
横向控制系统在商用车领域的应用
2024-06-08 10:44:39张国芳仲波刘枭倪一铭杨河清
汽车电器 2024年5期
张国芳 仲波 刘枭 倪一铭 杨河清


【摘 要】文章阐述横向控制系统的原理,对横向控制系统中的感知系统以及执行系统进行深度剖析,包括两者之间的交互关系和感知系统对执行系统的性能参数要求。通过标定测试开发出能够满足法规试验要求的商用车。
【关键词】感知系统;执行系统;电动转向;车道保持;二级阶跃控制系统
中图分类号:U463.6 文献标识码:A 文章编号:1003-8639( 2024 )05-0044-03
The Application of Lateral Control System in the Field of Commercial Vehicles
ZHANG Guofang,ZHONG Bo,LIU Xiao,NI Yiming,YANG Heqing
(Nanjing Iveco Automobile Co.,Ltd.,Nanjing 210000,China)
【Abstract】This article deeply analyzes the perception and execution systems in the lateral control system by understanding the principle of the lateral control system,as well as the interaction between the two,including the performance parameter requirements of the perception system for the execution system. Through calibration testing,commercial vehicles that can meet regulatory testing requirements are developed.
【Key words】perception system;execution system;electric steering;lane keeping;secondary step control system
随着汽车智能化的发展和车辆自动化程度的增加,软件汽车的概念也逐步被人们所认可。高级辅助智能驾驶系统ADAS是科技引领汽车未来的发展方向,摄像头、雷达等先进传感器相当于给汽车装上了眼睛、腿脚,甚至是大脑,为行车安全增加了一道保障。用软件控制代替驾驶员控制车辆,解放驾驶员双手及双脚的同时提高驾驶的舒适性和安全性,有效保障用户用车安全。高级辅助智能驾驶系统ADAS组成如图1所示。汽车智能驾驶感知系统是汽车的“眼睛”和“耳朵”,负责对汽车所处环境进行侦测,构成了汽车系统感知层,并为高级辅助驾驶系统的决策层提供准确、及时、充分的依据。根据决策的结果进行路径规划,并对执行系统进行控制请求,进而由执行系统对汽车安全行驶做出准确判断。软件对汽车的操控主要包括对汽车的横向和纵向控制,本文主要针对汽车的横向控制在商用车领域的应用展开论述。
1 商用车横向控制的ADAS感知系统
横向控制的原理是通过方向盘控制前轮转角,实现车辆航向角的改变,从而控制汽车的横向位移。由于车辆不能一直走直线,要适应路面的曲率,躲避坑洼、障碍物等,需要对车辆进行横向控制。按照采用传感器类型的不同,车辆的自动驾驶或者高级辅助驾驶中的横向运动控制策略主要有非预瞄式和预瞄式两种。非预瞄式横向运动控制策略主要靠道路上安装的车路协同设备,如通过磁引导式或线圈引导式实现自动驾驶。而预瞄式横向运动控制策略主要模仿人类驾驶车辆的行为特性,以目标路径上车辆行驶方向前方的某一点作为跟踪目标,完成对规划路径的跟踪行驶。
预瞄式控制策略适用于以视觉感知系统获取路径信息的车辆,该种策略符合人类的驾驶习惯,且能在高速行驶工况下取得较好的控制精度,因而在自动驾驶技术领域有着广泛的应用。目前能实现如上功能的横向控制只有在L4级别的乘用车上开发此功能,而商用车ADAS系统主要还是在L3及以下的控制,包括LDW(车道偏离预警)和LKA(车道保持辅助)横向控制。
LDW主要功能是在车辆偏离车道时,通过声音、灯光、振动等方式发出报警信号,提醒驾驶员注意车辆的偏离情况,从而有效地降低交通事故发生,感知系统只要安装摄像头即可实现LDW功能。
LKA感知系统一般通过摄像头和雷达2个传感器来感知道路信息,融合规划出行驶路径,执行机构采用电动转向EPS,ADAS系统通过CAN总线接收车辆当前车速、横摆角率、方向盘扭矩等车辆信息,发送相应的横向控制请求信号给EPS执行相应的转向控制。横向控制请求方式包括扭矩控制与转角控制两种类型。EPS接收ADAS系统发送的转向扭矩或转角,同时接收整车的车身信息来计算执行电机电流大小,最后实现向左转向或向右转向。商用车横向控制系统LKA目前主要有车辆居中系统和车道偏离系统两种控制形式,控制策略也大相徑庭,车道居中的EPS时刻都需要响应ADAS系统的横向控制,而车道偏离纠偏只有在车辆无意识偏离接近到车道线时ADAS系统才会进行介入,给EPS发出请求角度或者扭矩的控制。两者功能不同,对执行器的参数标定也截然不同,两者具体区别见表1。
2 横向控制的EPS电动转向执行系统
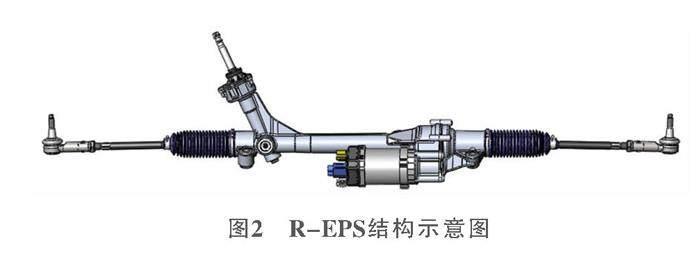
商用车由于车身长、质量重、质心高、方向盘转向间隙大和需要的转向力大,目前无法使用乘用车上的管柱C-EPS(管柱式电动助力转向)。商用车的执行系统采用EHPS(电控液压助力转向)、R-EPS(齿条式助力转向)较多,EHPS(电控液压助力转向)是由液压管路和电动泵组合,对电控单元的兼容性极差。目前车辆都需要配置ADAS高级辅助驾驶功能,无法实现对EHPS进行转向控制,故R-EPS应用较为广泛。R-EPS采用滚珠丝杠传动循环球助力,传动精度高,传动效率高,并且可承受的横向载荷大,其结构示意图如图2所示,图中电机直接驱动齿条运动。R-EPS电动转向主要功能包括基础助力、保护功能以及高级功能,其中基础助力包含了随车速助力、阻尼补偿以及回正功能,保护功能包括止点保护、齿条末端保护以及温度保护功能,高级功能配合ADAS系统实现LKA车道保持以及APA自动泊车等功能。
EPS逻辑控制原理如图3所示,其中基础助力EPS控制器接收车速信号和方向盘扭矩信号,计算输出扭矩指令控制电机,提供助力。基于不同车速进行手感标定,低速时提供较大助力,高速时提供较小助力。止点保护作用是防止方向盘在转向憋死的情况下,电机电流过大对电机造成损害,当电流过大并持续一段时间时,降低助力输出。EPS在高级功能中作为执行机构,根据上层控制器给的目标力矩或者转向角度指令或者转角指令对电机进行力矩控制,通过将目标力矩和助力力矩合成叠加力矩,计算目标输出电流,作为最终的电机电流。
3 感知系统和执行系统之间的交互
商用车上感知系统和执行系统之间的交互都是通过CAN总线上的信号进行握手交互,即感知系统会采集执行系统的状态信号,如果执行系统已经满足条件会发送等待请求信号给感知系统,感知系统根据道路信息、车辆信息满足了横向控制的触发条件,即对执行系统进行角度或者扭矩的控制请求,执行系统执行过程中实时反馈执行后的角度和扭矩大小,此閉环控制即成功完成一次握手。具体感知系统和执行系统的信号流如图4和图5所示。
商用车上层ADAS控制与EPS之间的交互握手包括LDW和LKA两种方式,其中LDW指在车道偏离时LDW对EPS进行振动的请求,主要包括振动幅度和频率的请求。EPS应将LDW振动幅度的最大值限制在标定值之内,默认值为3N·m。如果EPS接收到时长为100ms无效的振动幅度请求,即请求的振动幅度大于阈值,EPS应发送信号提示系统无法响应,临时故障。EPS应将LDW振动频率的最大值限制在标定值之内,默认值为25Hz。如果EPS接收到100ms无效的振动频率请求,即请求的振动频率大于阈值,EPS应发送信号提示系统无法响应,临时故障。另外一种交互握手LKA,即满足条件驾驶员未打转向灯车辆偏离时,LKA对EPS进行扭矩或者角度的横向控制,其中扭力杆扭矩正负值方向应当满足ISO 8855的规定,正值方向应当向左,负值方向应当向右。另外当驾驶员手脱离方向盘静止或行驶时,考虑到磁场影响,车辆的转向系统各个朝向下扭力杆扭矩数值应不大于0.2N·m。由于ADAS激活时,对转向系统的响应特性和驾驶员控制时有不同要求,故转向系统应能在ADAS激活过程中提供单独的助力曲线以同驾驶员控制时的助力曲线区分开来。
4 评价横向控制的二级阶跃控制系统时域分析法
评价车辆横向控制的好坏是由二级阶跃控制系统的相关指标来确定,横向自动控制系统输入信号是典型的阶跃信号,此系统的时间响应由动态过程和稳态过程两部分组成。动态过程是在LKA系统请求角度信号时,EPS输出量从初始状态到最终状态的响应过程;稳态过程是EPS输出量随着时间t趋于无穷时,系统输出量角度误差已经控制在稳态误差范围内,故时域中评价系统的动态性能,通常以系统对单位阶跃输入信号的动态响应为依据,即评价系统的动态性能,规定了相关的评价指标。图6给出了横向控制二级阶跃系统一次控制全过程,ADAS系统LKA功能对EPS请求转向角度的单位阶跃响应,EPS对角度信号的动态响应曲线,即单位阶跃响应曲线。
LKA系统根据车辆信息发出目标角度请求,即通过CAN总线发送的转角指令,以正负号区分左转还是右转,EPS实际反馈角度即方向盘(转向传动装置上)安装的转角传感器测量并通过CAN总线反馈的方向盘转动角度,目标角度和实际反馈角度之间在时域中存在的差异即评价系统的动态性能。评价系统的动态性能需要考虑以下几个指标。
1)静默时间Td。又可以理解为延迟时间,指CAN总线上开始发出目标角度指令的时刻到接收实际反馈角度开始产生变化的时刻之间的时间差,静默时间与报文周期有关,为保证整个系统的响应时间,SAS角度传感器的报文周期正常为20ms,静默时间需要额外再加上报文周期。静默时间表征系统初始阶段的快慢。
2)上升时间Tr。又叫执行时间,指实际反馈角度开始产生变化的时刻与反馈角度第1次达到90%目标值的时间差。上升时间是系统响应速度的一种度量,上升时间越短,说明系统的响应速度越快,提高响应速率即角速率越大,上升时间越短,但是会影响系统的稳态时间和超调量,这时需要将EPS控制器调整到最佳的阻尼比状态(最佳阻尼比0.707),既可以保证响应速度,也可以保证超调量。如果系统的静摩擦越大,启动力矩要求也越大,反应的时间慢,也可以通过前馈来补偿这种静摩擦。上升时间表征系统初始阶段的快慢。
3)峰值时间Tp。响应的角度超过了稳态值而达到第1个峰值所需要的时间。响应过程中,实际反馈角度超过目标角度的最大角度值就是峰值。峰值时间表征系统初始阶段的快慢。
4)稳态调节时间Ts。与开始变化时刻之间的时间差,稳态时刻是EPS相应的角度与请求值之间的偏差达到允许范围的稳态误差,以后并一直保持在稳态误差范围内。稳态误差与响应的方向盘转角角度有关,请求的转向角度越大,稳态误差值越大。例如请求方向盘转角50°,稳态误差要求小于1°。调节时间表征EPS系统动态过程的持续时间,从总体上反映了系统的快速性。
5)超调量Mp。EPS系统稳态反馈角度与目标角度存在的误差,超调量表征EPS系统动态过程的稳定性。
根据以上性能参数,表2列举了商用车LKA系统对EPS系统角度控制时的性能指标,也决定了最终车辆是否能够满足GB/T 41796—2022商用车辆车道保持辅助系统性能要求及试验方法。EPS在标定的过程中满足了相关性能指标,然后结合LKA的标定进行联调,最终能满足法规和功能要求。
5 结束语
本文基于对商用车的横向控制系统进行分析,剖析了感知系统和执行系统以及相互关系,明确性能指标的要求对整个系统的影响。通过标定测试,完成了车辆整个横向系统的开发验证,最终满足车辆的功能要求。
参考文献:
[1] 高琳琳,戎辉,唐风敏,等. 自动驾驶汽车横向运动控制方法综述[J]. 汽车电器,2019(9):1-4.
[2] 丁冬萍. 基于双目视觉的车道保持系统的研究[D]. 重庆:重庆交通大学,2019.
[3] 化雅静. 智能车辆辅助驾驶系统中车道偏离预警算法的研究[D]. 长沙:湖南大学,2015.
(编辑 杨凯麟)
收稿日期:2023-12-01
