基于PLC+4G的病案库房远程巡查机器人研发
2024-08-22 00:00:00冯毅许华忠冯钰宁蓝宇
科技创新与应用 2024年24期
摘 要:研发一款远程视频巡查库房中病案霉变痕迹、虫害痕迹及库房渗水痕迹的机器人。机器人采用四轮行走形式,2个后轮由2台步进电机分别驱动。机器人上安装垂直升降丝杆,其滑块上安装水平伸缩丝杆,一台筒形病案检查摄像机安装在水平丝杆滑块上,2根丝杆均由步进电机驱动,另有2台360°球形摄像机保证机器人行走无盲区。设计用户手机端HMI,点击HMI上按钮,通过物联网-4G-4G网关数据链向机器人上的PLC发出指令,控制机器人把病案检查摄像机移动到检查位置。3台摄像机视频通过另一条4G-物联网数据链传到用户电脑屏幕显示。实验验证远程控制系统及信号传输数据链切实可行,可在电脑上远程视频察看库房病案存储状况,确保病案安全。
关键词:病案安全;PLC;机器人;物联网;数据链
中图分类号:TP274 文献标志码:A 文章编号:2095-2945(2024)24-0023-04
Abstract: A robot for remote inspection of medical records in a warehouse for signs of mold, insect infestation, and water seepage is developed. The robot adopts the form of four-wheel walking, and the two rear wheels are driven by two stepper motors respectively. A vertical lifting screw is installed on the robot, a horizontal telescopic screw is installed on the slider, a barrel-shaped medical record examination camera is installed on the horizontal screw slider, and both screws are driven by stepper motors. another two 360° spherical cameras ensure that the robot walks without blind areas. This paper designs the HMI of the user's mobile phone, and one needs to click the button on the HMI, send instructions to the PLC on the robot through the data link of the Internet of things-4G-4G gateway, and control the robot to move the medical record inspection camera to the inspection position. The videos of the three cameras are transmitted to the user's computer screen through another 4G-Internet of things data link. The experimental results show that the remote control system and signal transmission data chain are feasible, and the storage status of medical records can be viewed remotely on the computer to ensure the safety of medical records.
Keywords: medical record security; PLC; robot; Internet of things; data link
目前病案有2种形式:纸质病案、无纸化电子病案。多数医院是2种病案形式并存,即使纸质病案扫描数字化后,也保留纸质病案[1]。依据《医疗机构病历管理规定》要求,医院必须保留患者病案30年。一个综合三甲医院,年住院病人超过10万人次,积累病案数量庞大,院区难有足够库房,所以常把病案异地存储或者外包给第三方公司存储,医院需定期派人去库房检查病案是否霉变及虫害侵袭,或者库房是否出现渗水等有害事件,病案存储管理技术措施有待提高。因此本文拟研发一款远程视频巡查病案库房机器人,可以在医院办公室电脑远程视频察看库房内病案存储完好状况及库房状况。
1 机械结构与控制及信号传输系统
1.1 机器人机械结构
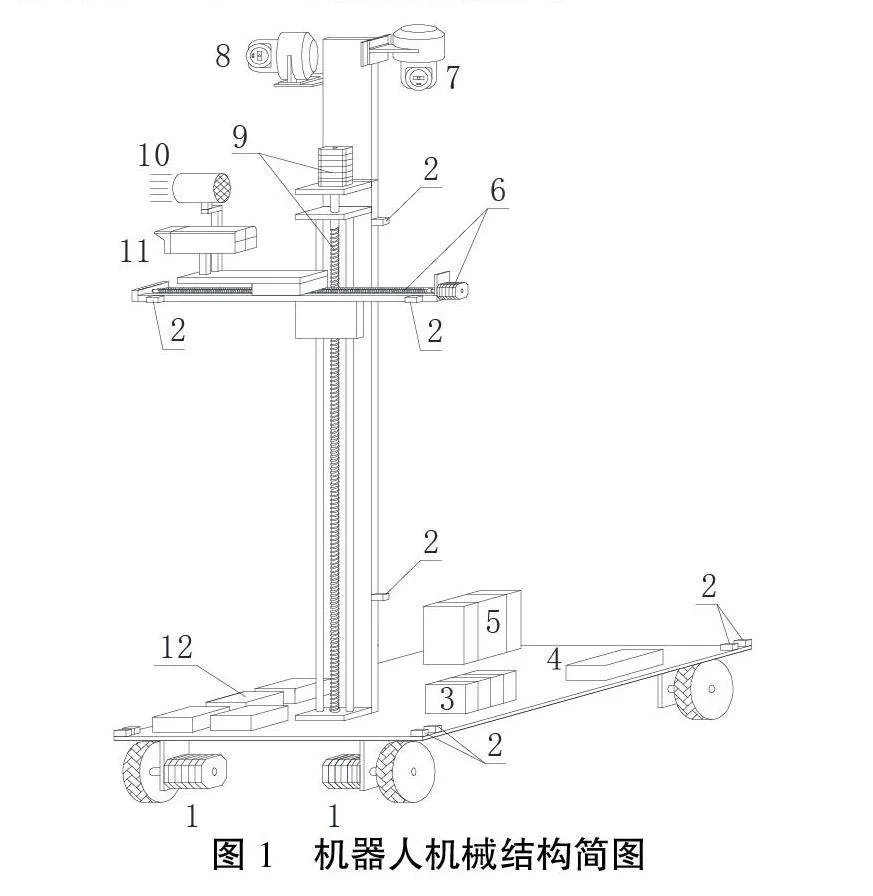
目前工业巡查机器人品种较多,可用于水下作业[2-3]、管道内作业[4]、高空作业[5]及库房巡查[6]等,机械结构[7]与控制方式[8]因使用场合不同而存在差异。根据病案库房结构特点及主要任务是视频巡查病案霉变痕迹、虫害痕迹,以及库房地板、墙壁、天花板渗水痕迹,采用机器人机械结构如图1所示。
机器人采用四轮行走结构,2个后轮分别由单独的步进电机1驱动,2个后轮转速相同,可实现直行前进或后退;2个后轮转速不同,可以实现转向移动。4G球形摄像机7与8可360°转动,保证行走无盲区及拍摄到地板、天花板及墙壁面。步进电机驱动的垂直升降丝杆套件9安装在机器人底板上。步进电机驱动的水平伸缩丝杆套件6安装在升降丝杆的滑块上,跟随升降丝杆上升或下降。4G筒形病案摄像机11安装在水平丝杆的滑块上,随水平丝杆的运动实现伸出或后缩。照明灯10安装在摄像机旁边,照射到病案上让视频更清晰。丝杆滑块移动到端部位置或者机器人接近障碍物,会触发限位传感器2。4台步进电机分别由4个驱动器12驱动,电池5提供电力,4G无线网关4及可编程序控制器PLC 3安装在底板上。
1.2 控制及信号传输系统
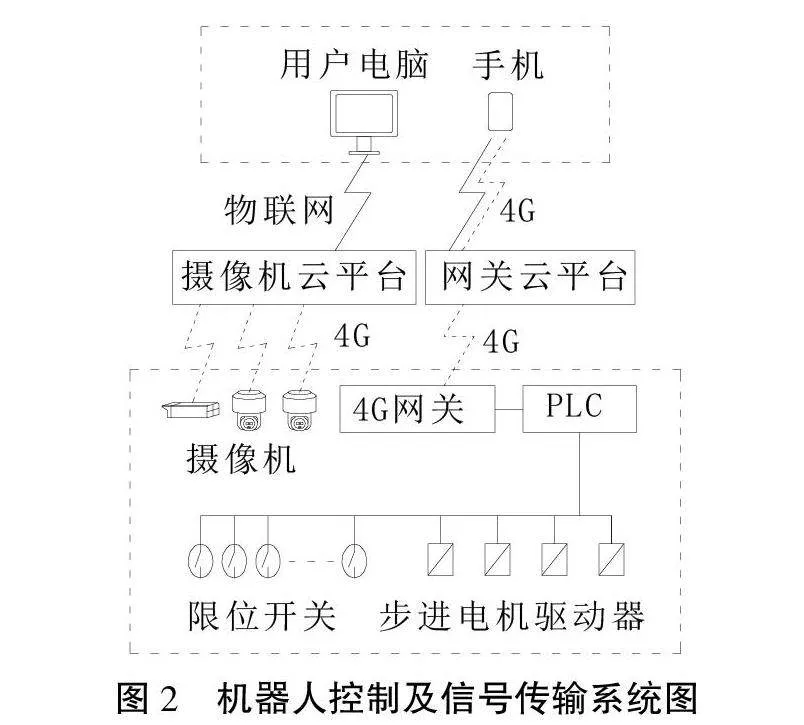
机器人远程控制及信号传输系统如图2所示,特点是有2条信号数据链:3台摄像机视频信号通过“4G-摄像机云平台-物联网”数据链进入用户电脑屏幕播放,摄像机7与8是360°全景摄像机,其镜头方向在电脑端设定,通过这条数据链直接向摄像机发送镜头转向指令;机器人控制信号则是从用户手机发出,通过另一条“4G或物联网-网关云平台-4G-4G网关”数据链进入PLC,控制机器人完成各种操作,同时机器人的运行参数也通过这条数据链反馈到手机。上述2条数据链双向传输信号。电脑屏幕主要负责视频显示,手机屏幕主要负责机器人控制,这样设置的优点是电脑屏幕大,可以清晰察看病案霉变痕迹、虫害痕迹以及库房地板、墙壁、天花板渗水痕迹等库房状况。
PLC是控制系统的核心,PLC依据程序及用户指令将控制信号输入4台步进电机驱动器,从而控制步进电机的转速及转动方向,实现机器人的行走控制以及病案摄像机的升降与左右伸缩,把摄像机移动到需要的位置。12个限位传感器与PLC的输入端相连,触发限位传感器会激发PLC启动保护程序,防止机器人超限运动从而保证作业安全。
2 控制及信号传输试验系统的建立
机器人的机械结构显然是可行的,但是PLC控制程序、手机上的人机界面HMI涉及的部件多,控制信号及视频信号传输数据链牵涉到第三方物联网及云平台,所以需要在实验室建立控制与信号传输试验系统并测试,以检验控制程序的可靠性、信号传输的畅顺性。
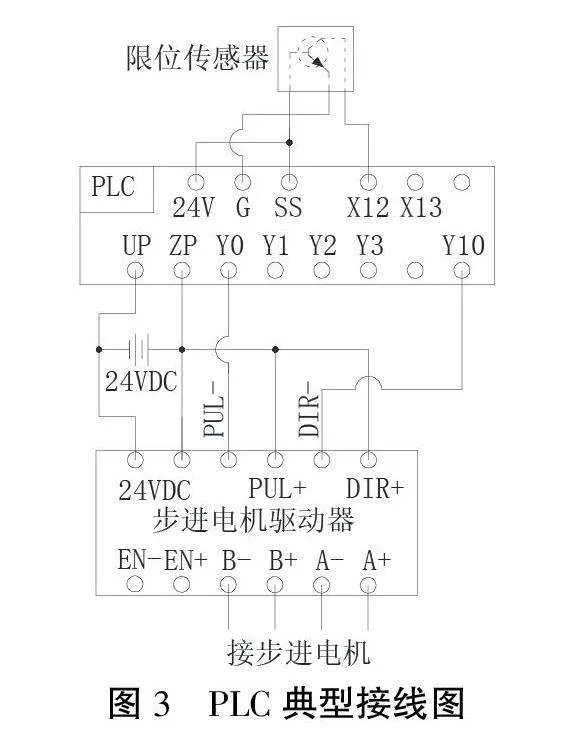
控制与信号试验系统主要硬件是:①某型号PLC,16路开关量输入,16路晶体管输出,485/R232通信接口;②某型号4G无线网关,兼有WAN/LAN口,其485/ R232通信接口具有与PLC交换数据功能;③2台机器人行走步进电机及其驱动器,步进电机型号是42BYGHxxxx,驱动器型号是TB6xxx;④2套包含步进电机的双光轴滚珠丝杆,长度为600 mm,型号GGPxx,一套垂直安装,一套水平安装,步进电机型号是57HSxxxx,驱动器型号是DM5xx;⑤3台某厂商网络摄像机,其中2台为360°全景摄像;⑥一个24 V DC开关电源及12个电容式限位传感器。PLC与步进电机驱动器、限位传感器的典型连接如图3所示。PLC与4G网关的连接采用串口RS232,对4G网关及PLC均设置串口通信波特率为9 600 bps,即可实现PLC与网关之间数据交换。
3 PLC控制程序及HMI的编写
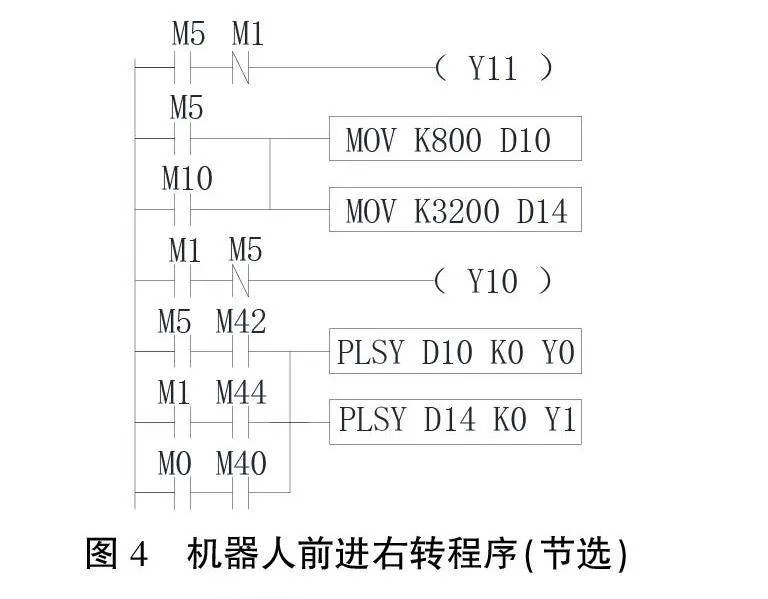
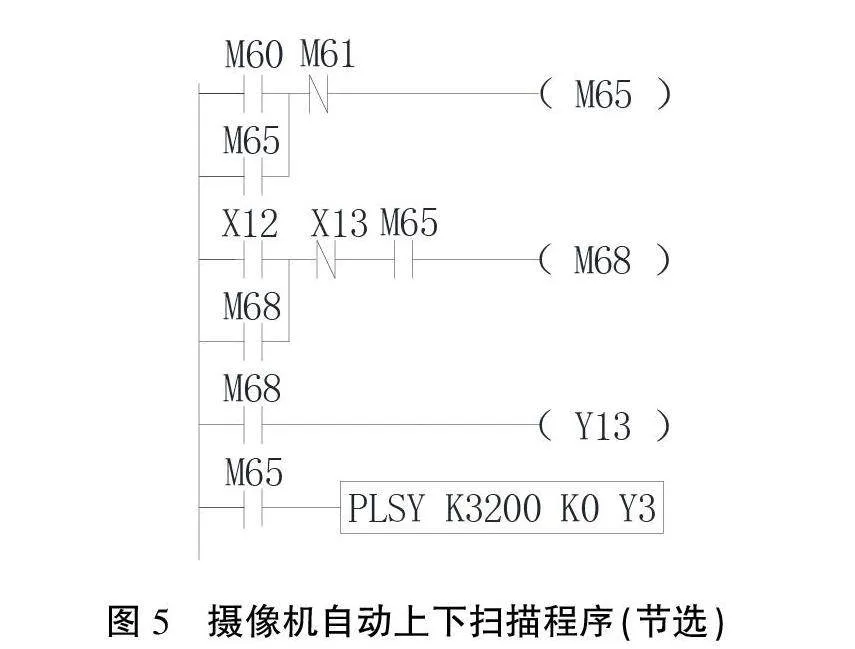
PLC程序以梯形图形式编制,使用脉冲输出命令PLSY输出步进电机转速脉冲。机器人前进右转的控制程序如图4所示,Y0信号驱动右后轮,Y1信号驱动左后轮,左后轮转速是右后轮四倍,实现向右转向。病案摄像机上下自动扫描控制程序如图5所示,Y3信号驱动垂直丝杆步进电机,X12、X13分别是垂直丝杆上端、下端限位传感器,触发X12、X13就会使步进电机反方向转动,从而实现摄像机自动上下扫描病案。图4与图5中的其他符号说明如下:Y10、Y11及Y13是步进电机反向转动使能信号,M0、M1、M5、M10、M60及M61对应用户手机HMI上的操作按钮(图6),其他M继电器是辅助继电器。
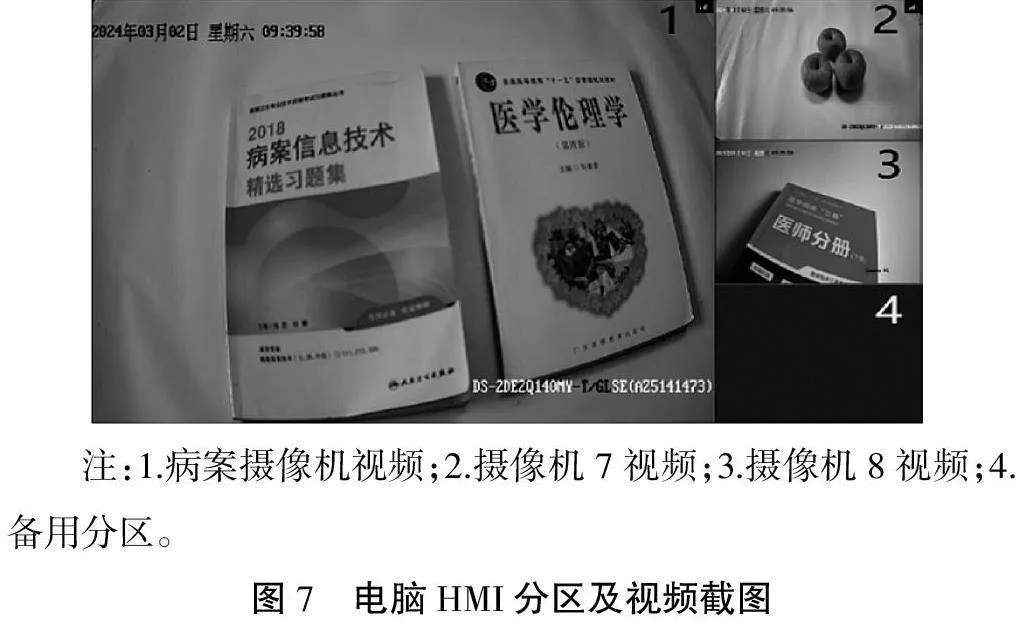
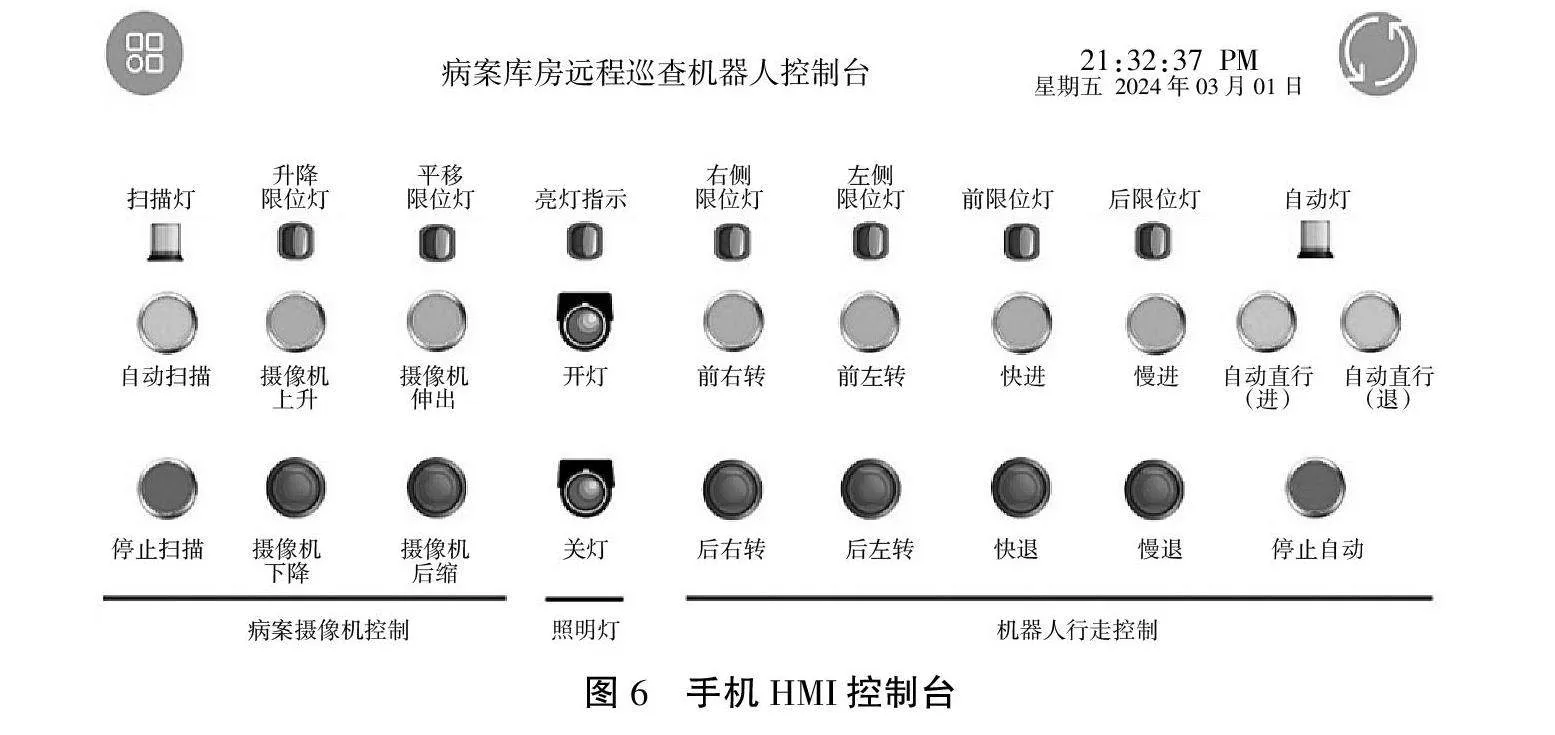
人机界面HMI是用户与机器人交流的操作平台,共有2个:一个是用户电脑屏幕HMI,负责显示病案察看视频、库房状况视频、机器人周边视频及操控摄像机7与8的镜头方向,另一个是用户手机HMI,负责操控机器人的前进、后退、转向以及病案摄像机11的升降、左右伸缩,这2个HMI都是在硬件厂商提供的框架软件基础上二次开发编写。手机HMI如图6所示,包含一系列按钮及机器人运行状态指示灯;通过编制手机小程序建立HMI与4G网关的通信,从而实现HMI按钮指令可以上传到机器人上的PLC,进而控制机器人运动及病案摄像机运动;同时机器人运行状态也可以反馈到手机HMI。电脑屏幕HMI视频播放分区如图7所示,每个区域播放一台摄像机视频,预留一个小区备用,各个分区的视频可以根据需要调换,例如,如果要观察病案完好状况,就把病案摄像机视频调到大区域播放以方便察看。
4 试验结果
机器人运动控制方面,打开手机上的小程序,调出手机HMI控制台,如图6所示,按压自动扫瞄按钮,垂直丝杆滑块可以上下循环运动,触发升降方向切换的是垂直丝杆上、下端限位传感器信号。按压自动直行按钮,机器人2个后轮同时、同转速正转或反转,触发转动方向切换的是机器人底板前、后限位传感器信号。这个试验结果表明病案摄像机可以自动扫描堆放在置物架上的病案。按压右转前进按钮,左驱动轮转速就是右轮的4倍,可实现向右前方转向。委托不同人员操作测试,随机按压HMI上面的按钮,步进电机的反应与控制台的标注一致,手机HMI与PLC控制程序之间存在唯一对应关系,机器人按规定的指令工作,不存在按钮之间的冲突现象,限位传感器起到限位作用,控制信息传输稳定。视频查看方面,凭账号登陆电脑HMI,即可以看到3个摄像机实时视频,如图7所示,视频传输清晰、视频滞后不明显。
5 结束语
通过试验测试,验证了机器人的运动控制系统、4G+云平台+物联网信号传输数据链、PLC控制程序、HMI等设计正确,而机械构造所需的部件,其制造技术已很成熟,因而病案库房远程视频巡查机器人技术上可行,可在办公室远程查看库房中病案存储状况,提高了病案库房管理技术水平。目前的研发工作强调电脑屏幕负责显示3个摄像机视频,手机负责控制机器人运动。事实上,在电脑上也可以同时控制机器人运动、手机也可以显示视频,但视频显示面积偏小,不利于观察病案状况,今后可深入探讨此问题。
参考文献:
[1] 刘维,卢璟霖,杨栩超.目前我国病案存储模式现状分析[J].中国病案,2021,22(5):5-7.
[2] 卢文,何佳兵.水下监测与清污机器人的研究与设计[J].科技创新与应用,2022,12(20):78-81.
[3] 管朝鹏,吴东栋,桂亮.安全壳内置换料水箱检查机器人控制系统设计[J].核动力工程,2023,44(4):209-213.
[4] 蒲小虎,杜青,王小东.水下管道巡检机器人控制系统设计[J].无线互联科技,2022,19(21):76-78.
[5] 杜裕,王贤彬,徐达梁,等.风电叶片视频检查机器人的研制[J].现代制造技术与装备,2020,56(12):16-19.
[6] 曹巍,周治宇,刘辉,等.智能巡检机器人在地铁检修库内的可行性应用[J].科技创新与应用,2023,13(23):54-57.
[7] 蓝宇,陈熹,徐忠阳,等.一种履足复合式六足机器人:ZL20232
1193126.6[P].2023-10-27.
[8] 晏华成,宋国翠,蔡文鑫.基于RFID和磁导航的AGV小车S7-1200PLC控制系统设计[J].科技创新与应用,2024,14(6):34-37.