
基于视觉信息的自动化物品分类与分拣系统设计
2024-06-27 12:21:26刘文博
信息系统工程 2024年6期
刘文博
摘要:基于分拣线物品的视觉信息,以水果分拣为基础,利用K最近邻算法分类器对苹果、橙子、柠檬三种水果进行物品识别分类,设计了一个采用PLC自动化生产线的物件识别与分拣系统。该系统主要由可编程逻辑控制器、电动机、变频器、视觉传感器和气缸组成,最终实现对分拣线物品的自动分拣。该系统能够极大提高物品分拣效率,具有广泛的应用价值和实用领域。
关键词:视觉信息;物品分类;自动分拣
一、前言
传统的物品分拣流水线通常采用人工分拣的方式,但人为因素如情绪、疲劳和身体状况等的影响导致分类效果差、分类效率低等问题。而且,随着社会发展,用工成本不断上升,给企业带来不小的负担[1-3]。随着现代电子信息技术的发展,以工业自动化为代表的自动化分拣流水线应运而生,该系统广泛应用于物流、快递、零件制造和交通运输等行业,成为当代工业自动化中不可或缺的重要组成部分。物件分拣即是从混杂在一条流水线上的各种物件中识别并筛选出特定分类的物品,将不同物品进行分离。分拣流水线自动系统能够在众多物件中识别并分拣出相应类别的物品,提高生产效率,并降低人工成本。因此,采用目前广泛使用的PLC控制技术设计控制、识别和分拣系统对此应用具有高效的作用[4-5]。
二、系统总体功能设计
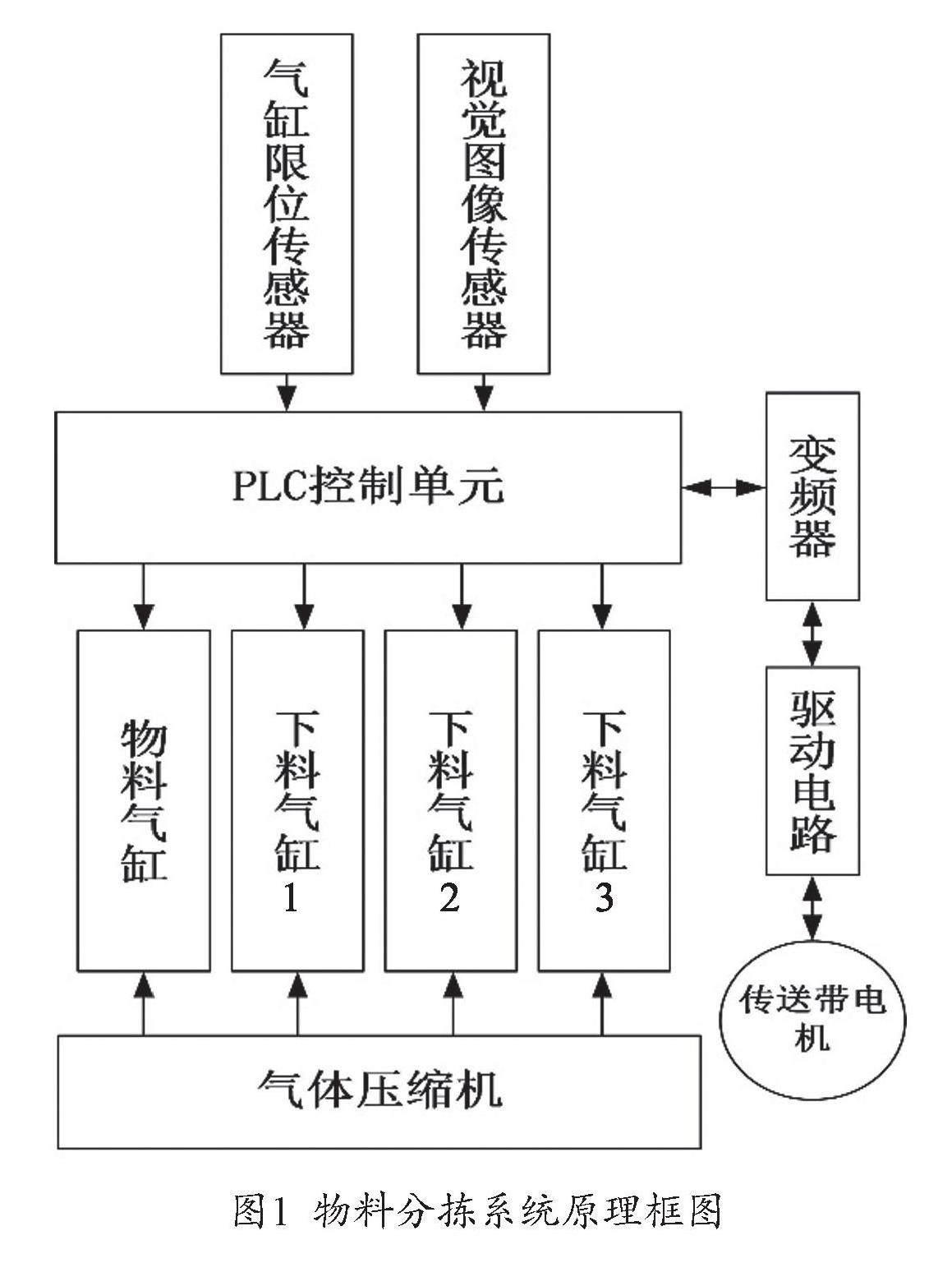
基于视觉信息的现代智能物料分拣系统主要由视觉、气动和电气三部分组成。 视觉部分主要由视觉传感器模块负责对待分拣物品进行图像信息采集,并对采集的图像数据进行处理以形成特征信息。气动部分的主要作用是为气动装置提供动力来源,主要由气体压缩机、气动减压器、气缸和气压指示等部件组成。电气部分包括电源、变频器、传送带、电机、电磁阀、磁性开关和继电器模块等组件,其全部工作过程由PLC总控,实现对物料分拣全过程的监控[6]。整体功能原理框图如图1所示。
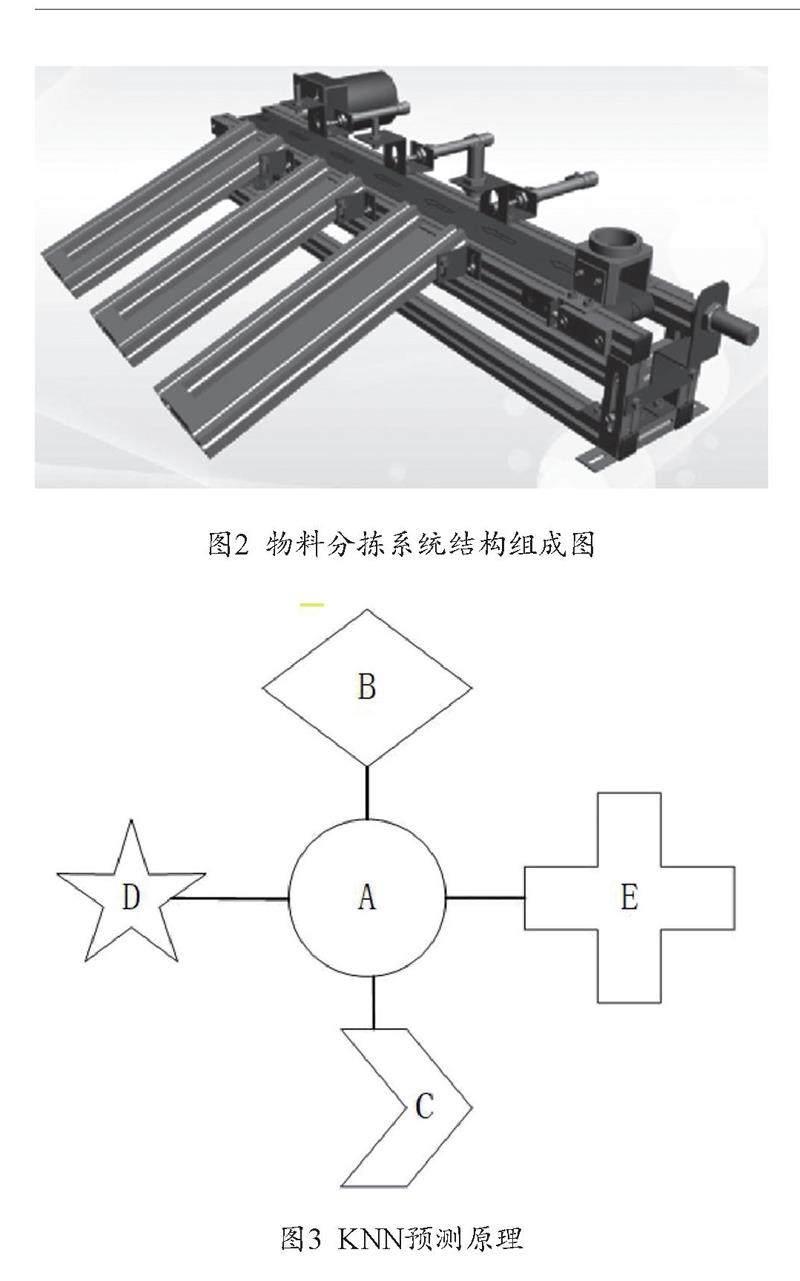
本系统采用三菱FX2N-48MR作为可编程逻辑控制器。通过PLC主控制器的模拟量输入输出模块,对三菱FR-E740变频器的频率信号进行采集和输出,以实时监测当前流水线的运行速度。当料仓光电传感器检测到有物料时,系统启动视觉传感器模块对待分拣物料进行图像采集和特征提取。根据之前的训练结果,系统利用所采集的物料对象的相关特征进行分类,并将分类结果传输给PLC输入单元。一旦PLC输入单元接收到视觉传感器的分类信号,系统会启动传送带运动到相应的落料口,并最终通过控制气动装置对物料进行分拣,将物料推入对应的物料收集容器中,如图2所示。
三、K最近邻算法分类器
K最近邻算法(KNN)是一种常用于数据挖掘分类的技术方法之一。其主要原理是根据数据特征将不同数据进行坐标表示,对于具有类似数据特征的样本,其坐标位置会大致相近,而当已知某一待分类样本的数据特征表征之后,将其用坐标表示,它会在坐标轴上更靠近它所属样本区域,从而确定其所属样本。对于K最近邻,其中的K表示在空间坐标中最靠近待分类物品的已知样本标签的附近K个近邻样本,也就表明,对于同属一个样本集中的每个样本都可以用它邻域内最接近它的K个邻域样本特征来表征。KNN算法的主要思想是首先根据待分类样本的空间特征信息去选取与其最相邻的K个已知类别标签样本,如果最相邻的K个已知其分类标签的样本中主要都是某一类别样本,则该待分类样本也会属于这个类别的概率更大,它的样本特征也会更靠近其所属的类别特征空间区域内。KNN算法在确定分类决策上都是依据最邻近的K个已知类别的样本来分类待分样本最大概率所属的样本类别。KNN算法在类别决策时,主要根据其所属坐标周围有限的邻近样本,而不是靠判别类域的方法来确定所属类别,因此,对于交叉或者存在重叠区域较多的类域待分样本集而言,KNN算法较其他方法更能高效、准确地进行物品分类识别[7],KNN 算法基本预测原理如图3所示。
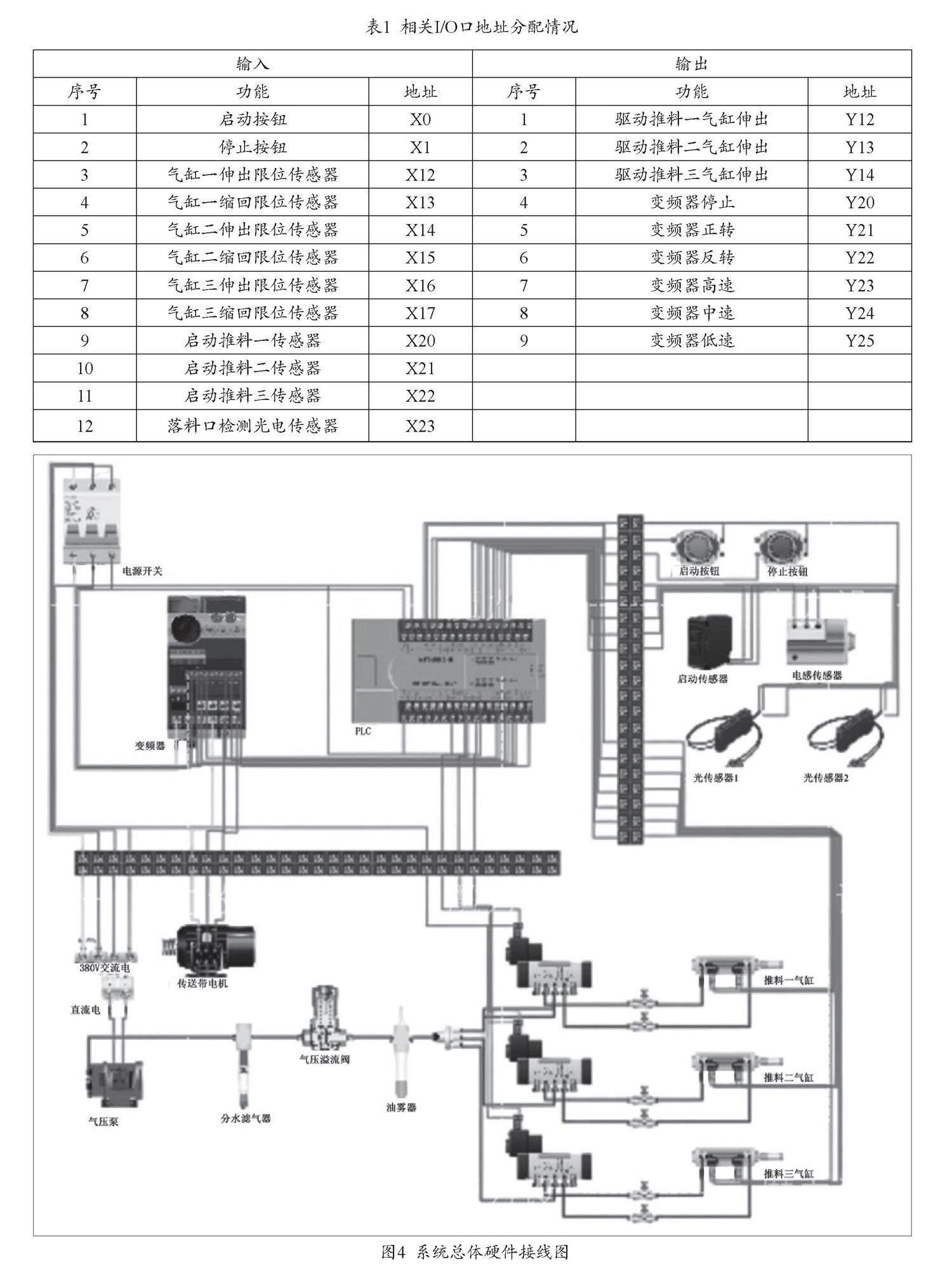
图3中,A为待分类样本,在其领域内分布4个已知物品标签的样本B、C、D、E,并且根据欧氏距离LAB 对于本系统待分类水果样本,采用的水果数据集由爱丁堡大学教授Iain Murray 所创[8]。在他的样本集中,存在很多种类的橙子、柠檬和苹果图像,并把它们的相关数据记录在表格中,然后由密歇根大学的一些学者将这些水果进行数据整理。在该数据集中,一共有59个水果和对应的的7个特征。 采用上述提到的KNN算法,将水果数据集中的70%作为训练样本,另外30%作为测试样本,编写了以下相关程序: from sklearn.neighbors import KNeighborsClassifier knn = KNeighborsClassifier() knn.fit(X_train, y_train) print('Accuracy of K-NN classifier on training set: {:.2f}' .format(knn.score(X_train, y_train))) print('Accuracy of K-NN classifier on test set: {:.2f}' .format(knn.score(X_test, y_test))) 最终经过测试,K最近邻算法分类器在本测试集中的准确率为97%。当然,如果需要,也可以自己制作相应的样本数据集,进行更多特征的提取,以提高水果样本分类精度。 四、硬件结构 本系统从硬件连线上输入主要涵盖启动停止相关按钮、三个气缸伸出缩回限位传感器、落料口检测光电传感器及启动三个推料传感器接口,输出主要包括驱动推料三个气缸伸出接口以及控制变频器停止、正转、反转和高中低速运转的相关接口。基于三菱FX2N-48MR对其I/O口的地址分配见表1。 结合以上I/O口地址,最终线路的整体硬件连接如图4所示。 总体硬件连接包括按钮与PLC的连接,传感器与PLC的连接、电磁阀与PLC的连接以及变频器与PLC的连接四部分。 五、软件设计 采用视觉信息的物料分拣系统主要工作流程如图5所示,当按下开始按钮后分拣系统开始工作。首先由料仓口的光纤传感器判断料仓此时是否有待分拣物料,当检测到料仓有物料后,料仓气缸会将待测物料推送至传送带上并启动安装在传送带出料口正上方的视觉传感器对物料进行图像采集并进行提取其相关图像特征,然后将所采集的待分拣物品根据其对应特征利用KNN算法进行分类,分类完成后再将分类信号通过对应接口传输给PLC,PLC启动分拣系统,通过传送带电机及变频器将分好类的物料通过传送带和气动装置最终推入相应的物品容器中,相关流程所使用的PLC程序如图6所示。 六、结语 本文研究了一种基于PLC控制平台和视觉传感器的水果分类系统。该系统利用视觉传感器对水果进行分类测试,并通过受变频器控制的传送带将其送至对应分类仓,最后利用气缸将其推入容器。通过软件编程,系统可以根据需求调整不同的物品,减少了人工分拣误差,提高了运行效率和安全性。整个系统具有设备操作灵活、集成度高、抗干扰能力强等特点,通过PLC加变频器的控制结合,大大简化了系统的硬件接线。同时,由于PLC系统的可扩展特点,分拣系统也具有便捷改造不同应用的优势,可以降低设备的不兼容性,使该分拣线控制系统具有较强的适应性和功能的可扩展性。 参考文献 [1]袁苑,谢凯.基于机器视觉的智能物料分拣系统设计[J].工业控制计算机,2022,35(07):44-45+48. [2]凌双明.智能视觉检测系统在物料分拣中的应用研究[J].山西电子技术,2022(03):77-80. [3]王祥傲,郭建勇,苏鹏,等.基于物联网和PLC的物料分拣码垛监控系统设计[J].衡水学院学报,2022,24(04):11-16+28. [4]廖耿斌.基于PLC的物料分拣远程监制系统[J].电子制作,2022,30(19):42-44+18. [5]孟亚男,张振怀,孟凡超.基于PLC的给料分拣自控系统[J].化工自动化及仪表,2022,49(03):351-353+361. [6]赵悦,莫莉,张阳.基于西门子PLC和WINCC组态的物料分拣控制系统的设计与仿真[J].成都大学学报(自然科学版),2021,40(04):384-389. [7]孙泰屹,勾进,何雅琴.基于改进KNN模型的城市道路事故持续时间预测[J].武汉理工大学学报(交通科学与工程版),2023,47(06):1030-1034. [8]Iain Murray. Fruit_Data with Colors[DB/OL].Edinburgh. [2023-08-24].https://github.com/susanli2016/Machine-Learning-with-Python/blob/master/fruit_data_with_colors.txt 作者单位:福建水利电力职业技术学院 ■ 责任编辑:王颖振、杨惠娟
