超深缝洞型碳酸盐岩储层精准定位技术探索实践
2024-09-13 00:00:00李国会郭越孙甲庆丁尧
西南石油大学学报(自然科学版) 2024年4期
关键词:碳酸盐岩


关键词:缝洞型;碳酸盐岩;VSP;驱动处理;偏移;归位
引言
塔里木盆地缝洞型碳酸盐岩油藏埋藏深度大,有些地区甚至超过8000m,缝洞储层储集空间尺寸小、具有极强的非均质性。同时,由于地下地质条件复杂,兼有二叠系火成岩岩性变化造成的速度突变影响,有些地区常规叠前深度偏移对超深缝洞体成像不精确,洞穴储层空间归位精度不高,不能满足钻井工程上对缝洞体空间位置精度的要求,使得钻井过程中无法钻遇有效储层达到地质目的,需要进行储层改造,甚至导致钻井失利或开窗侧钻,直接增加了钻探成本。因此,生产上需要一种精确度、经济性和时效性均能兼顾的缝洞储层空间定位技术方法,在不影响钻井进度的前提下完成储层的再次定位,作为常规叠前深度偏移资料的补充,来共同指导钻井靶点调整及轨迹优化。通过多年的探索与实践,形成了以VSP驱动处理为核心的随钻地震储层精准定位技术,通过提前准备需要的资料及优化驱动处理技术流程,实现了在采集处理VSP资料之后72h内重新完成井周6km 6km内的叠前深度偏移处理,完成缝洞储层的再次精准定位,小范围重新驱动处理保证了经济性与时效性,能够在不影响钻井进度的前提下完成靶点的优化调整。该方法应用于120余口钻井的随钻跟踪过程中,有效提高了储层直接钻遇率,放空漏失率从60%提高到80%,为类似缝洞型储层的精细定位积累了宝贵经验。
1储层特征及技术难点
塔里木盆地奥陶系缝洞型碳酸盐岩基质物性差,储集空间主要由机械破碎及岩溶作用所形成的洞穴、孔洞、裂缝组合而成[1],缝洞体大小不均、结构十分复杂、储层纵横向非均质性极强。正演研究及钻井地震标定表明,缝洞储层在地震剖面上主要表现为“串珠状”反射或“杂乱状”反射特征,且振幅异常强度与储层发育强度呈正相关,当储集体发育达到一定规模时,在地震资料上常表现为“串珠状”反射[27],“串珠状”反射是目前最主要、最有利的钻探目标。随着勘探由隆起、斜坡向拗陷深部不断推进,“大缝大洞”的潜山储层也逐渐转变为发育规模相对较小断控储层,“串珠状”储层逐渐变小、变深,储层的空间归位难度越来越大。
由于地下地质条件复杂,加之储层埋深变大、储层尺寸变小,实现超深缝洞储层的精准成像难度倍增。受地震资料采集偏移距和低信噪比的限制,三维地震资料随着深度的增大,对速度的敏感性变差,单独依赖三维地震资料得到的速度精度不够高,无法满足精准定位储层的需求。依据常规叠前深度偏移资料部署的钻井放空漏失率保持在60%左右,部分钻井不能直接钻遇有利储层,必须进行酸压等储层改造工作甚至侧钻,大幅增加了生产成本。
2方法探索与技术流程
随钻地震技术最早在20世纪30年代提出,其方法是利用钻头作为震源信号来研究地下信息[8],但由于钻头工艺的限制一直没有取得好的应用效果。之后,业界提出了随钻VSP技术,其方法是在地面设置震源,利用安装在井下钻具上的检波器接收地面震源释放的能量[9]。该技术具有实时测量且不损失钻井时间的优点,但仪器稳定性受井况影响较大,难以适应超深高温高压的钻井工况,并且费用高昂,难以实现规模化应用。期间国内诸多学者一直对随钻地震技术进行着跟踪及应用研究[1014]。
随着塔里木油田碳酸盐岩进入规模勘探开发阶段,开发井数量大幅增加,不能直接钻遇有利储层的生产问题日益突出,在实现了处理方法从时间偏移转变为深度偏移、叠后深度偏移转变为叠前深度偏移的基础上,塔里木油田开始探索了一条新的随钻处理技术思路,即在钻井过程中钻至目的层之前采集普通零偏移距VSP资料,在先期三维地震处理中得到的道集、速度场等资料基础上,利用新获取的VSP速度信息对地面地震速度场和各向异性参数进行修正,利用新速度场重新偏移,再次确定缝洞储层空间位置,从而与原靶点对比分析后进行靶点调整并优化钻井轨迹[1521]。该方法充分利用了地面三维地震资料信息和新采集的VSP数据,达到了缝洞体精确定位的目的。经过多年来的探索实践与技术攻关,该技术逐步走向成熟,形成了针对缝洞型碳酸盐岩的VSP驱动处理技术流程(图1)。
流程中主要有资料准备、VSP驱动叠前深度偏移处理、叠后保真处理及成像分析与应用等4个阶段,其中,VSP驱动叠前深度偏移处理包括VSP驱动速度校正、地震约束横向速度插值、速度场与各向异性场优化、“盲点”速度优化及各向异性深度偏移这几个步骤,是整个流程的重点。
3应用实例及效果
3.1数据准备
真实规范的前期地震处理及井资料是VSP驱动处理的基础,要保证驱动处理的时效性,在采集VSP资料之前必须做好已有三维地震数据的准备,需要提前对原来三维地震处理形成的道集、速度场、各向异性场等进行质量控制,为了满足6km 6km偏移范围内偏移孔径对偏前数据的需求,通常需要准备井点周边16km 16km的CMP道集,发现有问题要及时完成相应校正优化工作[22]。同时收集齐全驱动处理井区周边钻井的VSP、测井及钻井分层等资料,进行数据加载等工作建立好工区,为后续VSP驱动处理做好准备。
同时,在钻井钻至目的层之上200 300m时采集普通零偏移距VSP资料,利用其解释成果开展VSP驱动处理。
3.2VSP驱动速度建模
VSP驱动地震处理首要任务就是要解决利用VSP资料快速准确修正地震速度模型的难题,即利用新钻井信息及VSP速度快速校正地震速度误差[23]。VSP驱动速度建模大体可以分为3步:VSP驱动地震速度校正、VSP井底地震速度更新以及地震约束横向速度插值。
3.2.1VSP驱动地震速度校正
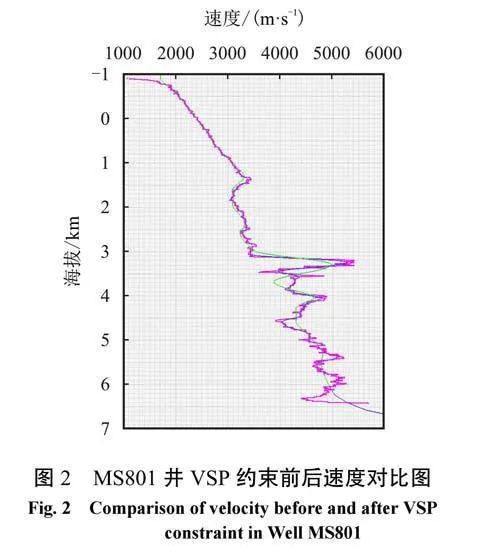
VSP采集深度以上垂向速度利用VSP速度进行约束更新,先对初始速度进行平滑,消除层速度间变化过大对偏移产生的影响,通过井速度与平滑后速度对比分析,发现还存在一定差异性,将两速度进行运算求取比例因子,并将比例因子应用于平滑后速度场,产生新的VSP约束后速度场(图2),这种方法可以实现井旁地震速度与VSP速度的高效吻合,吻合率达到95%以上。图2中绿色为原三维地震偏移处理中该位置的速度,紫色为VSP速度,蓝色为VSP约束后速度,可以看出,约束后速度与原偏移速度相比整体趋势保持一致,但在大于1km地层速度存在一定差异,特别是在大于3km以上的地层中,优化后速度上更加精细,能够反映地层速度变化的更多细节。
3.2.2VSP井底地震速度更新
受VSP测井采集深度限制,VSP采集深度以下至目标靶点间存在速度“盲区”,偏移速度得不到有效校正,为了提高VSP采集深度以下速度精度,减少这部分速度不准造成的目标储层的空间位置误差,应参考周边完钻井的VSP速度、声波测井或后续钻进过程中得到了声波速度对速度进行校正。
3.2.3地震约束横向速度插值
VSP速度驱动能够提供井点附近准确的垂向速度,但不能提供准确的横向速度变化。速度横向变化可以通过地质层位约束的空间插值和外推,把VSP速度推展到速度建模的范围,提高整个工区速度精度。
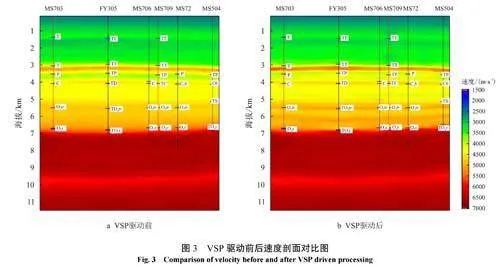
常规插值方法都需要准确的地震层位进行约束,而地震导向速度插值技术无需地震层位,采用地震成像数据体的相干振幅趋势进行横向约束,对于难以用解释准确获得地震层位的数据更为适用,避免了地震层位解释带来的误差。首先应用地震导向速度插值技术对比例因子进行插值外推,然后应用到原始地震速度场,得到更为精确的地震速度模型,产生新的VSP驱动地震叠前深度偏移速度体[1921,23]。从VSP驱动前后速度剖面(图3)上来看,VSP驱动前后深部地层(特别是3000m以深)速度更加细致、分辨率更高、层次分明,横向上地层速度相对稳定的规律性更强。
3.3速度模型迭代优化
利用VSP速度驱动对地震速度重新建模后,速度误差减小,更符合地下实际地质情况,但是该速度是垂向地震速度,需要和对应的各向异性参数体结合才能得到地震成像速度。初始各向异性参数场通常可以采用保时层析方法得到的各向异性参数体,但是当道集信噪比比较低时,通过网格层析不能实现对各向异性参数的快速更新,得到相对准确的地震成像,此时应考虑对初始Delta参数场进行数学运算得到与VSP驱动速度更为匹配的各向异性参数,这样快速实现目标串珠的准确成像,降低网格层析及层控网格层析的迭代次数。
确定了初始各向异性参数体之后,需要通过网格层析迭代进行速度与各向异性参数校正。其迭代过程主要有两步:各向异性场优化、VSP井底至靶点“盲区”速度优化。
3.3.1各向异性场优化
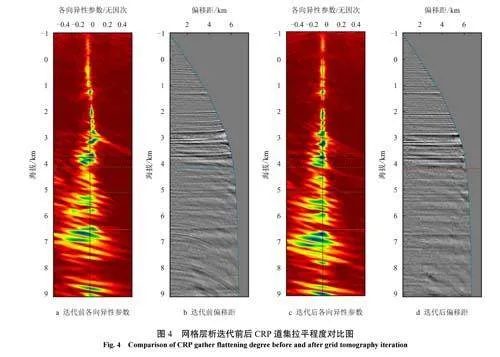
经过VSP驱动地震速度校正,VSP井底以上地震成像速度已经相对准确,因此,对于VSP井底以上,在迭代过程中保持地震速度相对不变,通过迭代各向异性参数将每个深度偏移CRP道集的每个较强同相轴拉平,得到更准确的叠前深度偏移成像。
根据以往处理经验及弱各向异性假设, 取值范围应该变化不大,一般通过一轮迭代就能得到相对准确的浅层成像,满足VSP驱动处理对时效性的要求。
迭代过程中对Delta与Epsilon参数分别进行修改,得到的Epsilon体可以使CRP同相轴远偏移距拉平程度更好(图4)。
3.3.2VSP井底至靶点“盲区”速度优化
对VSP采集深度以下“盲区”速度开展层控+速度扫描的方法进行迭代,以获得相对准确的成像速度。
开展沿层层析速度更新,确保横向速度准确。当周边井较多时,利用周边井以及地震构造模型可以很好地控制奥陶系以上横向速度趋势,这时只需要对奥陶系标志层进行沿层层析。部分井(特别是开展预探井的VSP驱动处理时)周边井较少,无法实现利用周边井控制横向速度趋势,需要通过沿层层析的方法进行速度更新奥陶系灰岩顶面以上的速度,从上到下逐层反演在层速度估算和每一层反射层几何形态描述之间交替进行,随着从上至下分析,模型修改与模型估算交替进行,避免层速度和反射面几何形态误差累计,以提高速度横向速度精度[2325]。最后对于目标靶点,通过速度扫描方法,比较缝洞体成像效果,以确定最佳成像速度。
3.4各向异性深度偏移及叠后处理
VSP约束获得了精准偏移速度场后,基于缝洞储层成像精度及时效性方面的考虑,在叠前深度偏移算法上选择了占用资源少且实现效率较高的柯希霍夫积分法,从处理时效及应用效果上来看,柯希霍夫积分法是目前最适合VSP驱动处理的偏移方法。
由于奥陶系目的层段的信噪比较低,一般存在较重的伴随相位,串珠显示弱,导致缝洞型储层难以准确辨别,需要进行适当的叠后处理适。但是保幅性好的叠后处理方法通常是在叠前道集上进行,耗时较久,无法满足VSP驱动处理对于时效性的要求,需要在叠后剖面上探索快速且保幅性好的提频修饰方法。在叠后剖面上提高地震资料的分辨率,补偿地下介质衰减性造成的地震波能量损失的方法主要有反Q滤波方法、时频分析吸收补偿等方法,但是这些方法的保幅性较差。为了解决保真性和时效性的问题,采用振幅因子保持技术确保数据保幅性,在此基础上利用反Q滤波等方法提高目的层信噪比与分辨率,使目标成像得到较大的改善。
3.5应用效果
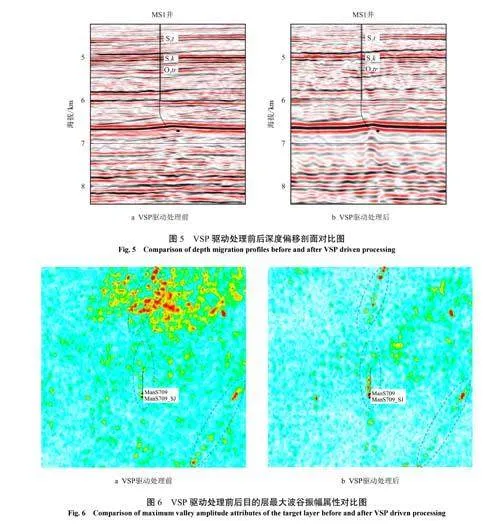
VSP驱动处理使得目标成像得到明显改善,信噪比明显提高,串珠聚焦、空间位置清晰,储层信息得到凸显(图5b),各井随钻处理资料的均方根振幅属性图上钻探目标更加清晰,地震深度误差也得到一定校正,达到了串珠储层精准空间定位的目的。
从VSP驱动处理前、后目的层最大波谷振幅属性对比图(图6)上来看,驱动处理后地震资料随机噪音得到了明显压制、信噪比更高,钻探目标串珠储层更清晰,串珠中心平面位置更明确(图6b),同时,驱动处理后资料所反映的储层沿走滑断裂线性展布特征(图中蓝色框)更清楚,为优化钻探靶点提供了资料基础。平面、剖面结合就可以精准定位目标缝洞体的空间位置,为钻井轨迹调整提供基础资料。
MS801井VSP驱动处理资料显示储层中心偏离原设计靶点,据此将靶点往南西调整约35m(图7中新靶点),同时进行了轨迹优化(图6中的蓝色虚线为优化后轨迹平面投影),靶点调整后该井在钻探过程中发生漏失,酸压后测试获得高产,证实了VSP驱动处理资料的可靠性。
通过该种方法完成120余口钻井的VSP驱动处理研究工作,提高了井周6km 6km内地震资料成像精度,为钻井的靶点调整及轨迹优化提供了依据,其中45口井基于VSP驱动处理资料调整了靶点位置及钻井轨迹,靶点平面最大调整距离达到82m,靶点纵向最大调整深度达到180m,钻探目的层放空漏失率达到80%,有效提高了储层直接钻遇率,保证了钻井成功率在90%以上,有力支撑了碳酸盐岩油藏的快速建产,已经成为速度复杂区缝洞储层精准定位的必备技术手段。
4结论
1)VSP驱动地震处理是一种兼顾时效性、经济性的技术手段。通过优化技术流程,能够在不影响钻井钻进的情况下,在72h之内为非均质较强的缝洞型碳酸盐岩钻井轨迹优化和精准入靶提供依据,避免动辄几百万的储层改造或侧钻费用,是对常规叠前深度偏移资料的有益补充。
2)VSP驱动处理技术可以明显提高碳酸盐缝洞体空间归位精度,有效提高目的层的储层直接钻遇率,对超深层缝洞型油气藏精细勘探开发具有重要意义。
3)驱动处理中可以紧密跟踪钻井进度,结合后续收集到的钻井地质资料和测井资料,继续进行多轮次速度场更新调整,进一步提高目标成像精度,指导钻井钻进,达到精准命中储层的地质目的。
4)建议试验非零偏VSP测量方法,增强VSP资料对测量井底以下深层速度的探测能力,进一步提高测量井底至目标靶点“盲区”速度精度,不断完善VSP驱动处理技术。
猜你喜欢
西南石油大学学报(自然科学版)(2024年4期)2024-09-13 00:00:00
钻井液与完井液(2022年4期)2022-10-26 06:40:38
石油与天然气地质(2021年3期)2021-06-29 03:33:02
四川地质学报(2020年3期)2020-05-22 06:25:32
钻井液与完井液(2019年4期)2019-10-10 01:57:18
西南石油大学学报(自然科学版)(2018年6期)2018-12-26 00:59:56
钻井液与完井液(2018年5期)2018-02-13 01:06:54
天然气勘探与开发(2015年3期)2015-12-08 08:28:35
天然气与石油(2015年3期)2015-02-28 17:01:21
石油与天然气地质(2014年6期)2014-03-11 18:42:22