
近景摄影测量在协作机械臂末端重复定位精度中的应用
2024-06-04 08:19:48张启照
四川建筑 2024年2期


摘要:针对协作机械臂末端重复性定位研究,从近景摄影测量的角度出发,使用基于角锥体原理的空间定位算法,完成了数据采集与算法验证工作。该方法具有设备组成简单、操作简单、使用效率高的特点,在具体的机械臂末端重复定位精度测试中具有一定的使用价值。
关键词:近景摄影测量; 角锥体; 重复定位精度
中图分类号:P204文献标志码:A
0引言
协作机械臂作为一种自动化的设备,广泛应用于机械制造,食品加工,智能制造、柔性装配等行业[1]。由于加工误差和金属热胀冷缩等原因产生的误差,会影响其末端重复定位精度,而机械臂末端的重复定位精度对仪器设备的高精度安装起关键性的作用,机械臂出厂之前需要进行严格的末端重复定位精度测试。目前最常用的测试方法有千分表法,全站仪法,激光跟踪仪法[2]。千分表法依赖于人工读数,通过读入每次机械臂末端的碰撞数据并做记录,比较两次的数据差值进行重复性研究,这种方法严重依赖人工作业,同时由于这种方法需要碰撞试验,不可避免的会存在碰撞间隙,加大测量误差[3]。全站仪法是使用高精度测量全站
仪获取机械臂末端的位置坐标信息,通过距离计算公式获取机械臂的移动距离以及重复定位指标,这种方法对于现场测试人员技术要求较高,场地需要平坦稳定无遮挡。激光跟踪仪法是将测量靶球固定于机械臂末端,使用激光跟踪仪获取机械臂跟踪靶球获取机械臂的位置信息,这种方法精度较高,但是仪器价格昂贵,而且对场地要求严格[4]。基于以上分析,本文提出了一种新的机械臂末端重复性定位精度研究新方法,该方法采用近景摄影测量技术,依赖数字图像处理技术自动化完成机械臂末端重复定位精度研究,并通过实验分析,验证了该方法可行性,具备一定的应用价值。
1机械臂末端定位介绍
近景摄影测量技术是指采用数码相机近距离(一般指100 m以内)拍摄布设合作标志的目标图像,通过图像处理技术确定待测物的大小、形状和几何位置的技术,目前最常用的合作标志是回光反射标志[5]。
近景摄影测量空间定位是指根据影像计算拍照瞬间相机在世界坐标系的位姿信息(Xs,Ys,Zs,Rx,Ry,Rz)信息,相机坐标系与世界坐标系转换关系如图1所示。
目前采用较多的是基于角锥体法的空间后方交会算法,该算法首先使用角锥体原理获取相机位姿初值,之后将共线条件方程基于欧拉角展开,使用最小二乘迭代计算获取相机位姿的精确值,完成相机的定位工作。
针对协作机械臂末端重复性定位,本研究将相机固定于机械臂末端,操作机械臂运行至提前设计的空间位置,计算相机在世界坐标系中的位置,使用相机位姿信息表达机械臂末端的重复性。
2空间定位技术
2.1相机检校
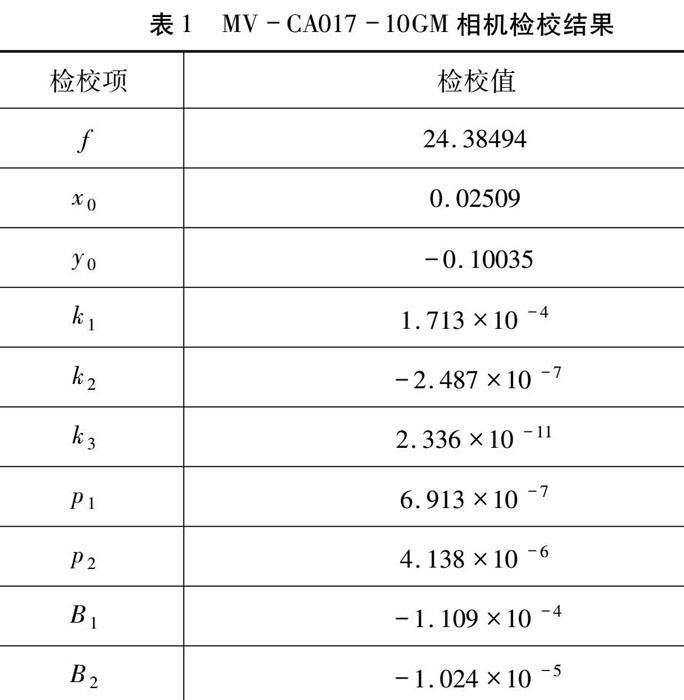
理想的相机成像是物点、摄影中心、像点位于一条直线上。但是由于镜头加工工艺、相机内部机械结构不稳定等因素的影响,导致成像的像点总会存在误差,十参数模型是目前最常采用的削弱误差的模型,该模型将像主点偏移量(x0,y0)、焦距(f)、镜像畸变(k1,k2,k3)、切向畸变(P1,P2)、像平面不平行畸变(B1,B2)一共是个参数测量系统的补偿参数[6]。相机检校的目的就是解算出10参数,用于后续的精确测量与计算。针对本实验使用的海康威视MV-CA017-10GM相机与24 mm镜头检校参数如下:
2.2基于角锥体法计算相机位姿
如图2所示,A(X1,Y1,Z1)、B(X2,Y2,Z2)、C(X3,Y3,Z3)为3个控制点,其相应像点为A′(x1,y1)、B′(x2,y2)、C′(x3,y3),到摄站S的距离分别为dAS、dBS、dCS;ΔABC边长B2-1.024×10-5分别为dAB、dBC、dAC; ∠ASB、∠BSC、∠ASC分别为α、β、γ。
在ΔASB、ΔBSC、ΔASC中,由余弦定理可得:
d2AB=d2AS+d2BS-2dASdBScosα
d2BC=d2BS+d2CS-2dBSdCScosβ
d2AC=d2AS+d2CS-2dASdCScosγ(1)
式中:α、β、γ可在ΔA′SB′、ΔB′SC′、ΔA′SC′中由余弦定理獲得。
设距离dAS、dBS、dCS比值为1∶n∶m,即式(2)。
dBS=n·dAS
dCS=m·dAS(2)
将式(2)代入式(1),可得式(3)。
d2AB=d2AS+(dAS·n)2-2d2ASncosα
d2BC=(dAS·n)2+(dAS·m)2-2d2ASnmcosβ
d2AC=d2AS+(dAS·m)2-2d2ASmcosγ(3)
消去dAS、m可得式(4)。
w1n4+w2n3+w3n2+w4n+w5=0(4)
答解式(4)可得n值,由于该式为一元四次方程,共有4个根。此时,可再加入一个控制点D,利用A、B、D三点求得另一组n值,选取两组中相同的一个即为实际距离比值。将其代入式(4)可得距离dAS、dBS、dCS即式(5)。
dAS=dAB21+n2-2ncosα
dBS=dAS·n
dCS=dAS·m=d2BC-d2AC+d2AS-d2BS2(dAScosγ-dBScosβ)(5)
在像空间坐标系S-xyz中,像点A′、B′、C′坐标分别为:A′(x1,y1,-f)、B′(x2,y2,-f)、C′(x3,y3,-f)。由比值dSA′/dSA、dSB′/dSB、dSC′/dSC可得A、B、C在像空间坐标系中坐标(Xis,Yis,Zis)(i=1,2,3)见式(6)。
建筑设备与建筑材料张启照: 近景摄影测量在协作机械臂末端重复定位精度中的应用
X1s=dAS·x1x21+y21+f2
Y1s=dAS·y1x21+y21+f2
Z1s=-dAS·fx21+y21+f2
X2s=dBS·x2x22+y22+f2
Y2s=dBS·y2x22+y22+f2
Z2s=-dBS·fx22+y22+f2(6)
X3s=dCS·x3x23+y23+f2
Y3s=dCS·y3x23+y23+f2
Z3s=-dCS·fx23+y23+f2
已知3个控制点A、B、C在像空间坐标系和物方空间坐标系中坐标(Xis,Yis,Zis);(i=1,2,3)、(Xi,Yi,Zi),便可通过公共点转换答解像空间坐标系与物方空间坐标之间的转换参数,由此,便可求得摄站参数值(Xs,Ys,Zs,Rx,Ry,Rz)[7],将计算的位姿使用最小二乘迭代计算,即可获取精确解。
3试验结果及分析
3.1建立世界坐标系
建立世界坐标系的目的是将后期所有的数据准均以此为基准进行对比分析。将回光反射编码点与单点布设于2 000 mm×2 000 mm区域的墙壁,布设完毕之后在控制网前方采用交向摄影的方式采集50张影像,使用近景摄影测量V-STARS系统进行处理获取每一个编码点的物方坐标,如表2所示,布设的控制场点位如图3所示。
3.2数据获取及结果分析
调整相机视场,以能满幅采集到整个控制场为准。使用机械臂的拖动示教功能,拖动机械臂并记录位置轨迹数据,保存成唯一的控制文件,之后调整机械臂按照规划好的路径进行移动,并在指定的停留位置触发传感器采集图像,通过机械臂示教器记录下每个停留位置的坐标值(X,Y,Z),如表3所示,传感器采集图像位置如图4所示,协作机械臂如图5所示。
本次实验设计16个机械臂的移动位置,进行3次重复性实验,通过示教器获取机械臂给出的实时位置信息,并采集每个位置的图像,根据基于角锥体法计算相机位姿算法,解算获取机械臂每处位置的位姿数据。并通过三维坐标按照机械臂运动顺序计算两个点位之间的距离值,与示教器上距离值进行对比分析,分析数据如表4所示,其中Rms值为:0.289 mm;根据测量数据分析,使用近景摄影测量的方法能够满足机械臂末端重复性定位的研究工作。
4结论
论述了使用近景摄影测量方法进行机械臂末端重复性定位研究的工作具体步骤,推导了基于角锥体原理空间定位的算法步骤,最后通过实验进行数据的采集与分析。验证了使用该方法进行协作机械臂末端定位的可行性,具备一定的使用价值,该方法具有优点:
(1)设备组成简单。仅使用一台普通数码相机与配合的标志点即可完成数据的采集工作。
(2)运行效率高。机械臂运动过程中即可完成数据的采集,与机械臂其余测试工作可以并行。
(3)算法精度高,使用基于角锥体原理的空间定位算法,经过多次迭代获取数值的精确解。
实验中没有考虑针对不同温度与湿度影响下的该方法的机械臂重复定位精度,这是下一步需要研究的重点。
参考文献
[1]董陽. 面向机械臂抓取应用的视觉识别与定位技术研究[D].沈阳:沈阳工业大学,2022.
[2]鲍丹,侯保林. 基于深度学习的单自由度机械臂定位可靠性估计[J]. 振动与冲击,2021,40(15):246-252+283.
[3]刘继宗. 基于视觉引导的机械臂定位抓取研究与实现[D].重庆:重庆邮电大学,2021.
[4]韩硕. 基于机器视觉定位的机械臂运动学分析与研究[D].北京:北京交通大学,2021.
[5]李江涛,潘春强,刘伟,等. 关于数字近景工业摄影测量的关键技术及其应用[J]. 电子元器件与信息技术,2021,5(9):164-165.
[6]黄桂平. 数字近景工业摄影测量关键技术研究与应用[D].天津:天津大学,2005.
[7]官云兰,周世健,周铭,等. 基于角锥体原理的空间后方交会改进算法[J]. 测绘科学,2006,(2):27-28+3.
[基金项目]郑州财经学院第二批“提质工程”建设项目(项目编号:TZGC-JGXM-2022-28)
[作者简介]张启照 (1981—),女,本科,副教授,主要从事土木工程教学与研究工作。
