时滞影响下自主车辆队列的稳定性分析
2024-09-24 00:00:00张琳虎杨景凯刘维宇
物联网技术 2024年5期
关键词:稳定性分析





摘 要:自主车辆队列可提升交通容量与行驶安全性、降低燃油消耗与污染排放。但车辆通信过程中存在时滞,会严重影响系统控制性能与稳定性。为此,针对含时滞的自主车辆队列,建立基于分布式控制器的自主车辆队列闭环控制系统,并提出一种稳定性分析方法。首先,将整个车辆队列闭环控制系统解耦为若干子系统,并在此基础上对子系统进行稳定性分析,提出了基于直接法的精确时滞稳定边界求解方法,得到了系统稳定的充要条件。最后,通过数值仿真验证了所提稳定性分析方法的有效性。
关键词:车辆队列;分布式控制器;直接法;稳定性分析;时滞稳定边界;闭环控制系统
中图分类号:TP237 文献标识码:A 文章编号:2095-1302(2024)05-00-04
0 引 言
我国经济的快速发展在推动汽车行业发展的同时,也使得交通拥堵、空气污染、资源消耗等社会问题日益突出。在解决上述问题过程中,自主车辆队列成为了智能交通领域的研究热点。自主车辆队列,是指通过智能交通系统和自动驾驶技术,利用车间通信,使车辆按照一定规则和策略有序行驶,从而提升道路容量,增强行车安全性,降低燃油消耗[1-2]。
在自主车辆队列行驶过程中,时滞必然存在且不可避免,这是由于车辆之间的通信需要经过多个环节,如传感器采集、数据传输、数据处理和决策等,每一个环节都会引起时滞的产生[3-4]。时滞的存在影响了车辆队列的暂态性能和稳态性能,削弱了车辆队列行驶的稳定性,严重影响交通安全[5-7]。因此,研究时滞影响下车辆队列系统的稳定性具有重要的意义[8-9]。
时滞影响下车辆队列控制系统的稳定性分析方法主要有两大类:时域分析法和频域分析法。时域分析法主要包括Lyapunov-Razumikin法[10]和Lyapunov-Krasovskii法[11]等。然而,时域法具有一定的保守性,无法获取完整的时滞稳定边界,尤其一些基于简单Lyapunov泛函或函数的方法仅能处理简单的时滞系统,无法适用于车辆队列系统的时滞稳定边界求解。因此,许多研究人员开始采用频域分析法解决时滞稳定边界的求解问题。频域分析法主要包括奈奎斯特判据[12]、小增益理论[13]等。文献[12]针对含输入时滞的分数阶线性多智能体系统,采用奈奎斯特判据进行稳定性分析,得到了系统稳定条件,然而该方法得到的仅是系统时滞稳定的充分条件。文献[13]针对含时变时滞的自主车辆队列系统,结合小增益理论与线性矩阵不等式获取了系统稳定的充分条件,而非充要条件。由此看来,现有方法仅能得到系统稳定的充分条件,而非充要条件,无法获取完整时滞稳定边界[14]。
综上所述,本文针对含时滞的自主车辆队列,提出基于直接法的精确时滞稳定边界求解方法,以获取系统稳定的充分必要条件。首先,设计分布式控制器,建立车辆队列闭环控制系统,并将整个闭环控制系统解耦成若干子系统,降低含时滞高阶超越方程分析的复杂度。在此基础上,利用直接法分析系统稳定性,求解车辆队列精确的时滞稳定边界,得到系统稳定的充分必要条件。
1 问题描述
1.1 车辆的纵向动力学模型
考虑N+1辆车(编号0~N)组成的自主车辆队列,包括1辆领航车与N辆跟随车。假设自主车辆队列在平坦的道路上纵向行驶,每辆跟随车的线性动力学模型可表示为[15]:
(1)
式中:pi(t)、vi(t)、ai(t)分别为第i辆车的位置状态、速度状态、加速度状态;T为车辆的时间常数;ui(t)为控制输入。令xi(t)=[pi(t), vi(t), ai(t)]T,车辆的状态空间表达式为:
(2)
式中:
1.2 自主车辆队列通信拓扑
自主车辆队列采用双向跟随式(Bidirectional topology,BD)拓扑,如图1所示。在BD拓扑中,自主车辆队列利用IEEE 802.11p通信协议构建V2V通信网络,实现车辆状态信息的共享。
对于BD拓扑,可以用邻接矩阵描述车辆间的信息传递关系,表达式如下:
式中:aij=1表示第i辆车可以接收到第j辆车的信息;否则,aij=0,假设车辆不能自通信,即aii=0。入度矩阵D=diag{deg1, deg2, ..., degN},。牵引矩阵用来描述领航车与跟随车之间的通信关系,定义为P=diag{p1, p2, ...,"pN}。那么,自主车辆队列的扩展拉普拉斯矩阵可表示为L=D-A+P。
1.3 分布式控制器
车辆之间保持所需间距是自主车辆队列能够安全、稳定行驶的基本要求之一。考虑固定间距策略下车辆队列理想车间距为固定值,与车辆速度无关。使用固定间距策略便于自主车辆队列控制,并且能有效提升道路容量[16],相应的自主车辆队列控制目标为:
(3)
式中,d0为固定常数,表示相邻车辆间的期望车间距。
考虑到车辆信息共享过程中存在单时滞现象,为实现自主车辆队列的领航-跟随目标(式(3)),设计含单时滞的分布式控制器:
(4)
式中,,、、分别为第i辆跟随车的位置误差、速度误差与加速度误差;是由分布式控制器的位置、速度与加速度增益组成的增益向量;τ为通信时滞。
1.4 车辆队列的闭环动力学模型
根据分布式控制器(式(4))与车辆的纵向动力学模型
(式(1)),第i辆跟随车的状态空间表达式为:
(5)
定义为车辆队列系统状态误差向量集合,那么构建整个自主车辆队列的闭环控制系统为:
(6)
式中:IN表示N阶单位矩阵;表示Kronecker积;L为扩展拉普拉斯矩阵。自主车辆队列系统的特征方程为:
(7)
2 基于直接法的精确时滞稳定边界求解方法
分布式控制器作用下的车辆队列闭环控制系统属于时滞系统,其特征方程式(7)包含指数项e-τs,是一个3N阶的准多项式,即含时滞的高阶超越方程,难以直接对其进行求解;而且随着跟随车数量N的增加,系统阶数增加,计算量变得难以接受。因此,可将整个车辆队列闭环控制系统解耦为若干子系统,以降低系统阶次,从而减少时滞稳定边界的求解难度。
根据代数图论的知识可得,存在一个非奇异变换矩阵P∈RN×N,使得,Λ为N阶对角矩阵,其对角元素λi为扩展拉普拉斯矩阵L的特征值。定义且φi∈R3,满足,则特征方程式(7)可表示为:
(8)
利用Kronecker积的相关性质,式(8)可简化为:
(9)
由于IN和Λ都是对角矩阵,车辆队列系统可解耦成若干3阶子系统:
(10)
子系统式(10)的特征方程为:
(11)
引理3.1:当且仅当所有子系统(式(10))渐近稳定时,整个车辆队列闭环控制系统渐近稳定[9]。
由此可知,分析整个车辆队列的稳定性,等价于分析所有子系统的稳定性。因此,综合所有子系统的时滞稳定边界即可得到整个车辆队列系统的时滞稳定边界。
针对第i个子系统,提出基于直接法的时滞稳定边界求解方法。假设s=jωi,j2=-1为子系统特征方程(式(11))的一个纯虚根,代入特征方程式(11)得:
(12)
根据特征方程纯虚根的共轭对称特性,
得到:
(13)
联合式(12)与式(13),消去指数项e-jωiτ和ejωiτ,得到:
(14)
通过求解式(14),可得到第i个子系统特征方程式(11)在时滞稳定边界处的穿越频率ωi。将穿越频率ωi代入式(13)
得到:
(15)
分离式(15)的指数项得到:
(16)
根据欧拉公式以及时滞项的频率周期性,可得第i个子系统的临界时滞集合Φi为:
(17)
式中,,,k=0, ±1, ...。临界时滞集合Φi中最小正数即为第i个子系统的时滞稳定边界τ*i。
接下来,分析子系统式(10)的纯虚根在对应时滞稳定边界τ*i处的渐近行为。时滞系统的纯虚根jωi关于时滞稳定边界τ*i的导数,称之为根趋势RT:
(18)
式中,sgn表示符号函数。由根趋势的定义可知,当时滞穿过时滞稳定边界时,特征方程式(11)的不稳定根(位于复平面右半平面)数量会发生变化。具体地,当RT=+1或-1时,不稳定根数量增加或减少2个,其中不稳定根数量为零的区间即为时滞稳定区间。
根据式(18)计算临界时滞处根轨迹的渐近行为,得到第i个子系统的时滞稳定区间τ∈(0, τ*i],区间的边界即时滞稳定边界。对所有子系统重复上述计算过程,可以得到各子系统时滞稳定区间,通过时滞稳定区间的叠加,即可得到整个车辆队列系统完整、精确的时滞稳定边界τ*。
综上所述,针对时滞作用下的车辆队列闭环控制系统,将精确时滞稳定边界的求解流程归纳如图2所示。
基于直接法的精确时滞稳定边界求解方法
Input:通信拓扑;控制器参数kp, kv, ka;车辆数目N
Output:时滞影响下车辆队列系统的精确时滞稳定边界
1:根据通信拓扑与控制器建立自主车辆队列系统模型;
2:将车辆队列系统等效分解为N个子系统;
3:For i=1, 2, ..., N do
4:假设纯虚根s=jωi,根据式(14)求解子系统特征方程的穿越频率ωi;
5:根据式(17)求解第i个子系统的精确时滞稳定边界τ*i;
6:根据式(18)计算时滞稳定边界的根趋势,确定子系统的时滞稳定区间;
7:End for
8:对所有子系统的时滞稳定区间求交集,确定整个车辆队列系统的时滞稳定区间,区间的边界即为整个系统的精确时滞稳定边界τ*。
3 仿真验证
针对时滞影响下的自主车辆队列,通过数值仿真验证所提精确时滞稳定边界求解方法的有效性。考虑5辆跟随车与1辆领航车组成的同构自主车辆队列,车辆的惯性常数为T=0.5 s,期望车辆间距为d=50 m,控制器参数设计为kp=1,kv=2和ka=2。此时,自主车辆队列系统在不含通信时滞的情形下(τ=0)满足系统初始稳定。
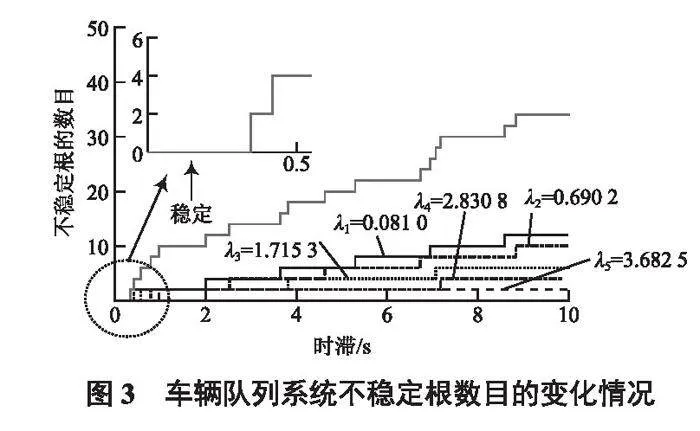
BD通信拓扑的扩展拉普拉斯矩阵有5个特征值,分别为0.081 0、0.690 2、1.715 3、2.830 3、3.682 5,将车辆队列闭环系统分解为5个子系统。按照所提基于直接法的精确时滞稳定边界求解方法,分别针对每个子系统求解时滞稳定边界,得到各子系统的不稳定根数目变化情况与时滞稳定边界如图3所示。从图3中可以看出,不稳定根为零的区间是时滞稳定区间,综合所有子系统的时滞稳定区间,得到整个车辆队列的时滞稳定区间为[0, 0.345 4 s],那么车队系统的时滞稳定边界为τ=0.345 4 s。
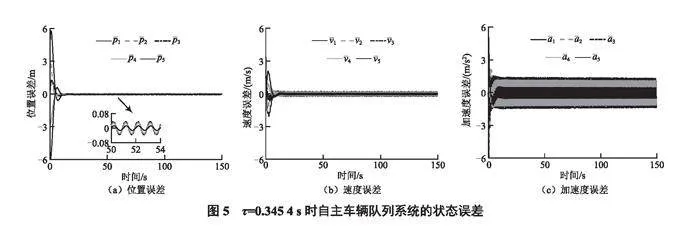
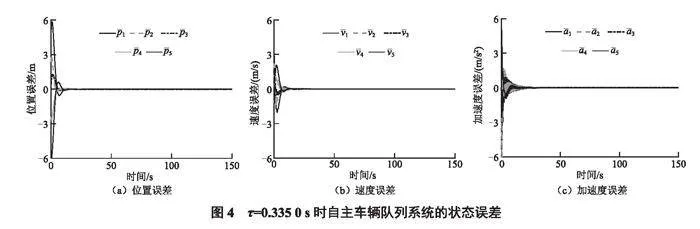
为了验证所计算车辆队列系统时滞稳定边界的正确性,选取三个时滞:第一个小于时滞稳定边界,为τ=0.335 0 s;第二个选在时滞稳定边界处,为τ=0.345 4 s;第三个大于时滞稳定边界,为τ=0.355 0 s。设定跟随车与领航车的初始位置误差pi(0)为-6~6 m的随机数,初始速度误差vi(0)为-3~3 m/s的随机数,初始加速度误差ai(0)为0 m/s2。分别绘制三组时滞影响下车辆队列系统的位置误差、速度误差以及加速度误差,仿真结果如图4~图6所示。
根据图4~图6可知,当时滞小于时滞稳定边界时,跟随车的位置状态误差、速度状态误差以及加速度状态误差呈现收敛趋势,跟随车可与领航车保持期望间距,自主车辆队列系统处于稳定状态;当时滞位于时滞稳定边界处时,跟随车的状态误差等幅震荡,系统处于临界稳定状态;当时滞大于时滞稳定边界时,跟随车的状态误差随时间增加逐渐发散,系统处于不稳定状态。因此,所求解的时滞稳定边界是精确的,从而验证了所提时滞稳定边界求解方法的正确性。
4 结 语
本文针对时滞影响下的自主车辆队列,提出了一种基于直接法的精确时滞稳定边界求解方法。首先,设计了含时滞的分布式控制器,建立了自主车辆队列闭环控制系统,并将其解耦为多个子系统,减小了含时滞高阶超越方程分析的复杂度。然后,基于直接法求解了系统的精确时滞稳定边界,获得了自主车辆队列系统稳定的充分必要条件。最后,分别选取小于、等于、大于时滞边界的时滞量,绘制了车辆队列系统的状态误差,验证了所提时滞稳定边界求解方法的正确性。
注:本文通讯作者为刘维宇。
参考文献
[1]陈虹,郭露露,宫洵,等. 智能时代的汽车控制[J]. 自动化学报,2020,46(7):1313-1332.
[2]郭戈,许阳光,徐涛,等. 网联共享车路协同智交通系统综述[J]. 控制与决策,2019,34(11):2375-2389.
[3] JIA D,LU K,WANG X,et a. A survey on platoon-based vehicular cyber-physical systems [J]. IEEE communications surveys and tutorials,2016,18(1):263-284.
[4]李旭光,张颖伟,冯琳. 时滞系统的完全稳定性研综述[J]. 控制与决策,2018,33(7):1153-1170.
[5] PETRILLO A,SALVI A,SANTNI S,et al. Adaptive multi-agents synchronization for collaborative driving of autonomous vehicles with multiple communication delays [J]. Transportation research Part C,2018,86:372-392.
[6]常雪阳,许庆,李克强,等. 通信时滞与丢包下能网联汽车控制性能分析[J]. 中国公路学报,2019,32(6):216-225.
[7] ABOLFAZLI E,BESSELINK B,CHARALAMBOUS T. On time headway selection in platoons under the MPF topology in the presence of communication delays [J]. IEEE transactions on intelligent transportation systems,2021,23(7):8881-8894.
[8] KHALIFA A,KERMORGANT O,OMINGUEZ S,et al. Platooning of car-like vehicles in urban environments:an observer-based approach considering actuator dynamics and time delays [J]. IEEE transactions on intelligent transportation systems,2021,22(9):5684-5696.
[9] ZHENG Y,LI S E,WANG J,et al. Stability and scalability of homogeneous vehicular platoon:study on the influence of information flow topologies [J]. IEEE transactions on intelligent transportation systems,2015,17(1):14-26.
[10] XU L,ZHUANG W,YIN G,et al. Energy-oriented cruising strategy design of vehicle platoon considering communication delay and disturbance [J]. Transportation research Part C:emerging technologies,2019,107:34-53.
[11] CHEN J,LIANG H,LI J,et al. Connected automated vehicle platoon control with input saturation and variable time headway strategy [J]. IEEE transactions on intelligent transportation systems,2021,22(8):4929-4040.
[12] SHI M,YU Y,XU Q. Delaydependent consensus condition for a class of fractional-order linear multi-agent systems with input time-delay [J]. International journal of systems science,2019,50(4):669-678.
[13] SADEK B A,EL HOUSSAINE ,NOREDDINE C. Small-gain theorem and finite-frequency analysis of TCP/AQM system with time varying delay [J]. IET control theory amp; applications,2019,13(13):1971-1982.
[14]李旭光,张颖伟,冯琳. 时滞系统的完全稳定性究综述[J]. 控制与决策,2018,33(7):1153-1170.
[15]郑洋. 基于四元素构架的车辆队列动力学建模与分布控制[D]. 北京:清华大学,2015.
[16] CHEHARDOLI H,HOMAEINEZHD M R,GHASEMI A. Control design and stability analysis of homogeneous traffic flow under time delay:a new spacing policy [J]. Proceedings of the institution of mechanical engineers,Part D:journal of automobile engineering,2019,233(3):622-635.
作者简介:张琳虎(1998—),男,河南开封人,硕士,研究方向为自主车辆队列控制。
杨景凯(1998—),男,陕西宝鸡人,硕士,研究方向为智能交通、深度学习。
刘维宇(1987—),男,陕西西安人,博士,副教授,研究方向为电动微纳流体、人工智能。
收稿日期:2023-05-13 修回日期:2023-06-09
基金项目:国家自然科学基金(面上项目)(12172064)
猜你喜欢
科学与财富(2016年34期)2017-03-23 12:29:20
科技视界(2016年27期)2017-03-14 11:38:59
价值工程(2016年36期)2017-01-11 19:49:21
中国高新技术企业(2016年32期)2016-12-27 11:59:20
湖南大学学报·自然科学版(2016年6期)2016-07-14 09:24:09
科教导刊·电子版(2016年5期)2016-04-19 08:03:37
计算技术与自动化(2015年3期)2015-12-31 16:51:23
科技视界(2015年27期)2015-10-08 12:13:09
居业(2015年6期)2015-09-05 19:58:14
科技视界(2015年12期)2015-04-28 09:25:52