变电站巡检机器人定位校准算法研究
2024-09-23 00:00:00卢思毅白晓怡
电子产品世界 2024年8期
关键词:变电站巡检;巡检机器人;定位校准;电力工业
中图分类号:TP242;TM63 文献标识码:A
0 引言
随着电力行业的快速发展和技术的进步,变电站作为电网系统的关键节点,其安全运行和有效维护变得愈发重要[1]。而在变电站巡检中,机器人技术的应用日益普及,这开辟了提升巡检效率和准确性的新途径。然而,现有的定位校准方法在实际应用中暴露出一些局限性。例如,在复杂的变电站环境中,机器人定位精度受到金属结构遮挡、信号干扰等因素的影响,导致定位误差较大;同时,长期运行后环境变化和射频识别标签损坏等问题也给定位校准带来挑战。这些问题影响了机器人在实际巡检中的稳定性和准确性,需要通过深入研究和技术创新来解决[2]。
因此,本文旨在开发一种更加精确、稳定的变电站巡检机器人定位校准算法,以应对复杂环境下的挑战,并通过实验验证其在实际场景中的有效性和可行性。该算法不仅有助于提升变电站巡检的效率和质量,也为智能化巡检技术的进一步发展提供了有益的探索和经验积累[3]。
1 巡检机器人定位方法
1.1 磁标定位技术
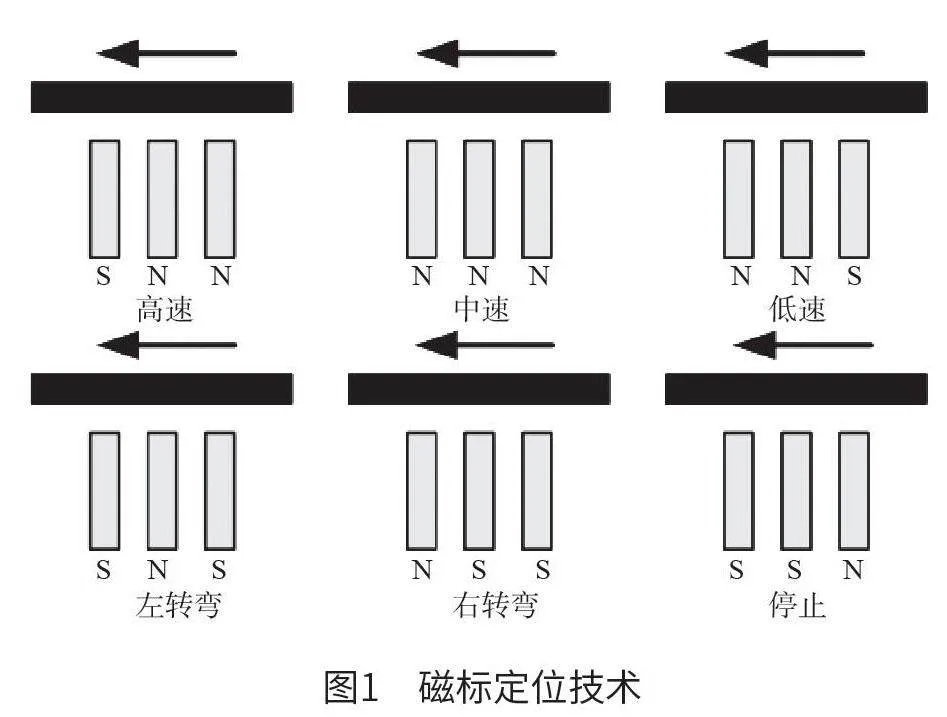
磁标定位技术利用磁性标记物(磁标)作为定位参考点,通过检测和分析磁场信息来确定机器人的位置和方向,如图1 所示。该技术的核心原理是利用磁标在空间中产生的磁场特征进行位置识别,从而实现精确的定位和导航。磁标通常由具有特定磁性的材料制成,可以在不同的环境中稳定地产生磁场。机器人配备磁场感应器或磁力计等传感器设备,通过感知周围磁场的强度和方向,计算机器人相对于磁标的位置关系。
磁标定位技术具有稳定性强、适用性广等优点,然而,磁标定位技术也存在一些挑战和局限性,如对磁场干扰的敏感性较强、对磁标布置位置的要求较高等。因此,在实际应用中需要综合考虑各种因素,选择合适的定位技术和方法,以实现巡检机器人在变电站等复杂环境中的准确定位和稳定导航。
1.2 条形码定位技术
条形码定位技术是一种用于自动识别和解读条形码的技术,在零售、库存管理和物流行业中非常关键。该技术通过使用特定的扫描设备(如条形码扫描器或带有相应软件的智能设备)来识别和解码打印在商品上的黑白条纹。条形码中的条纹代表了数字和字符信息,其可以通过特定的编码规则转换为电子数据,以便计算机系统能够理解和处理。
条形码定位技术的关键是其能够准确、快速地捕捉条形码图像,并通过数字图像处理技术对其进行分析和解码。在图像捕捉过程中,扫描器首先需要确定条形码的位置和方向,这通常涉及图像预处理,如调整亮度和对比度以及调整应用算法来定位条形码的精确边界。条形码图像被准确捕捉并优化后,扫描系统使用解码算法来读取条纹之间的宽窄比例差异,这些差异对应不同的数据字符。解码过程完成后,相关的信息被转化为数字或文本形式,然后被电脑系统用于各种应用,如库存跟踪、销售点交易处理和物流控制。
随着技术的进步,条形码定位技术已经可以在各种环境下高效工作,包括在光线不佳或条码部分损坏的情况下。此外,条形码系统越来越多地利用机器学习技术,以提高识别的准确性和处理速度,确保其在动态和多变的商业环境中的可靠性和效率。
1.3 射频识别定位技术
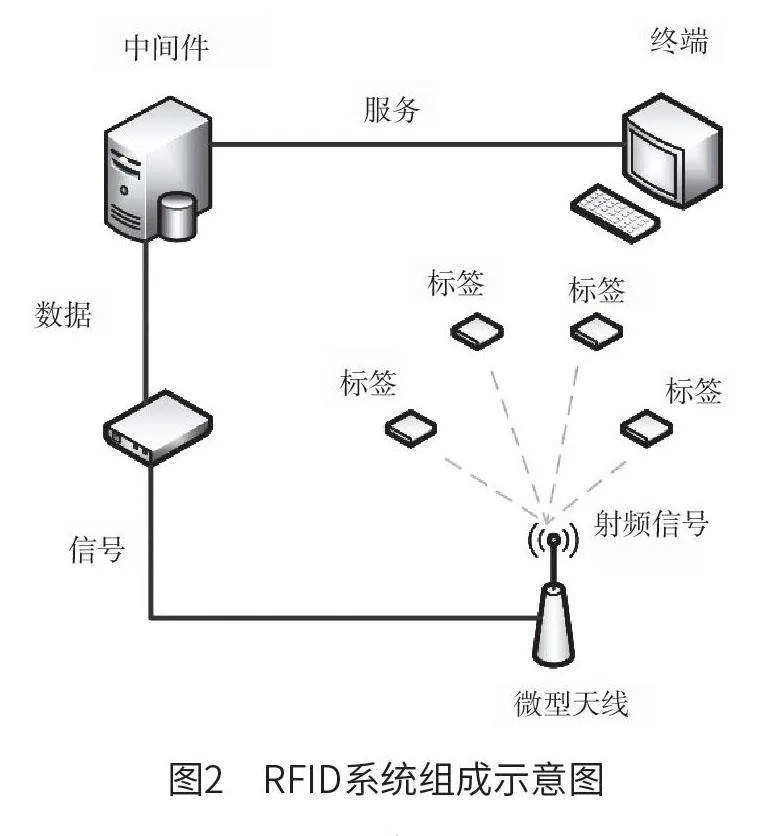
射频识别(radio frequency identification,RFID)定位技术利用RFID 标签作为定位参考点,通过读取标签发送的无线电信号来确定机器人的位置和方向[4]。这种技术的核心原理是在机器人上安装RFID读取设备,当机器人靠近安装有RFID 标签的位置时,读取设备可以接收标签发送的信号,并根据信号强度、时间延迟等信息计算机器人相对于标签的位置关系。RFID系统组成示意图如图2所示。
RFID定位技术的优势在于其具有高精度和良好的实时性。但是RFID 定位技术也存在一些局限性。例如,对于标签的布置和读取设备的灵敏度要求较高;在复杂环境下可能受到信号干扰或遮挡等因素的影响,导致定位精度下降。
2 基于LANDMARC算法的定位校准方法
RFID技术通过无线电信号识别物体,而接收信号强度指示(received signal strength indication,RSSI)方法则用于衡量接收的无线电信号强度。在室内定位方面,RSSI 常根据接收到的信号强度水平来确定设备或物体的位置。而LANDMARC 算法则是利用RFID 信号强度进行位置确定。该算法通过分析不同位置上RFID 标签发出的信号强度来确定设备或物体的位置。因此,RFID 技术负责提供物体识别的基础,RSSI 技术用于衡量信号强度,而LANDMARC 算法则结合这些信息,实现了基于信号强度的室内定位。
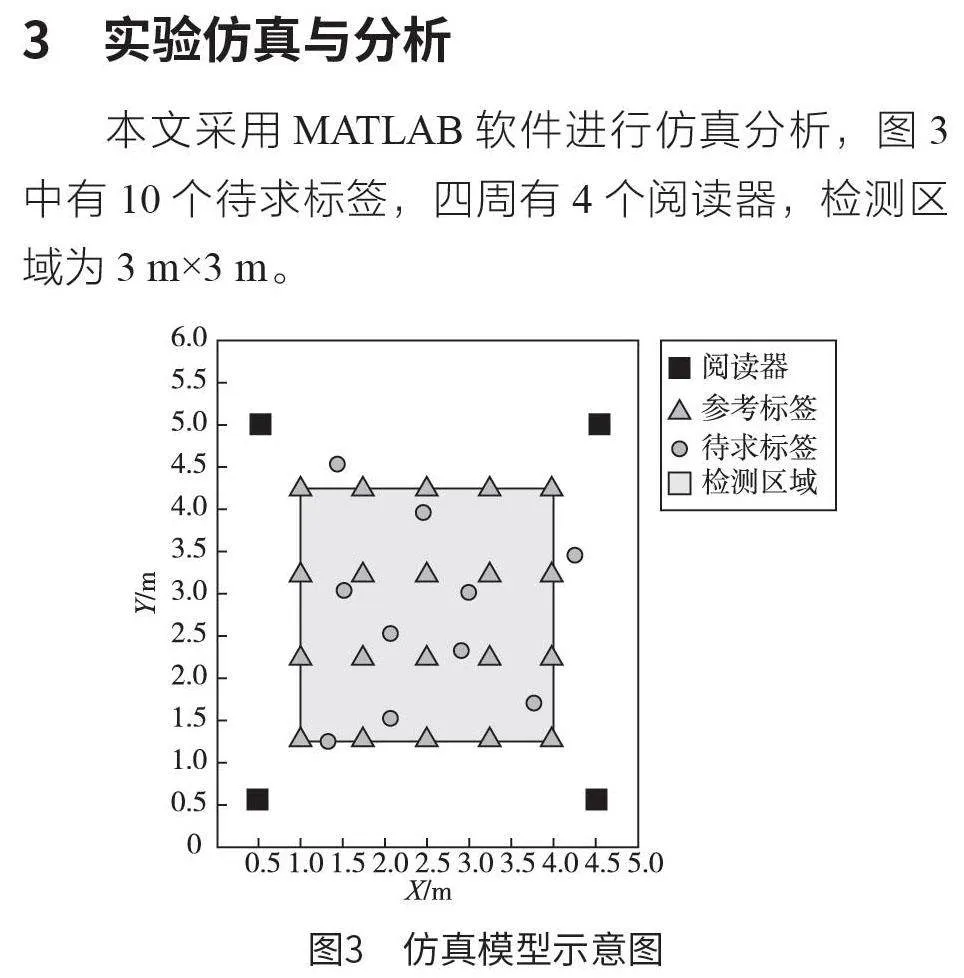
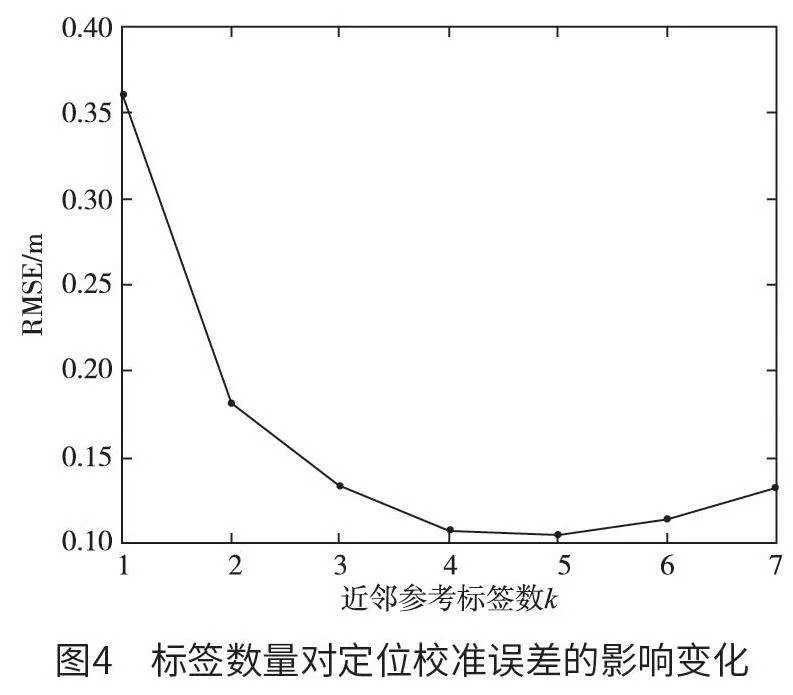
该实验中目标标签的坐标是已知的,通过计算其横、纵坐标之间的均方根误差(root meansquared error,RMSE)来表示坐标的误差。RMSE可以反映算法的定位校准精度。由图4 可知,当近邻参考标签数k 为5 时,算法的RMSE 达到最低值0.105 m。
4 结论
随着室内定位技术的进步和应用需求的不断增长, 准确的定位校准方法对于提高定位系统的性能至关重要。本文提出了一种基于LANDMARC算法的定位校准方法,通过优化参考标签数量和布局,结合KNN 算法进行坐标计算,旨在增强定位系统的准确性和稳定性。实验结果表明,当近邻参考标签数为5 时,该定位校准方法达到了最低的RMSE,这表明该参数优于其他参数设置的效果,证实了该方法在增强定位系统精度上的有效性和可行性。未来的研究方向包括进一步优化算法参数、结合更多的传感器信息进行融合定位,以及探索在复杂环境下的定位校准方法,以满足日益增长的室内定位应用需求。