分析,护栏通过不同的颜色呈现路段的危险程度,实现对后方车辆的实时预警。采用环境俘能技术,利用向日葵式太阳能追光模组、垂直轴风力发电模组,解决了远距离低压供电的电能损失问题。该系统实现了对公路交通细颗粒度的精细化管理,减少交通事故的发生。
关键词:物联网;时空智能;微观管控;公路感知网络;事故预警;数智公路护栏系统
中图分类号:TP29;TN92 文献标识码:A 文章编号:2095-1302(2024)05-0-05
0 引 言
在传统公路管理下,一起随机交通事故易引发惨烈的连环追尾事故。恶劣天气下,驾驶员未能及时调整驾驶策略,也极易引发事故。在大型动物出没的热点区域,夜间行车易发生与动物相撞的惨烈事故。可采用智慧路侧感知技术侦察到交通风险因子的形成,云计算中心获得事故发生概率,通过变色交通标识,提前向车辆发出预警,将有效减少交通事故的发生。
2020年8月,交通部发布《交通运输部关于推动交通运输领域新型基础设施建设的指导意见》[1],要求推动公路感知网络的建设,实现全天候、多要素的状态感知。2022年2月,交通部发布《公路安全设施和交通秩序管理精细化提升行动方案》[2],强调精细提升公路的安全防护能力,加强对恶劣天气的动态管控。2022年10月,党的二十大报告指出,推动经济社会发展绿色化、低碳化是实现高质量发展的关键环节。
智慧公路的建设与发展最早始于20世纪90年代的欧洲。近年来,在防止两车相撞方面,Gokulakrishnan等人[3]提出了一种名为道路事故预警(RAP)的路由方案,该方案引入了早期预警(EW)消息,以便做出重要决策—如何选择替代路线、减速车辆和改变车道;为了预测极端天气引发的交通事故,Hasan[4]利用分类树法分析交通参数如何诱发道路危险情况,提前分析交通参数中极端气候的因素;面对在高速公路上基础设施供电难的问题,Amjadian[5]提出用电磁能量采集器(EMEH)给负责交通基础设施电能清除和结构健康监测的常规传感器供电;面对已发生的交通事故,徐勤亚等人[6]提出一种交通事故应急救援系统,该系统基于云端实时监控的概念开发,车辆发生事故时能第一时间自动联系报警,通知救援人员。
本文基于前人的思想进一步做出改进,设计了基于物联网技术的数智公路护栏系统,建设了智慧路侧感知网络体系,采用LED警示灯带进行危险实时预警,在不破坏路面的同时又提升了预警信息的可视化程度,从天然环境中俘获自给自足的能量,实现车辆碰撞检测及报警救援、大型动物检测、恶劣天气预警等功能,助力建设“交通强国”,加快实现“双碳”目标[7-8]。
1 设计原理
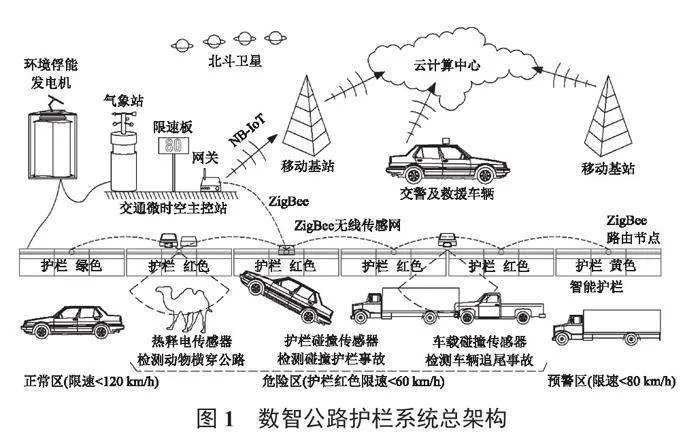
数智公路护栏系统由交通微时空主控站、智能护栏、环境俘能发电机及云计算中心四部分组成,如图1所示。
1.1 交通微时空主控站
通过对南方丘陵地区的公路开展田野调查,发现该区域在台风天气中呈现“六里不同天”的气象特点,故在公路沿线每隔3 km设置一个交通微时空主控站,将公路划分为众多连续的“交通微时空”,实现对公路的精细化分段管理。主控站集成了ESP32、小型气象站、ZigBee协调节点、北斗授时模块、NB-IoT模块、LED限速板等。小型气象站实时检测本微时空的风雨雾指标,主控站调用风雨限速数学模型,计算安全限速值[9];设置LED限速板,以绿、黄、红三种底色依次表示安全、警示、危险,并显示该处的限速值。
主控站采集本微时空的交通风险因子,采用边缘计算方法[10],提高本地数据的处理效率;根据风险因子改变本微时空每个护栏的颜色以警示车辆调速,在发生事故时,主控站主动报警。每个微时空把本时空的重要风险因子通过NB-IoT上传至云计算中心,云计算分析风险因子在时空中的扩散趋势,指挥相邻的微时空做出协同联动。
1.1.1 风雨环境下的限速模型建立
为确定车辆的安全行车速度值,以风雨环境下的行车速度为目标函数搭建限速模型。对设定条件下的车辆进行受力分析,如图2所示。
横向力系数μ的表达式为:
(1)
当车辆横向附着系数大于横向力系数时,不会发生侧滑事故,即:
(2)
得到限速模型:
(3)
式中:FW为侧向风力(单位为N);G为重力(单位为N);θ为路面横坡角;ih为路面横向坡度;V为车速(单位为m/s);g为重力加速度(单位为m/s2);μ为横向力系数;φ为横向附着系数。
1.1.2 基于车辆跟驰模型的限速值修正
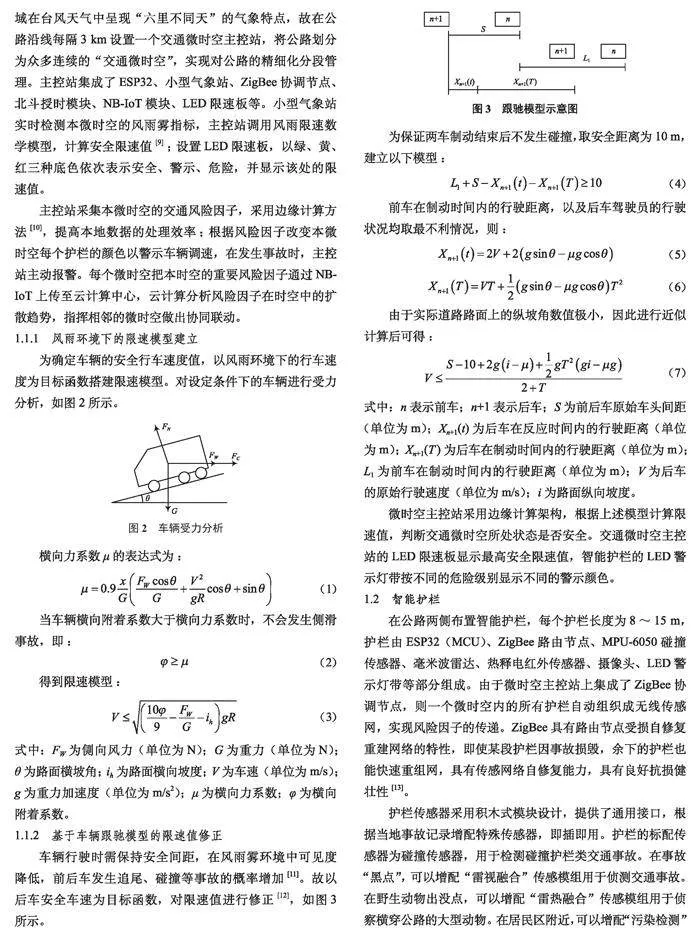
车辆行驶时需保持安全间距,在风雨雾环境中可见度降低,前后车发生追尾、碰撞等事故的概率增加[11]。故以后车安全车速为目标函数,对限速值进行修正[12],如图3所示。
为保证两车制动结束后不发生碰撞,取安全距离为10 m,建立以下模型:
(4)
前车在制动时间内的行驶距离,以及后车驾驶员的行驶状况均取最不利情况,则:
(5)
(6)
由于实际道路路面上的纵坡角数值极小,因此进行近似计算后可得:
(7)
式中:n表示前车;n+1表示后车;S为前后车原始车头间距(单位为m);Xn+1(t)为后车在反应时间内的行驶距离(单位为m);Xn+1(T)为后车在制动时间内的行驶距离(单位为m);L1为前车在制动时间内的行驶距离(单位为m);V为后车的原始行驶速度(单位为m/s);i为路面纵向坡度。
微时空主控站采用边缘计算架构,根据上述模型计算限速值,判断交通微时空所处状态是否安全。交通微时空主控站的LED限速板显示最高安全限速值,智能护栏的LED警示灯带按不同的危险级别显示不同的警示颜色。
1.2 智能护栏
在公路两侧布置智能护栏,每个护栏长度为8~15 m,护栏由ESP32(MCU)、ZigBee路由节点、MPU-6050碰撞传感器、毫米波雷达、热释电红外传感器、摄像头、LED警示灯带等部分组成。由于微时空主控站上集成了ZigBee协调节点,则一个微时空内的所有护栏自动组织成无线传感网,实现风险因子的传递。ZigBee具有路由节点受损自修复重建网络的特性,即使某段护栏因事故损毁,余下的护栏也能快速重组网,具有传感网络自修复能力,具有良好抗损健壮性[13]。
护栏传感器采用积木式模块设计,提供了通用接口,根据当地事故记录增配特殊传感器,即插即用。护栏的标配传感器为碰撞传感器,用于检测碰撞护栏类交通事故。在事故“黑点”,可以增配“雷视融合”传感模组用于侦测交通事故。在野生动物出没点,可以增配“雷热融合”传感模组用于侦察横穿公路的大型动物。在居民区附近,可以增配“污染检测”传感模组用于对人居环境的噪声及大气污染物进行检测。
主控站采用边缘计算架构,以提高微时空内的计算速度,根据实时风险因子快速改变相关区域护栏的颜色。绿色表示正常区,黄色表示预警区,红色表示危险区,同时限速板显示计算后的安全时速。因此,系统完全利用“智慧路侧单元”实现风险因子的采集和事故风险的预警,无需在车辆上安装车载端,便于快速推广。
1.2.1 碰撞事故检测
智能护栏配置有碰撞传感器,能感知到撞击护栏类的交通事故。护栏检测到激烈碰撞信号后,通过ZigBee网络告知本微时空主控站,主控站把当前时间和护栏的经纬度坐标,上传至云计算中心;云计算中心派遣救援车队赶往事故现场,同时向事故区后方的微时空传递事故信息。事故所处交通微时空(3 km)的护栏变红表示危险,后一个微时空的护栏变黄表示预警(提前6 km),避免出现连环追尾事故。
在事故“黑点”区域的护栏上增设“雷视融合模组”(毫米波雷达+摄像头),感知交通状态,微时空主控站采用边缘计算的方法精准检测公路上是否出现静止车辆[14]。当检测到静止车辆时,进一步分析车辆停滞原因是排队还是交通事故。若静止车辆或静止车流的前端位于路段中,则判定为发生交通事故;若静止车辆或静止车流的前端位于路口停止线处,且静止时间不超过红灯相位时长,则判定为车辆排队。
1.2.2 动物检测识别
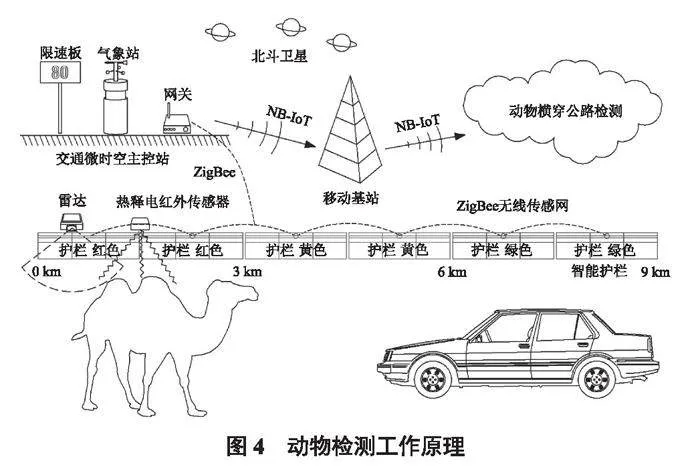
在郊区时常会出现横穿公路的大型动物,如果缺少预警机制,容易出现车辆和动物相撞的惨烈事故。因此,在这些路段的护栏增设“雷热融合模组”(毫米波雷达+热释电红外传感器),感知动物横穿公路的事件。热释电传感器检测波长为0.2~20 μm,动物体温辐射红外线波长为9~10 μm[15]。
热释电传感器检测到移动中的动物体温信号后,再启动毫米波雷达对移动物体的行为进一步判断,减少误判。当确定为动物横穿公路时,智能护栏的LED灯带变红,标识危险区域。动物检测工作原理如图4所示。
1.3 环境俘能发电机
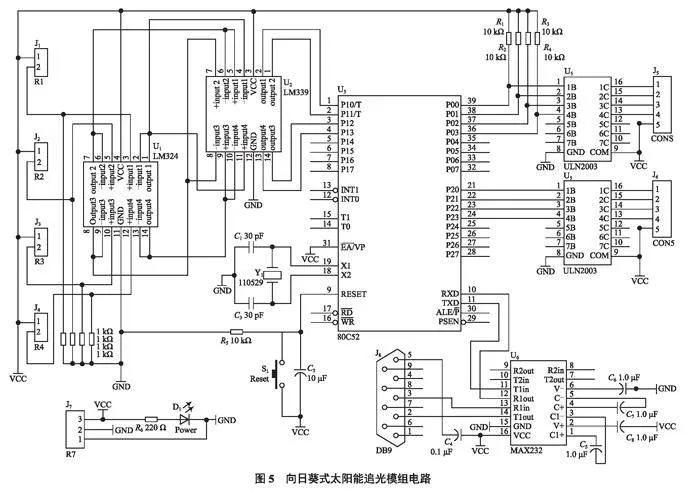
智慧公路的监测系统需要采用低压直流电,而低压直流电远距离转输时线阻损耗大[16]。高压交流电适合远距离供电,直接使用风险大,变电整流成本高,高速公路及郊区公路目前难以实现全面低压供电。因此设计了环境俘能发电机,由“向日葵式太阳能追光模组+垂直轴风力发电模组”组成,将其布置在道路两侧,承担本微时空的风险因子监测及边缘计算耗能。环境俘能实现数智公路护栏系统的能源自给自足,助力碳达峰、碳中和的战略目标实现。
追光模组像向日葵一般,始终追逐天空中光照的最强区域,实现太阳能发电效率的最大化,如图5、图6所示。向日葵式太阳能追光模组采用象限法将检测系统接收板分成四个象限,通过挡光板将象限隔离,光敏电阻分布在不同象限并采集感光信号。通过LM324电压跟随器,将信号传递到LM339电压比较器进行比较,然后输入STC89C52单片机进行处理。四个光敏电阻检测到的光线强度不一样时,单片机将会通过步进电机控制接收板向阳光强度强的地方偏转,实现对太阳的追踪,直至每个象限的受光强度相同,即可采集到充足的太阳能。
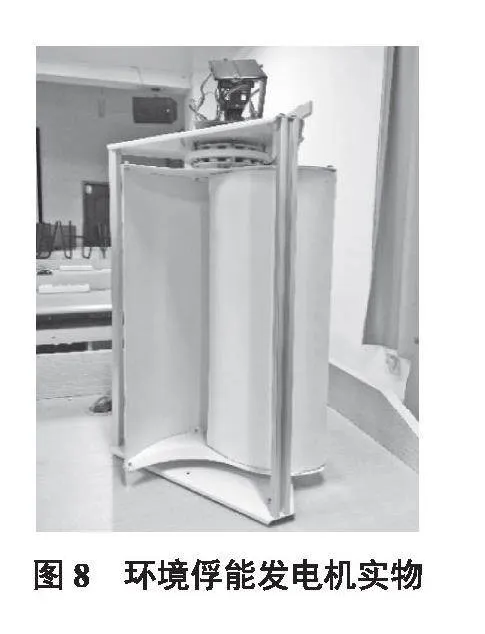
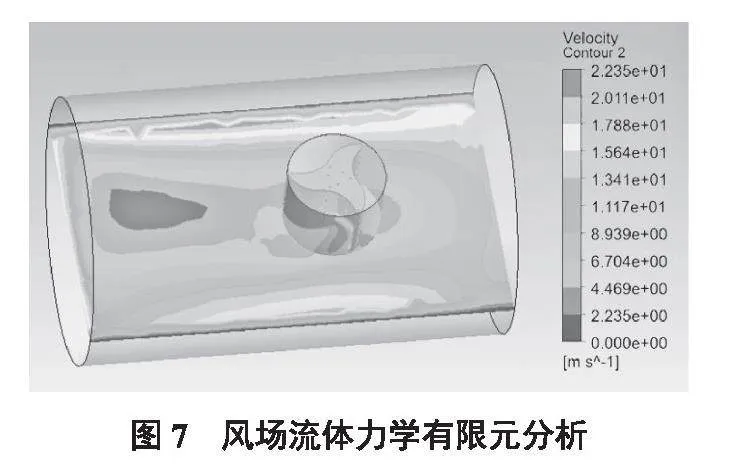
垂直轴风力发电模组利用车辆行驶所产生的弱小风能进行发电,在南方台风区域还具有多项优点,如各向弱风、强风下最高转速有限,强风侧压小,不容易倾倒。通过Ansys软件对弱风风场进行流体力学的有限元仿真分析[17],得到风力发电模组对风能利用的仿真分析图,如图7所示。通过对弱风能量的仿真分析,确定了风叶最佳的曲率和3D结构流域风向为从左至右,可见风力发电模组周围流域的风速大大降低,证实了该模组能较好地俘获环境中的风能,进而转换为电能,如图8所示。
风电模组利用汽车在高速公路上行驶时产生的扰动风能进行风力发电,配合光电模组,同时获取风能和太阳能,实现数智公路护栏系统的能源自给自足。
2 创新点
本系统具有如下创新点:
(1)发明了智能护栏:具有车辆碰撞检测、动物检测、恶劣天气预警等功能。
(2)发明了微时空主控站:组织ZigBee传感网,构建数智化的智慧公路感知网络。
(3)定义了交通微时空:将公路划分为交通微时空,实现细颗粒度的精细化管理。
(4)助力了时空智能化:在时空四维坐标中叠加了气象、动物、事故等风险因子,分析风险因子在时空中的扩散和演进,实现了时空智能化。
(5)设计了环境俘能发电机:解决了远郊公路建立智慧交通感知体系时所缺乏的能源问题,消除了远距离供电的“高压变电整流”的能源损耗,达到低碳节能的目标。
(6)具有沿海丘陵地域特色:南方丘陵台风地区存在“六里不同天”气象特征,还有飘忽不定的团雾、山口侧向强风等气象现象,系统设计过程中对此地域特色做了针对性研究。
3 结 语
本系统以公路为应用环境,运用物联网技术、数字化和智能化技术实现时空智能,同时通过向日葵式太阳能追光技术和风力发电装置,充分利用太阳能与汽车行驶产生的风能,极大程度地满足ZigBee无线传感网持续低电量消耗的需求,维持数智公路护栏系统能源供应,保障公路车辆的行驶安全,具有以下良好的现实意义和应用前景:
(1)助力双碳目标:维持自给自足能源供应,减少远距离低压供电的能量损耗。
(2)容易规模化推广:无需车载硬件端,可以降低推广门槛,有助于快速推广应用。
(3)加强事故“黑点”的风险监控:可广泛应用于地形不佳、气象恶劣等事故“黑点”区域。
(4)定义了路侧护栏的传感器扩展标准:通过增设其他传感器,可实现护坡应力监测、形变监测、公路安全检测,及一路绿波最优速度指示的交通指挥功能。
注:本文通讯作者为林宇洪。
参考文献
[1]中华人民共和国交通运输部.交通运输部关于推动交通运输领域新型基础设施建设的指导意见[EB/OL].(2020-08-03). https://www.gov.cn/zhengce/zhengceku/2020-08/06/content_5532842.htm.
[2]中华人民共和国交通运输部.公路安全设施和交通秩序管理精细化提升行动方案[EB/OL].(2022-02-21). https://www.mot.gov.cn/yijianzhengji/lishizhengji/202201/P020220114668883160367.pdf.
[3] GOKULAKRISHNAN P. Road accident prevention with instant emergency warning message dissemination in vehicular Ad-Hoc network [J]. PLoS ONE,2020,10(12):e0143383.
[4] HASAN M. Investigation of the effect of traffic parameters on road hazard using classification tree model [J]. International journal for traffic and transport engineering,2012,2(3):271-285.
[5] AMJADIAN M,AGRAWAL A K,NASSIF H. Feasibility of using a high-power electromagnetic energy harvester to power structural health monitoring sensors and systems in transportation infrastructures [C]// Proceedings of Conference on Sensors and Smart Structures Technologies for Civil,Mechanical,and Aerospace Systems. San Diego,CA(US):[s.n.],2021:11591.
[6]徐勤亚,孙玉涛,郑健. 基于云端实时监控的交通事故应急救援系统设计[J]. 价值工程,2019,38(23):284-285.
[7]中共中央,国务院.交通强国建设纲要[M].北京:人民出版社,2019.
[8]新华社.中共中央 国务院关于完整准确全面贯彻新发展理念做好碳达峰碳中和工作的意见[EB/OL].(2021-10-24). https://www.gov.cn/zhengce/2021-10/24/content_5644613.htm.
[9]林春水,林宇洪,郭建钢.基于BPNN的高速公路风雨天气限速系统的设计[J].交通运输工程与信息学报,2013,11(3):35-39.
[10]袁俊球,周斌,严向东.边缘计算方法在建筑工程实践的应用[J].工业建筑,2022,52(7):238.
[11]申海洋,霍魁,王德喜.基于机器视觉和深度学习的车辆碰撞预警算法研究[J].山西大学学报(自然科学版),2023,46(3):617-627.
[12]蒋帅,费天扬.基于车辆行驶模型与跟驰模型的安全评估研究[J].科学技术创新,2021,25(24):1-2.
[13]孙遒. ZigBee信号在无限感知系统位置中的应用[J].计算机时代,2022,40(7):77-79.
[14]黄智伟,冯蘅,刘鹏.基于雷视融合的路侧感知的应用[J].现代工业经济和信息化,2022,12(6):176-177.
[15]胡学敏,王韶伟.基于热释电红外传感技术的拦人闭锁装置在王家岭煤矿的应用[J].机械管理开发,2020,35(3):71-72.
[16]何萍.基于低压限流的直流电流控制的直流输电研究[J].煤炭技术,2013,32(3):72-73.
[17]杨坚,张善猛,曾励,等.基于ANSYS的电涡流位移传感器仿真分析[J].工程机械,2021,52(3):40-44.
作者简介:叶芷艺(2000—),女,福建农林大学交通运输专业硕士在读学生,研究方向为物联网工程。
李妙梅(2001—),女,中南大学交通运输专业硕士在读学生,研究方向为交通运输工程。
章可欣(2000—),女,福建农林大学交通运输专业硕士在读学生,研究方向为物联网工程。
林宇洪(1976—),男,硕士,高级实验师,研究方向为物联网工程。
收稿日期:2023-08-29 修回日期:2023-09-27
猜你喜欢
软件导刊(2016年9期)2016-11-07 21:56:29
软件导刊(2016年9期)2016-11-07 21:32:45
中国科技博览(2016年22期)2016-11-01 15:02:01
中国科技博览(2016年22期)2016-11-01 13:21:09
中国科技博览(2016年19期)2016-10-19 14:58:22
电脑知识与技术(2016年21期)2016-10-18 22:33:02
科技视界(2016年22期)2016-10-18 17:23:30
中国新通信(2016年16期)2016-10-18 11:01:39
中国新通信(2016年16期)2016-10-18 11:00:54
科学与财富(2016年28期)2016-10-14 01:24:06