国外空中加油受油机操纵品质试飞技术综述
2024-05-30 10:35:02李雅静
科技创新与应用 2024年15期

作者简介:李雅静(1985-),女,硕士,高级工程师。研究方向为飞行品质试飞。
DOI:10.19981/j.CN23-1581/G3.2024.15.007
摘 要:针对飞机执行软式空中加油任务时飞行品质试飞及评价方法缺失的问题,搜集国外文献,结合实际空中加油试飞,分解空中加油任务得到加油不同阶段飞行品质关注重点。针对性提出加油任务相关的操纵品质试飞及评价方法,改进加油模态飞行控制律,改善飞行品质、尾流场操纵品质检查、空中加油任务闭环操纵品质评价等,对我国空中加油飞行品质试飞及评价具有较大参考价值。
关键词:软式空中加油;操纵品质;尾流场试验;闭环任务品质评价;受油机
中图分类号:V212.1 文献标志码:A 文章编号:2095-2945(2024)15-0029-05
Abstract: In response to the issue of the lack of flight quality test and evaluation methods for aircraft performing soft aerial refueling missions, it is necessary to collect foreign literature and combine it with actual aerial refueling test flights. By breaking down the aerial refueling mission, the focus points for flight quality during different refueling stages can be identified. Specific methods for handling quality test and evaluation related to the refueling mission can be proposed, such as improving the flight control laws for the refueling mode to enhance flight quality, conducting wake field handling quality checks, and developing a closed-loop handling quality evaluation for the aerial refueling mission. These measures are of significant reference value for the test and evaluation of flight quality in aerial refueling in China.
Keywords: soft aerial refueling; handling qualities; wake field experiment; closed-loop mission quality evaluation; receiver aircraft
空中加油受油机飞行品质是决定加油任务能否顺利完成的关键因素。战斗类飞机作为受油机,由于飛机本身机动特性较强,完成受油任务相对容易。而对于大型受油机,如运输类飞机,机动能力差是完成空中受油任务的最大障碍,要设计出具有怎样的机动能力的飞机才能够满足空中受油任务是大型飞机设计试验中面临的难题[1]。目前中华人民共和国国家军用标准(简称“国军标”)缺乏对空中受油飞行品质的分析手段和经验,美军标的MIL-STD-1797A中只有少量的加油对接任务[2],我国国军标GJB 185—86《有人驾驶飞机(固定翼)飞行品质》中对于加油任务只定义了A种飞行阶段中部分开环指标[3],难以对现有飞机受油飞行品质进行准确分析,不能很好地指导飞行品质设计及面向加油任务的飞行试验设计。
飞机在加油过程中的操纵性、稳定性评价十分重要,是关乎加油成败的最关键因素,亟待研究。本文通过研究国外相关试飞及评价技术,总结得到能指导后续空中加油任务的飞行品质试飞方法和评价方法。
空中加油时受油机需要进行的飞行品质试飞内容主要包括3个方面:一是受油包线确定及操纵特点检查;二是尾流场影响检查;三是对接及保持时闭环飞行品质评定。本文将从这3个方面开展受油机执行加油任务飞行品质研究。
1 大型受油机加油飞行控制系统改进
为了提升飞机作为受油机执行受油任务的飞行品质,多数带控制增稳系统的飞机或是电传飞机会适应性更改控制律。受油机进行受油一般有如下控制要求[4-5]。
一是单独的加油状态开关;
二是增加稳定性,克服加油机气流干扰;
三是在一定范围和时间内,能够保持稳定的姿态角;
四是加油过程中,受油机一旦遭遇敌情或险情,来不及断开加油状态开关时,可通过增大驾驶杆的操作量恢复对飞机的正常操纵。
参考文献[6]介绍了C-17A运输机作为受油机的飞行控制系统的最新更新。飞行控制升级是针对过去飞行员在完成空中加油任务方面存在一些困难而进行的,旨在通过改善飞机响应特性和可预测性来提高任务期间的飞机操纵品质,同时尽量减少飞行员诱发振荡。
1.1 三轴操纵改进
为改善C-17A在空中加油过程中的操纵品质和反应特性,对空中加油模式的传统控制律进行了修改,以减少俯仰、滚转、推力轴的关键飞行员飞行频率的动态时延。3个轴都采用了复杂、独特的非线性控制律。空中加油模式控制律设计修改的目标包括提高操纵品质、降低飞行员诱发振荡(PIO)敏感性、减少对接断开次数、更容易接近与对接、降低受油机与加油机机组人员的工作负荷水平和降低飞行事故的可能性,并缩短了训练时间和飞行小时,用于精确操纵、空中加油跟踪任务。俯仰轴通过升降舵控制执行精确的俯仰角跟踪。横向利用差动副翼精确跟踪滚转角和航向变化。这有助于飞行员更容易、更精确地控制方位角的微小变化。对偏航轴空中加油模式控制律进行了优化,以最小化转弯时的侧滑量。
1.2 推力轴改进
传统的C-17A空中加油模式没有控制律来帮助飞行员控制相对于加油机的前/后位置。飞行员通过调节发动机电子计算机使用的节流阀改变发动压力比(EPR),从而改变推力。发动机响应中存在大量的时间延迟,这导致飞机向前向后移动的操纵品质差,如飞行员给出 3级品质和严重的PIO趋势评价。飞机推力响应延迟大,需要进行更改,使用小幅襟翼、扰流板实现快速减速,利用小幅度的气动增阻,实现对飞机前后移动的精确跟踪,新的推力轴(前/后平移运动)控制律的主要特点是为了改善传统飞机的操纵品质。
1.3 改进结果
飞行试验过程中,飞行品质及PIO评价使用的是库伯哈珀评分和PIOR评分准则,飞行试验结果是总体为1级良好的操纵品质,飞行员没有进一步改进的要求。由于对俯仰、滚转、推力轴进行了广泛、复杂、创新的控制律更改,所有设计目标都得到了满足。飞行员感觉到几乎没有延迟,这使得响应特性在所有3个轴上都比传统的更可预测和可控,且没有PIO趋势。
2 国外软式加油操纵品质试飞技术
2.1 加油包线确定
加油机的加油包线和受油机加油包线重叠的部分,即为两型飞机加油包线,主要是高度速度包线,一般情况下,速度越大,锥套越稳定,需要关注受油机在加油机尾流中的加速能力,即发动机推力是否足够;速度越小,锥套稳定性越差,不利于加油对接,具体包括以下2点。
第一,确定完成空中加油的飞行高度和速度范围,应根据在加油开始和结束阶段加油机需用和可用推力的曲线与受油机类似曲线的综合分析来进行。利用剩余推力,2架飞机以初始的和接近最后的重量完成对接时能进行足够的机动飞行,并且在加油过程中万一出现脱开时也能进行机动飞行。
第二,选择能进行空中加油的高度、速度范围的第2个条件是“加油管-加油锥套”系统在气流中的稳定性。利用伴随飞机借助于摄影和观察加油管在气流中的动态的方法,评定出“加油管-加油锥套”系统的稳定性。这样的伴随飞机也可以是进行试验用的受油机。同时检查加油机自动驾驶仪调整的正确性。如果自动驾驶仪的纵向通道调整得不好,则会引起加油锥的上下摆动,因而很难或者甚至不可能在空中与其对接。
2.2 受油机受尾流场影响试飞方法
尾流测量飞行试验的目的是确定每个加油位置后面的安全加油区范围,评估加油机的流场及可能对安全或加油能力产生负面影响的任何相互作用。
尾流场探索顺序[7]适用于机翼吊舱和中心线加油平台。是在不同的纵向距离探索尾流场影响可接受的方框区域。其中探索程序确定初始位置,从初始位置向上、向左、向右区域开展尾流特性探索。如为确定加油机附近是否存在可接受的尾迹湍流区域,以便执行空中加油任务,评估了加油机对其后面位置的2架受油机的影响[7]。试验结果表明在测试的区域和条件下,加油机中心线和翼尖位置的尾流中存在一个受油机飞行品质可接受的区域,以便受油机执行空中加油任务,同时也给出了加油过程中尾流场检查飞行的试飞流程。
2.2.1 评估方法
会合后,受油机移动到右侧或左侧观察位置,该位置至少为一个加油机机翼長度,略低于加油翼尖。在加油机中心线的尾部和每个翼尖的加油吊舱位置进行试验。评估的位置包括预对接位置、输油区、非输油区。受油机在每个位置进行“方框评估”,如图1所示。飞行员通过操纵品质评级(HQR)评估了其在“方框”中的每个点保持±1.5 m(足够的)或±0.9 m(需要的)稳定飞机位置的能力,方框边界定义为当到达HQR 7或需要过大的横向或方向控制位移来保持位置或者飞机配平在任何轴上达到饱和。记录如下信息。
1)受油机和加油机的指示空速、高度、重量;
2)加油机机组人员,评估空气湍流;
3)受油机HQR和定性评论;
4)受油机飞机副翼、方向舵、俯仰配平(如适用)及控制输入的数值/方向和功率要求。
图1 机翼尾流场探索方框1
2.2.2 具体测试程序
选择不同高度、不同速度、不同加油机重量状态下,以左翼预对接位置为例,进行如下程序。
左侧机翼的预对接位置定义为加油机机翼后缘30.5 m后,与左侧吊舱加油管线一致,并有12.2 m的下降距离。一旦建立在预对接位置,受油机将按照如下所述执行方框评估。
1)爬升9.1 m(低于加油机机翼3.0 m),然后返回到预对接位置。
2)向左移动3.4 m(这使受油机与左翼尖对齐),然后返回到预对接位置。
3)向预对接位置右侧移动3.4 m,并返回到预对接位置。
4)向预对接位置左侧移动3.4 m,爬升9.1 m,稳定,下降9.1 m,然后返回预对接位置。
5)向预对接位置右侧移动3.4 m,爬升9.1 m,稳定,下降9.1 m,返回预对接位置。
6)通过向左移动3.4 m,爬升9.1 m,稳定,向右移动3.4 m,稳定,向右移动额外3.4 m,稳定,下降9.1 m,通过向左移动3.4 m回到预对接位置,形成一个矩形方框。
2.2.3 评价方法及试验中止标准
1)操纵品质评级(HQR)用于评估与定位和保持受油机在加油机后方稳定位置相关的性能和工作量。飞行员HQR与飞行员自身的可接受性评估有关。如果遇到飞行员诱发振荡(PIO),则使用PIO评级量表。飞行员的任务是在加油机后面的不同位置保持±1.5 m(期望的)或±0.9 m(足够的)的稳定飞机位置。
2)在加油机尾流内或附近的所有机动过程中,受油机的飞行员注意到是否存在操纵品质异常。测试点中止标准为HQR评分7,或者当需要过大的横向或方向控制位移来保持位置,或者当飞机配平在任何轴上饱和。
3)从加油机对称面到翼尖的水平截面范围,检查受油机相对于加油机的允许机动空域。在确定水平截面空域的过程中,由于加油机尾流对受油机机翼的影响,受油机会产生滚转,所以受油机的飞行员应确定克服此种滚转所需的操纵机构行程。
2.3 闭环任务飞行品质试飞及评价
为评估纵向闭环操纵品质、完善MIL-STD-1797A飞行品质标准,美国航空航天局计划对3个空中加油任务关联的动作进行分析研究[8],目的是确定评估飞机闭环空中加油任务操纵品质的最佳任务。
测试计划评估了3项候选任务:对接任务,锥套跟踪任务,锥套瞄准指向任务。测试中,对3项任务进行了评估比较,确定锥套跟踪任务被认为是评估闭环操纵品质的最佳方法。
具体任务描述如下。
2.3.1 对接任务
1)任务描述:①从预对接位置(在锥套后面3.0~4.6 m处,加油探头垂直和水平对齐)确定3~5节的接近率,并尝试对接。如果连接成功,稳定约30 s,然后建立3~5节的分离率,脱离并返回预对接位置。重复该任务至少6次,然后给出Cooper-Harper(CH)评分和飞行员诱发振荡(PIO)等级。②从4.6 m处接近,尝试对接。如果接近率超过5节,则中止尝试。如果探管尖端通过锥套的外边缘或出现危险情况,则中止对接尝试并返回预对接位置。由于湍流引起的瞬时锥套偏移导致的中止尝试将不占试验次数。
2)性能标准:①标准1期望的。在至少50%的尝试中,在不接触锥套边缘的情况下进行对接。没有PIO趋势。②标准2足够的。在至少50%的尝试中完成对接。
2.3.2 锥套跟踪任务
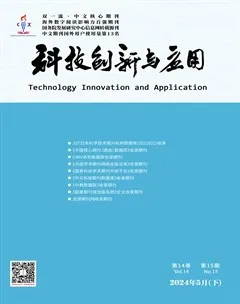
1)任务描述(图2):将探头稳定在锥套后1.8~3.0 m处。从这个位置开始,将探头保持在锥套边缘内至少20 s,使用锥套的中心作为瞄准点。重复这项任务至少3次。给出CH评分和PIO评级。
(b) 驾驶舱视角
图2 锥套跟踪任务示意图
2)性能标准:①标准1期望的。将探头保持在目标位置的±1/2个锥套半径范围内,包括垂直和横侧向。不得与锥套接触(除非锥套突然移动是由油轮或外部影响引起的),没有PIO趋势。②标准2足够的。将探头保持在目标位置的一个锥套半径内,垂直和横向。不得与锥套接触(除非锥套突然移动是由加油机或外部影响引起的)。
2.3.3 锥套瞄准任务
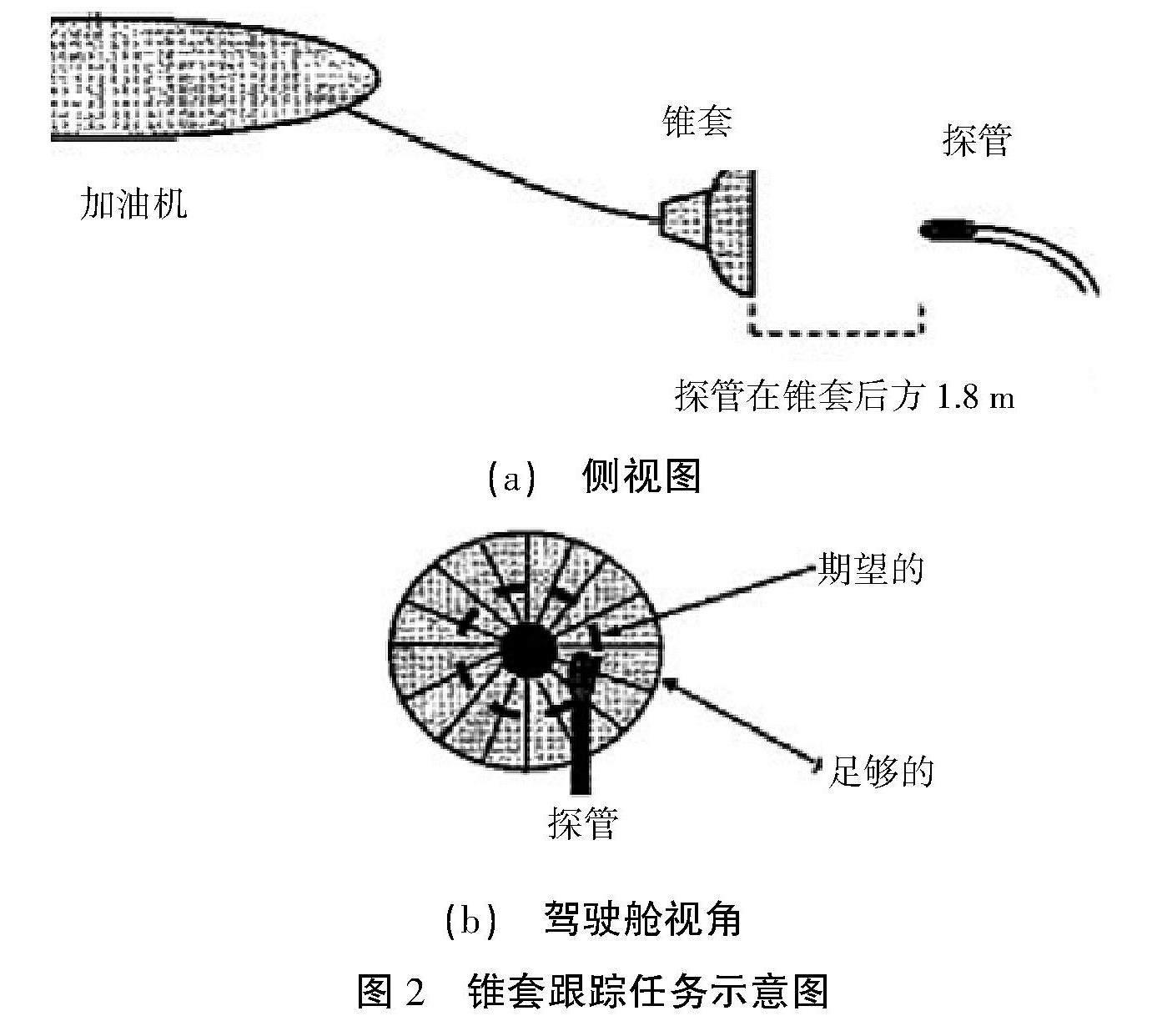
1)任务描述:在探头稳定在距离锥套1.8~3.0 m的位置后,快速(在1 s内)将锥套重新定位在锥套的顶部边缘,并稳定5 s。然后,快速(在2 s内)将探头重新定位在锥套底部边缘,并稳定5 s。最后,快速将探头重新定位到锥套中心(1 s内)。给出CH评分和PIO评级。
2)性能标准:①标准1期望的。将探头保持在所需位置的±1/2个锥套半径范围内,包括垂直和横侧方向。不得与锥套接触(除非锥套突然移动是由加油机或外部影响引起的)。没有PIO趋势。②标准2足够的。将探头保持在所需位置的±1个锥套半徑范围内,包括垂直和横侧方向。不得与锥套接触(除非锥套突然移动是由加油机或外部影响引起的)。
经过不同飞行员执行动作后进行打分和任务评述,锥套跟踪任务被认为是评估闭环操纵品质的最佳方法,但由于其无法给出距锥套1.5 m范围内可能遇到的头波效应的情况,因此,应结合锥套跟踪任务和加油对接任务,以全面评估空中加油任务中的闭环操纵品质。
(b) 驾驶舱视角
图3 锥套瞄准任务示意图
3 空中加油过程中的品质评价
空中加油过程飞行品质试飞要分阶段进行,具体包括如下4个过程。
3.1 远距到近距编队飞行时
飞行员要确定加油对接的机动过程中动力装置的工作状态和发动机所需的转速变化范围,飞行员从初始状态向加油锥套靠近,以便评定出加油锥套对受油机机身气流特性的影响,同时评定受油机机身前部对加油锥稳定性的影响。
远距到近距直到对接过程中检查受油机受尾流场影响。
3.2 在靠近加油锥套的密集编队过程中
评价操纵特性,例如对于有些大型飞机,利用小的往复操纵来操纵受油机,尤其是在俯仰系统,否则可能会引起受油机纵向摆。
当空中加油系统的飞行试验在双人驾驶的飞机上进行时,则应该明确飞行员之间的责任分工,并准备好必要的指令和报告,以便保证机组人员之间有最大程度上的相互理解和协同动作。
3.3 在预对接到对接过程中
受油机飞行员要评价对接过程中小幅操纵飞机时飞机的PIO特性,可以使用闭环任务飞行品质及评价方法。
关注油门操纵对飞机3轴的影响,因为不同类型的受油机在靠近加油锥的过程中会改变自身的纵向平衡,尤其是对于螺旋桨发动机的飞机。
3.4 在编队飞行进行空中加油时
应根据加油机的位置来保持受油机的位置。
在加油输油过程中,允许在一定的距离、高度上有限的机动。随着受油机飞行重量的增加,飞行员应增大动力装置的推力,评定使用油门杆操纵时所必需的工作转速和必需的推力变化。
4 结论
本文总结了国外固定翼飞机软式空中加油技术,包括大型受油机空中加油飞行控制系统改进、尾流场检查试飞方法、空中加油操纵品质试飞方法及评价技术,为我国固定翼飞机空中加油试飞及受油模态控制律设计提供了参考。
参考文献:
[1] ILOPUTAIFE O I, SVOBODA G J, BAILEY T M.Handling qualities design of the C-17A for receiverrefueling: AIAA-96-3746[S]. AIAA Guidance, Navigation and Control Conference, San Diego, California, 1996:29-31.
[2] Military Standard.Flying Qualities of Piloted Aircraft:MIL-STD-1797A[S]. 1990.
[3] 有人驾驶飞机(固定翼)飞行品质:GJB 185—86[S].国防科学技术工业委员会,1986.
[4] 李宁,李学仁.加装空中加油状态吓得受油机飞行控制律设计研究[J].电光与控制,2008,15(8):81-83.
[5] 隋成勇,由勇,杨勇田.新型歼击机空中加油飞行仿真建模研究[J].系统仿真学报,2005,17(6):1336-1338.
[6] GARY L W, MARIA G B, KAMAL M S. Improvements in aerial refueling flight control system for a large receiver aircraft[R].The boeing company, long beach, california, 2021: 19-21.
[7] GUIDRY M, WHITLEY S, MARKOWICH B. Boenig 767 proximity evaluation with F/A-18C and S-3B aircraft[R].美国政府科技报告,2001:1-74.
[8] KLYDE D H, MITCHELL D G.Handling qualities demonstration maneuvers for fixed-wing aircraft, volume ii: maneuver catalog[R].Flight Dynamics Directorate, Wright Lab., WL-TR-97-3100, Wright-Patterson AFB, OH, 1997.