基于地下物流的港区集装箱转运技术研究
2024-06-21 19:02:48鲁斌张梦霞
物流科技 2024年10期
鲁斌 张梦霞
摘 要:我国港口集疏运存在瓶颈,运输效率较低。为实现港区集装箱的高效快速转运,文章提出一种基于地下物流的技术方案。该方案在港区内设置地下站点,通过地下主运输隧道连接至内陆货运站,实现海陆间的无缝连接。采用自动导向运输车,设置精密的车体连接结构、定位系统、运输控制系统,解决装载运输的关键技术难题。同时设计了高精度的装卸对位系统,保证地面吊机与地下车辆的精确对位。该技术方案可实现全天候的集装箱快速转运。该研究为我国港口提供了一种新的集疏运技术途径,具有重要的工程应用前景。
关键词:地下物流;集装箱转运;自动导向车;精确定位;运输控制
中图分类号:F540文献标志码:ADOI:10.13714/j.cnki.1002-3100.2024.10.013
Abstract: China's ports have bottlenecks in container handling and transportation, resulting in low efficiency. To achieve efficient and fast container transfer between ports, this study proposes an underground logistics-based technical solution. The solution sets up underground stations in the port area and connects them to inland freight stations through underground main transportation tunnels, realizing seamless sea-land connections. It adopts automated guided vehicles and sets up precise body connection structures, positioning systems, and transportation control systems to solve key technical challenges in loading and transportation. Meanwhile, a high-precision berthing system is designed to ensure accurate positioning between ground cranes and underground vehicles. This technical solution enables all-weather fast container transfer. This research provides a new technical approach for container handling and transportation in China's ports, and has important prospects for engineering applications.
Key words: underground logistics; container transfer; automated guided vehicle; precision positioning; transportation control
0 引 言
随着全球贸易方式的改变,集装箱作为现代化货物运输的主要载体,其运输量近十年来快速增长。我国沿海主要港口的集装箱吞吐量也日益增加,据统计,全国港口在2022年全年完成集装箱吞吐量3.0亿标准集装箱(Twenty-foot Equivalent Unit,TEU) [1]。但目前港口集疏运系统中存在瓶颈,许多港区分散且直接进出的铁路不便,主要依靠公路运输将集装箱从港口输送到内陆集货中心或铁路货运站[2-3]。这不仅增加了运输环节,也使得运输效率较低,甚至公路运输还易受道路条件、交通状况等外界因素影响。因此,开发新型的集装箱转运方式以实现快速有效的港区物流运输,是当前的重要研究课题。
地下物流系统作为一种新兴的城市货运方式,自20世纪90年代在欧美等国家兴起[4]。该系统充分利用地下空间资源,采用自动导向车,以集装箱为基本运输单元,在地下建设轨道和运输网络,可实现高密度和全天候不间断运作的运输服务[5]。国内外学者也开始尝试将该技术应用于港区间的集装箱快速运输。王坚[6]结合上海洋山深水港区东西港区集装箱转运方式分析,提出了地下集装箱输送系统的应用案例。孙飞飞等[7]针对上海外高桥至嘉定线的地下物流系统布局方案,建立综合运输网络优化模型,分析了在集装箱港区实行地下物流系统的合理性。何凌晖等[8]根据上海外高桥港疏港通道的现状交通特征和未来交通量,分析了建设地下物流系统对疏港通道的经济、社会效益。 Wiegmans等[9]探讨了连接荷兰斯希波尔航空港区与花卉拍卖市场间的地下物流系统项目。然而,现有研究更多还停留在地下物流系统的整体规划和经济效益分析阶段,较少系统考虑将该技术应用于解决集装箱在港区的多式联运问题,特别是缺少针对地下高效集装箱运输技术本身的研究。
因此,本研究提出一种基于地下物流的集装箱转运技术方案。该方案利用地下通道和自动导向车实现港区和货运站之间的高效运输,并在车体设计、定位组件、控制系统等方面进行设计创新。研究目的在于探讨该技术方案能否提高现有多式联运的运输效率,为我国港口集疏运提供一种新的物流解决方案。
1 总体设计方案
基于地下物流的集装箱转运系统的总体设计目标,是实现港区与内陆货运站之间的高效运输。为达到此目标,需解决车辆连接、精确定位和运输安全等方面的技术问题。经分析,该系统可采用如下技术方案。
1.1 系统布局
系统在港区内设置地下站点,以及连接至货运站的地下主运输隧道。港口吊机将集装箱下放至地下站内的运输车上,车辆沿导向轨道通过主隧道运送至目的地——自动导向车停靠点进行卸载。
1.2 车辆设计
采用电力驱动、无人驾驶的自动导向运输车作为运输工具。车体两端设有精密配合的连接结构,实现多节车厢连接以运送不同规格长度的集装箱。车体底部装有轮轴及刹车装置,可沿地下物流平稳移动。车顶设有高精度的无线定位系统,实现与地面定位系统精确对位,从而引导吊机准确装卸。车体内部设置锁止、限位组件,实现对集装箱的稳定固定。
1.3 运输控制
在地下站点及主隧道内设置精准的无线定位系统,实现对车辆运动状态的实时监控。运输过程通过地面控制中心的无人驾驶系统进行控制,可实现车队组织调度、速度控制等功能。同时设置传感器监测车内集装箱状态,如发生异常及时制动防止损坏。
1.4 装卸系统
地面站点设置基于多点红外的精密定位系统。吊机吊具装有配套的定位装置,实现与地下车辆高精度对位,进行快速装卸。设置缓冲减震装置,保证装卸过程的稳定性及安全性。
1.5 运输效率
相比公路运输,地下运输不受地面交通影响,全天候运转,运输速度更快。有效载荷率高,单车可承载1~2个TEU,且多车可编组运行。无人驾驶可实现车队高密度运输,可在不增加车辆的前提下大幅提高系统运输频次及效率。
该总体设计方案可实现自动化、精确化的高效集装箱地下快速转运。车辆连接解决了运输不同规格长度集装箱的技术问题;精密定位系统及控制方案保证了装卸和运输过程的安全性及效率。该设计可有效利用地下空间资源,大幅提升港区的集装箱快速流通能力。
2 关键模块功能设计
2.1 车体设计
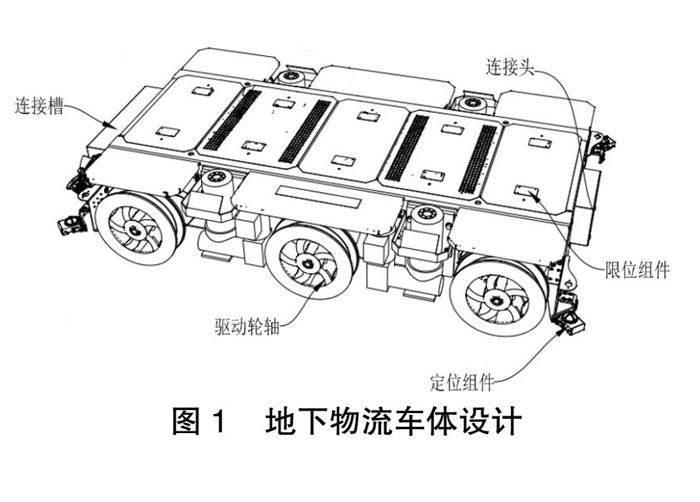
根据地下集装箱转运的工作环境和运输需求,本研究设计了一种新型连接自动导向运输车体。该车体长度可根据实际需要确定,一般可承载1~2个TEU。车体主要由车架、连接结构、驱动轮轴组成,并设置精密的无线定位系统、集装箱限位组件等,如图1所示。
2.1.1 车体材质选用
考虑隧道受力情况及运输安全需求,车体材质选用高强度钢材,表面进行防腐处理。底盘采用箱形焊接结构,确保承载力及刚性。车体颜色考虑周边环境设计,便于故障检测。
2.1.2 连接结构设计
车体前后两端对称设置连接结构,包括连接头和连接槽。连接头为钢制圆柱体。连接槽内设置电动伸缩锁止机构,实现对连接头的精确锁紧。通过连接结构可实现多节车厢连接,延长有效运输长度,用于长集装箱的输送。
2.1.3 驱动轮轴系统
车底部前后对称设置两个驱动轮轴,每个轮轴装有两侧独立驱动的橡胶驱动轮。轮轴通过悬挂系统连接车体,可根据地下轨道微地形进行自适应调节。轮轴两端设有电子反馈刹车装置,实现精准定位停靠。
2.1.4 无线定位系统
车顶均匀设置多个无线定位天线,实现与地面定位系统的高精度对位。精度可达毫米级,有效解决装卸时的精确定位问题。无线信号采用专用编码,避免干扰。
2.1.5 集装箱限位组件
在车内顶部设置多个气动或电磁锁止装置,实现对集装箱的自动锁紧。同时设置压力和位移传感器,监测集装箱在运输过程中的状态,如发生异常可立即制动防止二次损坏。
该车体设计实现了地下环境中集装箱的安全稳定运输。车体连接结构可根据集装箱长度实现灵活组合;精密定位系统和限位组件保证了运输过程的安全。
2.2 定位组件设计
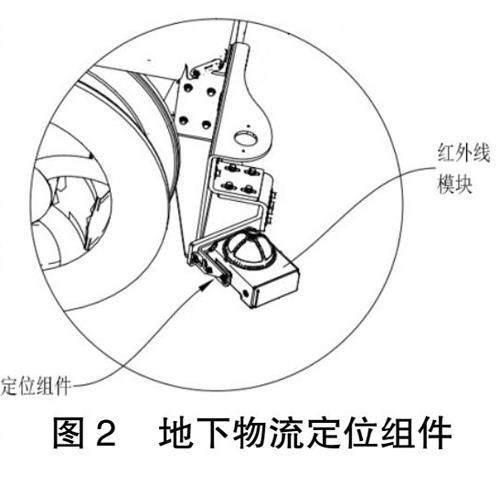
精确的定位系统是保证地下集装箱转运系统安全高效运作的关键。本研究设计了一个基于多点红外线高精度定位的装卸对位系统(如图2所示)。该系统确保了地面吊机与地下运输车辆的精确对位,其具体设计方案如下。
2.2.1 定位原理
利用红外线传感器的高方向性设计定位系统。在车顶四角设置四个红外线接收模块,对应地面吊机吊具设置四个红外线发送模块。当四点红外线对位时实现精确定位。
2.2.2 红外线接收模块
接收模块采用聚焦式设计,有效过滤环境光干扰。设置精密光电转换芯片,输出定位信号。加入温度补偿电路,提高工作稳定性。采用圆形阵列布置,优化信号捕获面。
2.2.3 红外线发送模块
发送模块采用高功率红外线发光二极管并加入聚光发射透镜,形成高方向性的红外线信号。设计紧凑型环形结构,确保多点发射信号精确正交。输出频率稳定,不受环境影响。
2.2.4 信号处理与控制
车载定位模块通过信号处理电路实时检测多点红外线接收情况,输出定位状态信号。地面吊机通过PID控制算法,根据定位信号进行三维精确控制,实现与车辆的对位。
2.2.5 系统精度
经仿真测试,该定位系统在正常工作环境下,动态定位精度可达±30mm,满足高精度自动装卸需求。系统反应时间<100ms,基本无延迟。
该红外线多点定位系统结构简单可靠,精度高、稳定性强,可适应地下环境运用。该系统的应用可有效解决集装箱地下快运过程中的对位问题,提高了转运系统的自动化水平及工作效率。
2.3 数据采集和控制系统
为实现对地下集装箱转运系统的监控和运输控制,本研究设计了一套基于智能化技术的数据采集和远程控制系统。该系统主要包括车载监控设备、站点监控设备、运输控制中心三部分。
2.3.1 车载监控设备
在每节车厢内设置工控机、传感器、摄像头等设备。工控机采集各项车载数据,通过4G网络实时传输至云服务器。传感器监测车厢环境及集装箱状态参数。摄像头实时传回车厢图像。
2.3.2 站点监控设备
在装卸站点及停靠点布置电子定位装置、站点摄像头等。定位系统向车载设备发送定位数据。摄像头实时监控站点作业情况。所有数据汇总上传至云服务器。
2.3.3 运输控制中心
建立包括云服务器、运维终端等控制中心,在地面指挥调度运输车队。云服务器接收各监控数据,进行存储处理。运维人员通过终端实时监测系统状态,并下达控制指令。
2.3.4 网络系统
利用4G网络与光纤网络,建立车载设备与控制中心之间的高速数据交换通道。数据传输加密,确保运输过程安全稳定。
2.3.5 控制方式
平时车辆按预设路线和时间自主运输;针对异常情况,人工远程控制车辆调度、速度控制等,实现快速响应。
该系统实现了对地下快运系统的全面监控管理,车载、站点及控制中心通过高速网络进行信息交互,为地下无人驾驶集装箱运输提供了重要技术保障。
3 性能分析评价
本研究对所提出的地下集装箱快速转运系统进行了多方面分析评价,主要从转运效率、运输安全两方面进行了讨论,评价了该方案的优势及效果。
3.1 转运效率分析
以上海东海大桥为例,其海上主桥段长度为25km。现行道路自动驾驶集卡车在该桥段行驶时速可达80km/h,但在恶劣天气情况下将被限制至30km/h。相比之下,本研究所提出的地下物流运输系统可设置车速同为80km/h,且不受外界气候影响,始终保持限速不变。因此,在正常气候下,两种运输方式车辆耗时相近,约为19min;但极端气候情况下,道路运输耗时增加至50min,增幅167%,而地下物流运输耗时保持稳定。可见,本方案可有效抵御恶劣天气对运输时间的负面影响,提高系统运转稳定性,这对于保障港口物流的持续高效运行具有重要意义。
3.2 运输安全性分析
地下环境无法目视装卸操作,完全依赖定位系统实现集装箱和运输车辆的高精度自动对位。若定位偏差过大,将直接导致集装箱装卸失败,影响运转效率。因此,定位系统精度需要控制在±30mm以内,满足集装箱自动对位的技术需求[10]。通过精准定位系统的有效设计和应用,可大幅提升地下快速转运的整体安全性和可靠性。这是保障地下无人自动集装箱运输顺利实施的重要技术基础。
4 结 语
本研究针对当前我国港口集疏运系统存在运输效率较低的问题,设计出了一整套系统化的基于地下物流的集装箱快速转运技术方案。该方案充分考虑了地下环境的特殊性,采用了多项创新技术手段,包括连接结构可变的自动导向运输车体设计、基于多点红外线的高精度装卸对位系统、车载监控及远程控制系统等。这些设计能够克服地下环境无法目视等困难,实现地面与地下的精确对接,保证地下集装箱的安全、高效运输。与传统公路运输相比,该方案可实现全天候不间断运转,大幅提升港口集疏运系统的运作效率和稳定性。本研究为我国港口的现代化、智能化建设提供了一种新的技术途径,未来将继续推动该设计方案的优化,并选择适宜的港区开展工程示范。
参考文献:
[1] 全年港口集装箱吞吐总量3.0亿TEU——我国规模以上港口运行月报(2022.12)[J].中国航务周刊,2023(6):44.
[2] 张雨琴.我国港口集疏运系统发展现状与优化分析[J].物流工程与管理,2011,33(6):9-10,19.
[3] 葛瑞,冯欲晓,郎茂祥.我国集装箱海铁联运存在的问题及对策研究[J].物流科技,2007(5):126-128.
[4] 俞明健.城市货运交通问题与城市地下物流[J].交通与运输,2017,33(3):1-3.
[5] 钱七虎.建设特大城市地下快速路和地下物流系统——解决中国特大城市交通问题的新思路[J].科技导报,2004(4):3-6.
[6] 王坚.基于地下集装箱运输系统的港口总体规划研究[J].水运工程,2010(1):38-42.
[7] 孙飞飞,梁承姬,胡筱渊.碳交易背景下集装箱港区地下物流系统运输网络分析[J].隧道建设(中英文),2020,40(1):58-65.
[8] 何凌晖,段征宇,陈川,等.基于疏港通道交通特征的地下物流效益分析[J].地下空间与工程学报,2019,15(5):1283-1289.
[9] WIEGMANS B,VISSER J,KONINGS R,et al.Review of underground logistic systems in the Netherlands:An ex-post evaluation of barriers,enablers and spin-offs[J].European Transport,2010,45(45):34-49.
[10] 自动化集装箱码头建设指南[S].北京:人民交通出版社,2021.
猜你喜欢
天津音乐学院学报(2022年2期)2022-07-28 02:32:12
商周刊(2018年15期)2018-07-27 01:41:18
商周刊(2018年15期)2018-07-27 01:41:18
商周刊(2018年15期)2018-07-27 01:41:18
商周刊(2017年9期)2017-08-22 02:58:04
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
印制电路信息(2015年6期)2015-12-30 12:57:52
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
当代音乐(下旬刊)(2015年5期)2015-05-30 05:21:05