
车载通信总线带宽资源的控制方法
2024-07-30 00:00:00李广大宋菊宋明昊
汽车电器 2024年7期









收稿日期:2024-05-29
作者简介
李广大(1988—),男,硕士,电气架构工程师,研究方向为整车网络架构设计、整车电气功能定义及分配、整车信息交互等。
【摘 要】CAN总线在汽车通信网络中应用广泛且占据着重要地位,但随着电气类功能,尤其智驾和智舱域功能的不断丰富,总线上需要交互的信息量越来越大,总线带宽资源也因此越来越紧张,负载率越来越高。过高的总线负载率将影响信号传输的实时性和稳定性,因此,在网络架构设计之初进行网络带宽资源的管控至关重要,这将影响网络架构的平台化设计和后续功能的拓展。本文从信号层面、总线层面和拓扑层面介绍通信总线的负载率管控方案。
【关键词】带宽;管控;信号;CAN总线;拓扑
中图分类号:U463.7 文献标识码:A 文章编号:1003-8639( 2024 )07-0032-04
Control Methods of Vehicle Communication Network Bandwidth
LI Guangda1,SONG Ju2,SONG Minghao3
(1.Innovation and R&D Center of JUNEYAO Auto Co.,Ltd.,Shanghai 201803;2.LongShine Technology Group Co.,Ltd.,Jinan 250001;3.Shandong Transport Vocational College,Weifang 261206,China)
【Abstract】The CAN bus is widely used plays an important role in vehicle Communication Network. But with the development and diversification of electrical functions,especially in intelligent cockpit and ADAS fields,signals transmitted on bus becomes more and more,which will result in heavier busload. The high busload will affect the real-time and stability performance of signal transmission,so it's very important to control the network bandwidth resources in the beginning of the project,which will have great influence on the design of platform and new functions.This paper introduces the load ratio control scheme of communication bus from signal level,bus level and topology level.
【Key words】bandwidth;control;signal;CAN bus;topology
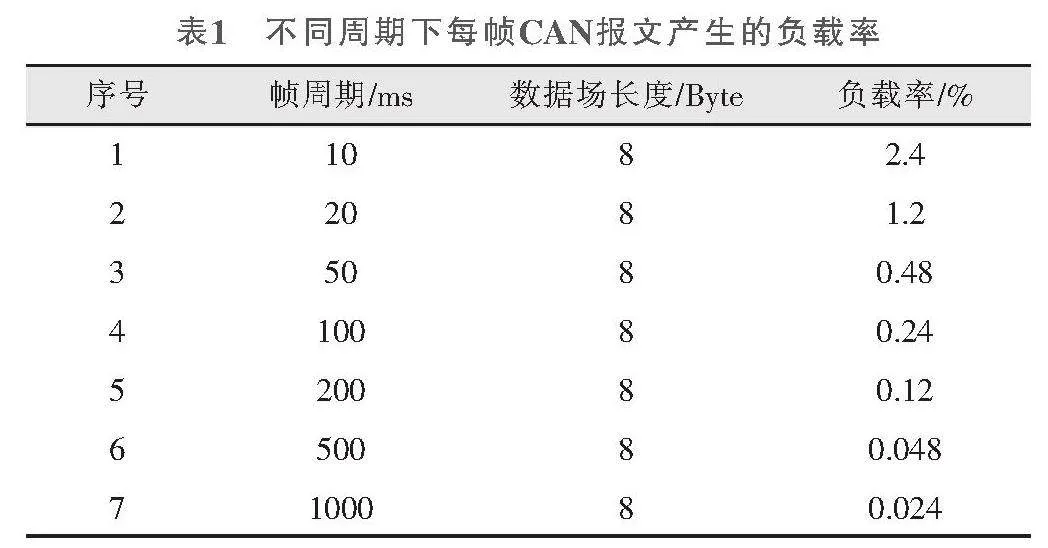
目前在大多数车型的通信网络中,CAN总线仍然扮演着重要的角色,常用的高速CAN数据场通信速率为500kb/s,不同周期下每帧报文能产生的负载率如表1所示。根据业内实践,为了保证信号的传输性能,一般CAN总线负载率应控制在50%以下[1]。
在传统燃油车上,整车信号数量一般不超过2000条,普通的CAN主干通信网络尚且可以勉强使用。然而随着智能驾驶、智能座舱等功能的不断丰富和升级,整车信息交互量急剧增长,整车信号数量很容易便会突破3500条。在此情况下,车载总线负载率急剧上升,甚至可达70%以上。越高的总线负载率意味着需要同时发送的数据越多,会引起网络堵塞,低优先级节点发生通信延迟的概率越大,甚至会丢失报文,从而导致整车性能下降甚至功能异常而引发事故。因此,对整车通信带宽资源进行管控是十分必要的,本文将从信号层面、总线层面和拓扑层面介绍通信总线的负载率管控方案。
1 信号层面
1.1 管控信号帧数量
合理管控信号帧的数量,尤其短周期的帧数,对降低总线负载有显著效果。
1)平台化预留的帧,在项目上如果不需使用,则可以删除或屏蔽。如DCT变速器专用的信号、电子手刹EPB专用的信号等,见表2。但这要求在设计前期就要将特定用途的信号统一进行分配和打包。注:下文所有关于负载率的计算都是基于CAN总线。
2)不同帧中的信号,合并到同一帧中。若同一控制器发送某些帧中包含的信号数量过少,导致帧中有大量空余的位,则可以考虑将这些帧合并,若这些帧的周期不同,则可以都合并到短周期帧中,如表3所示。
中央网关转发到某个网段的多个帧,也可以采用同样的方法进行合并,如表4所示。若帧中带有RC、CRC、Checksum等校验信号,由于对信号的完整性要求较高,则不适合采用合并再转发的策略。
1.2 合理选择报文的发送方式
1.2.1 采用事件型报文
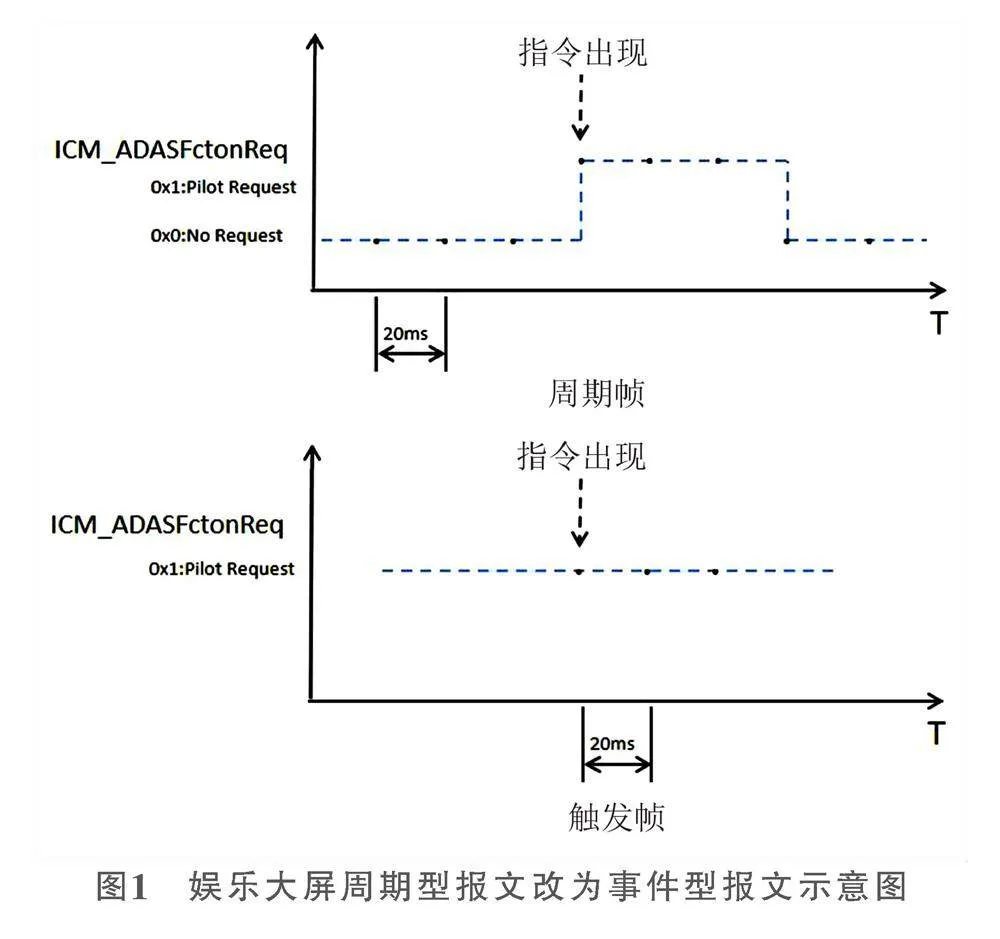
没有事件发生时总线上不出现相应的报文,只有当事件发生时才发送。图1为娱乐大屏由通过周期型报文发送指令改为通过事件型报文发送示意图。如远程控制指令,只有在手机端操作APP时,远程通信模块T-Box才会将相应的操作指令信号下发到车内总线上。或娱乐大屏上的某些开关、设置项,只有点击的时候才下发指令信号,以此避免无效占用总线带宽资源的情况。周期型报文改为事件型报文效果如表5所示。
1.2.2 采用周期事件帧
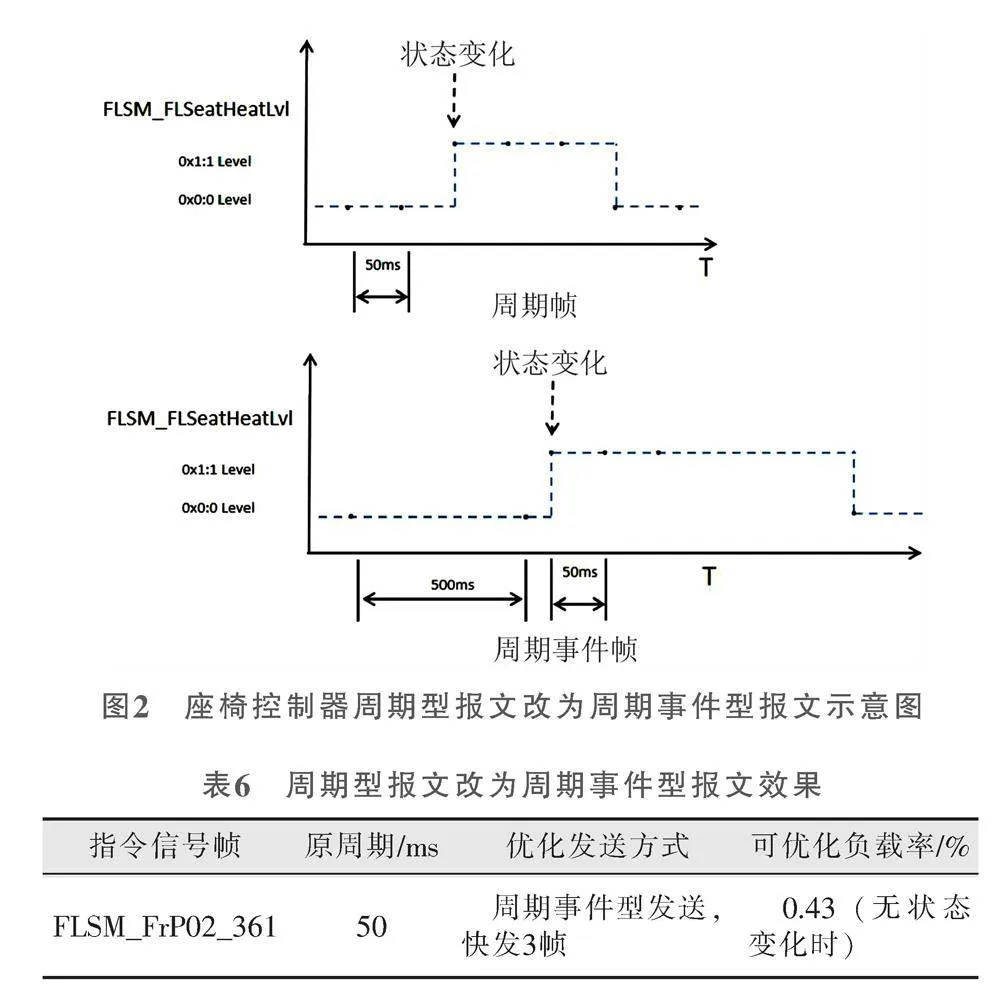
针对某些请求、指令或状态类信号,可以采用周期事件帧,如门开关状态、座椅占位状态信号等,当状态跳变时,信号帧连续快发若干帧(如3帧)以便其它控制器能够快速获取状态并执行逻辑,然后恢复长周期发送以节约总线带宽资源。座椅控制器由通过周期型报文发送状态改为通过周期事件型报文发送,如图2所示,负载优化效果如表6所示。
1.2.3 功能激活时发送
对于某些特定情况下才出现的场景,如倒车雷达、360全景影像等,则可以使相应的控制器处于工作场景时再外发相应的信号,如倒车雷达的控制器可以使用倒车灯的供电,这样当进入倒车场景时倒车雷达的控制器才开始工作并外发信号,而在正常行驶时是不会外发的,从而达到释放总线带宽资源的目的。倒车雷达控制器由上电即发送报文改为进入倒车场景时才发送,如图3所示,负载优化效果如表7所示。需要注意的是,信号打包时要尽量将需要采用同样发送方式的信号一起打包。
1.3 信号帧周期管控
在整车网络信号接口设计之初,就需要对信号帧周期进行管控,在满足性能要求的原则下,尽量使用长周期的帧。在实施项目时,可参考如下周期设计原则。
通过娱乐大屏进行开关或设置的功能所对应的信号,如灯光、车窗、雨刮、后视镜、座椅控制等,采用100ms及以上的周期发送;需要车机显示状态的车身类功能所对应的信号,如门开关状态、灯光开关状态、车窗状态等,采用100ms及以上的周期发送;动力域、底盘域和智驾域等,根据对性能的影响程度,可采用10ms、20ms、50ms、100ms等周期发送。
在项目设计之初就要严格控制短周期帧的使用数量,以便为后续车型的升级和功能的拓展预留足够的总线带宽资源,比如将目标设定为每个控制器在每个网段上发送不超过4帧10ms的报文。在最新的项目中,整车通过管控共有17帧10ms的报文,极大地保护了总线带宽资源。
2 总线层面
2.1 扩展总线数量
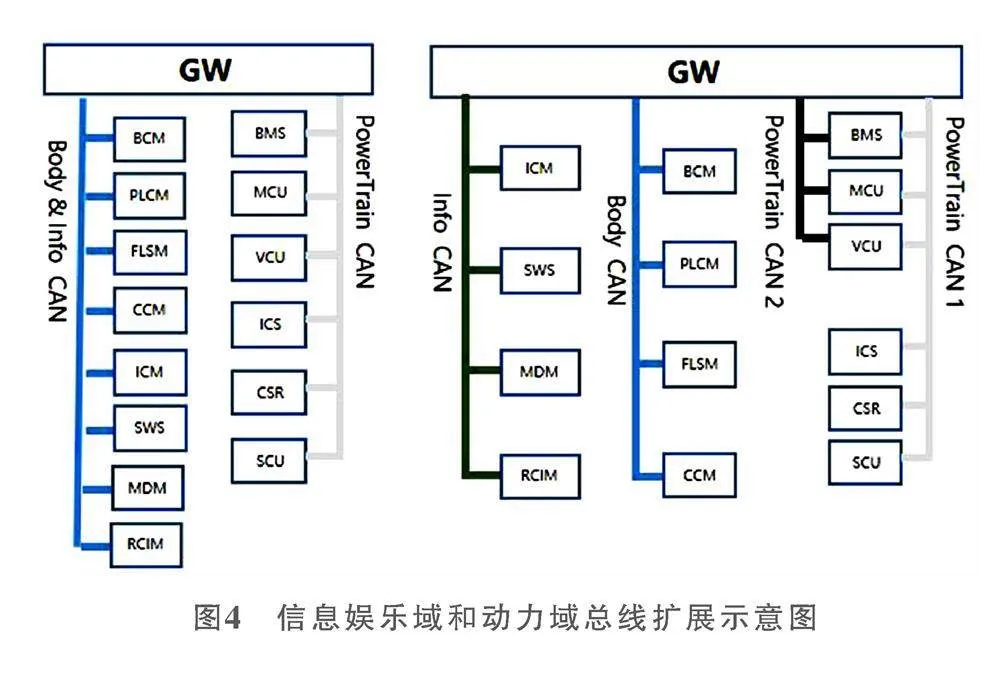
随着整车智能化程度不断提高,车身电子、信息娱乐相关的功能不断丰富,车身域和信息娱乐域的信号增长非常迅速,由此导致车身和信息娱乐网段的负载率居高不下,这往往也是在实际项目中面临的巨大挑战。面对这种情况,一种比较好的解决方案是将车身娱乐网段分开,分为车身网段和信息娱乐网段,划分原则为信息娱乐相关的控制器,如前座舱域控、后信息娱乐模块、方向盘开关模块等放在信息娱乐网段,车身控制相关的控制器如车身控制器、座椅控制器及尾门控制器等放在车身网段。同样,动力网段由于控制器数量较多且短周期帧较多,也可以将动力网段分为2个,从而进行信号分流,达到优化网络负载的目的。信息娱乐域和动力域总线扩展示意如图4所示。
2.2 更改总线类型
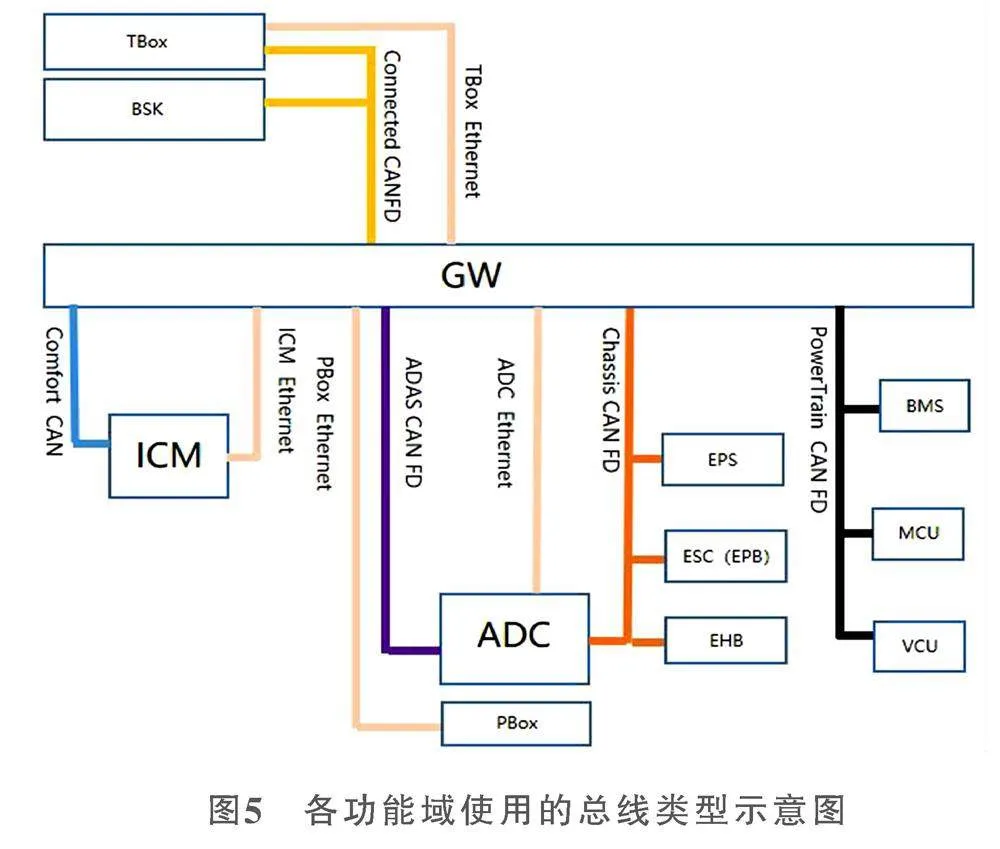
当单一类型的总线因其本身固有的属性无法提供更高的通信带宽时,可考虑同时使用多种类型的总线提供更多的带宽资源,如CAN、CANFD、以太网等。在使用过程中,不同的功能域根据其信号交互特点可分别采用不同的总线类型,动力、底盘、智驾、智联(蓝牙模块、远程通信模块)域因其信号交互量大,且实时性要求较高,可采用CANFD作为主干网络来提供更高的带宽[2]。
智能座舱与智驾之间的HMI交互信息,如目标物、车道线等,如果通过CAN/CANFD传输,则会大量占用总线资源,因此在设计之初便可以要求智能座舱和智驾域控完成以太网相关的开发,一方面用于刷新,一方面使用以太网来分流CAN/CANFD总线上的信号。同理,高阶智驾的高精定位控制器与远程通信模块T-Box之间的位置交互信息也可以使用以太网进行传输。相应的总线类型示意如图5所示,负载优化效果如表8所示。
从表8可以看出,将大量同质化、短周期的信息转为通过带宽更高的以太网进行传输,可以达到很好的负载管控效果。
3 网络拓扑层面
3.1 私有网络
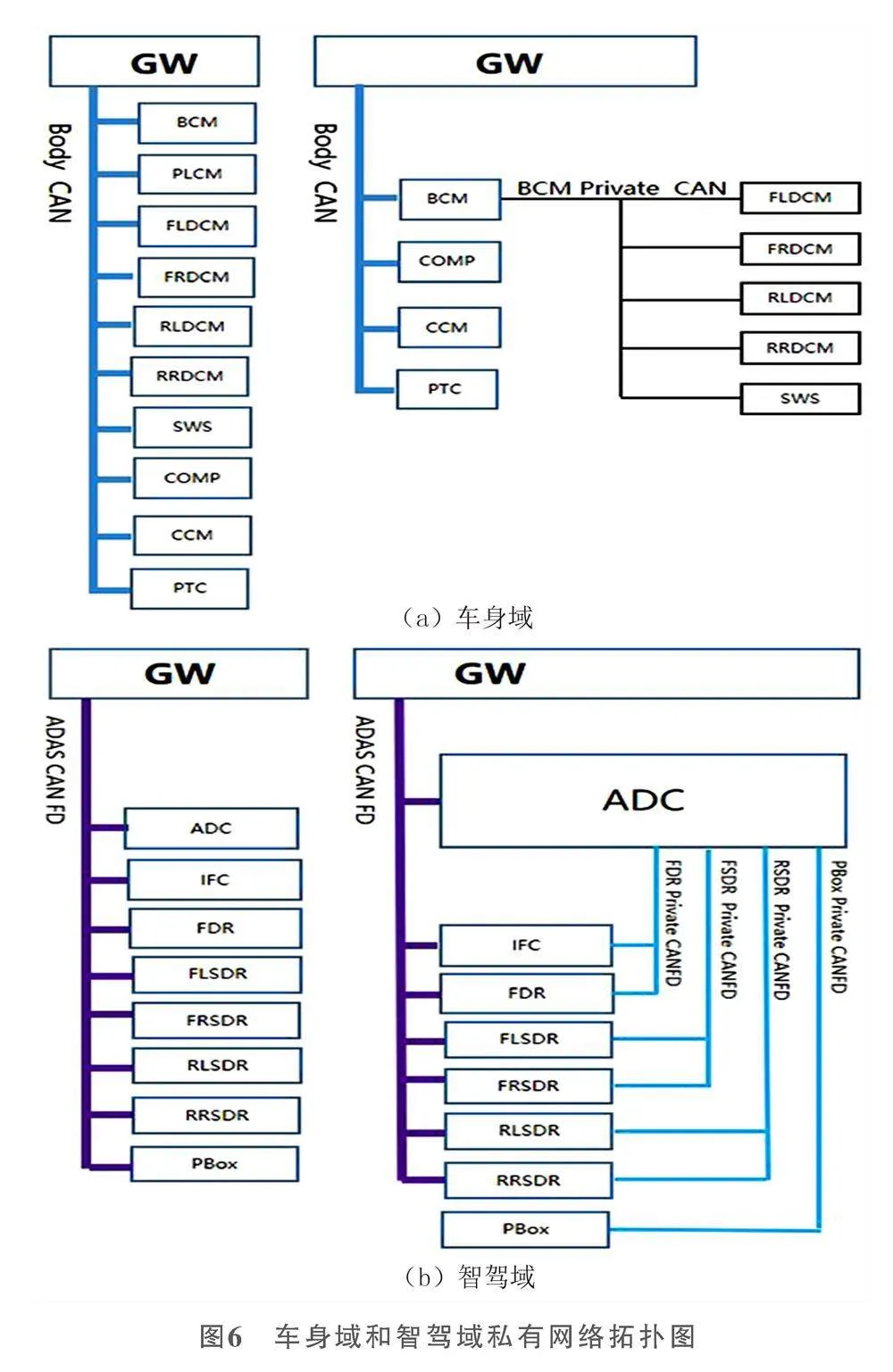
某些网段上的控制器过多时,可通过建立私有网络,减少其对公共网络的影响。如拥有多个小控制器(门模块、组合开关模块、氛围灯模块等)的车身网段,小控制器主要同本网段内的车身控制器BCM进行交互,对外交互信息比较少,因此可以通过主控制器如BCM进行对外交互。其网络拓扑如图6所示,网络负载优化效果如表9所示。同样,对于智驾域,其雷达、摄像头等数量较多,且它们之间的信息交互主要集中在内部,因此智驾域也可以组建私有网络,通过私有网络传输内部交互的信息,剩余少量的对外交互信息可以通过公有网络(ADAS CANFD)进行交互。
3.2 跨接网段
对于需要和多个域进行交互的控制器,如电子稳定系统(ESC)和底盘域以及动力域的信息交互量比较大,且为了保证驾驶性能,使用的信号不仅数量多,帧周期也要求比较短。基于此,则可以将电子稳定系统设计为同时跨接底盘网段和动力网段,并且它们之间直接交互的信息可在其共有网段——动力网段上进行传输,无需直接交互的信息可以通过底盘网段通过网关进行传输,以此实现信号的合理分配,从而进一步实现对总线负载率的管控。同理,智驾域同底盘域的交互信息量也比较大,也可以采用相同的方式进行跨接和分配信号[3]。如图7、表10所示。
需要注意的是,使用跨接网段进行信号分流时,要根据信号的收发关系、控制器所在网段的负载和潜在的需求进行分配。如果控制器所在的某个网段不需要某些帧的信息,则这些信息就可以在另一个网段进行传递。
4 总结
本文从信号层面、总线层面和网络拓扑层面结合项目实践系统化地介绍了几种车载总线带宽资源的管控方法。
在项目实施过程中,一般要根据整车的功能规划、控制器的选型、成本等因素综合使用上述多种方式对总线的带宽资源进行管控,从而达到较好的效果。在以往的多个项目中,以上方法也都进行过研究、实践和量产,在满足平台化的同时有效管控总线带宽资源,使整车网络信号能够稳定传输。
根据项目实践并考虑到可实时性,不同的域适用的方法推荐见表11。针对变化较频繁的车身域和智舱域,可选择采用多种方法进行管控。而对于相对稳定的动力域和底盘域,在平台化控制好后,在具体项目中则无需再频繁进行优化。
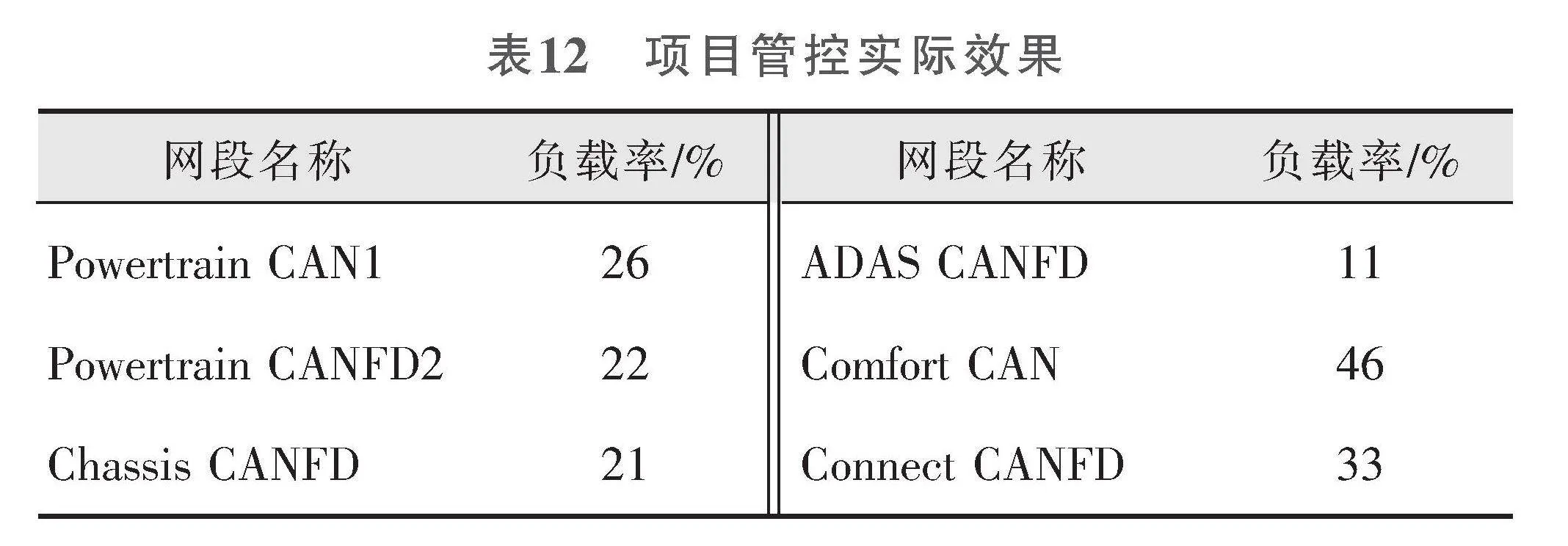
在实际项目中,通过在项目之初进行网络架构设计时采用上述方法进行管控,将信号进行预打包评估,优化后再正式打包,各个网段可以得到比较理想的总线负载率,详见表12。
参考文献:
[1] 蒂洛·施特赖歇特. 汽车电子/电气架构-实时系统的建模与评价[M]. 北京:机械工业出版社,2017.
[2] 赵公旗,冯宝存,赵红玉,等. 浅谈车载总线负载对网络传输影响及优化[J]. 汽车电器,2015(12):22-24.
[3] 张博君. 浅析CAN总线双子网拓扑优化结构[J]. 火控雷达技术,2009(6):28-32.
(编辑 凌 波)
