公路施工安全预警系统设计
2024-05-29 03:42杨远洪贾晓坤
交通科技与管理 2024年9期
关键词:物联网
杨远洪 贾晓坤

收稿日期:2024-03-14
作者简介:杨远洪(1987—),男,本科,高级工程师,研究方向:公路工程附属设施施工及设计。
摘要 针对涉路施工中因来往车辆给施工人员造成的安全隐患,现有预警装置多以警示灯、警戒牌、警戒线等形式出现,这些设施仅对来往车辆起到警示作用,施工工人却无法即时感知。为此,文章提出了一种能使施工工人主动感知危险信号的预警系统。基于主动探测的设计原则,通过在施工道路养护区域前设置三级路障,并在路障上安装测速装置,利用ZigBee无线传输协议将速度信号传递给施工工人的马甲,马甲上的震动反馈模块会根据速度值的大小决定是否震动报警以提醒工人;进一步,震动模块采用PWM控制原理,会根据超速信号的大小调整震动强度。此外,文章结合实际情况中车辆刹车的状况,以及驾驶员的反应时间,通过计算得出各级路障之间设置的距离以及每一级路障设置的最小速度阈值,建立了主动预警系统模型。该模型对降低涉路预警领域的施工工人危险系数和完善该领域的预警方法具有重要意义。
关键词 涉路预警;主动探测;ZigBee;物联网
中图分类号 U231.3文献标识码 A文章编号 2096-8949(2024)09-0009-03
0 引言
随着我国的综合国力增强,各项基础工程建设逐渐纳入日程,交通工程施工建设是重要建设工程之一[1],而日常的养护和修补作业是其中的一大重要内容。涉路施工工程往往伴随着道路的半运行化,来往的车辆可能会给施工人员造成极大的安全隐患。因此,涉路建筑工地的安全管理非常重要,需要采取一系列的安全保护措施。目前,工地上大多采取一些传统的保护措施,比如施工工人戴安全帽,穿施工马甲,施工工地附近拉警戒线,立警示路障等,但是这些措施只能被动地保护工人安全,当险情真正来临时,对于正在进行施工养护作业的工人来说,其警示措施是很容易被忽视的。为了更好地保障工人安全,如何及时发现风险、预防风险是城市轨道交通项目施工安全风险管理研究的一个重要课题[2]。采用一种更加主动的预防措施,即基于施工工地主动预防的防护系统十分重要。该系统可以对来往车辆进行实时监测和预警,还可以将报警信号传达到施工工人,从而最大限度地提高施工工人的安全保障水平。
1 主动预防系统的方案设计
施工工地主动预防系统主要由三级智慧路障防护区、智慧马甲和无线传输系统组成。接近施工区域的汽车在抵达防护区时,智慧路障上的测速传感器会测量到车速,并将此数值与预先设置的最小速度阈值进行比较并判断,决定是否发出报警信号,以及是否将该信号通过无线传输系统传输给智慧马甲,由智慧马甲做出对应的响应,进而实现对施工工人做出警示,提高了施工工地的安全性。
1.1 智慧路障
智慧路障由测速传感器、无线信号发射器和上面的警报灯组成。智慧路障设计为三级的防护区域,实现梯度预警,对车辆的不同车速和不同的制动效果做出不同等级的报警效果。具体来说,第一级防护区域设置在距离施工工地100 m处,最小速度阈值为100 km/h;第二级防护区域设置在距离施工工地50 m处,最小速度阈值为60 km/h;第三级防护区域设置在距离施工工地30 m处,最小速度阈值为40 km/h。
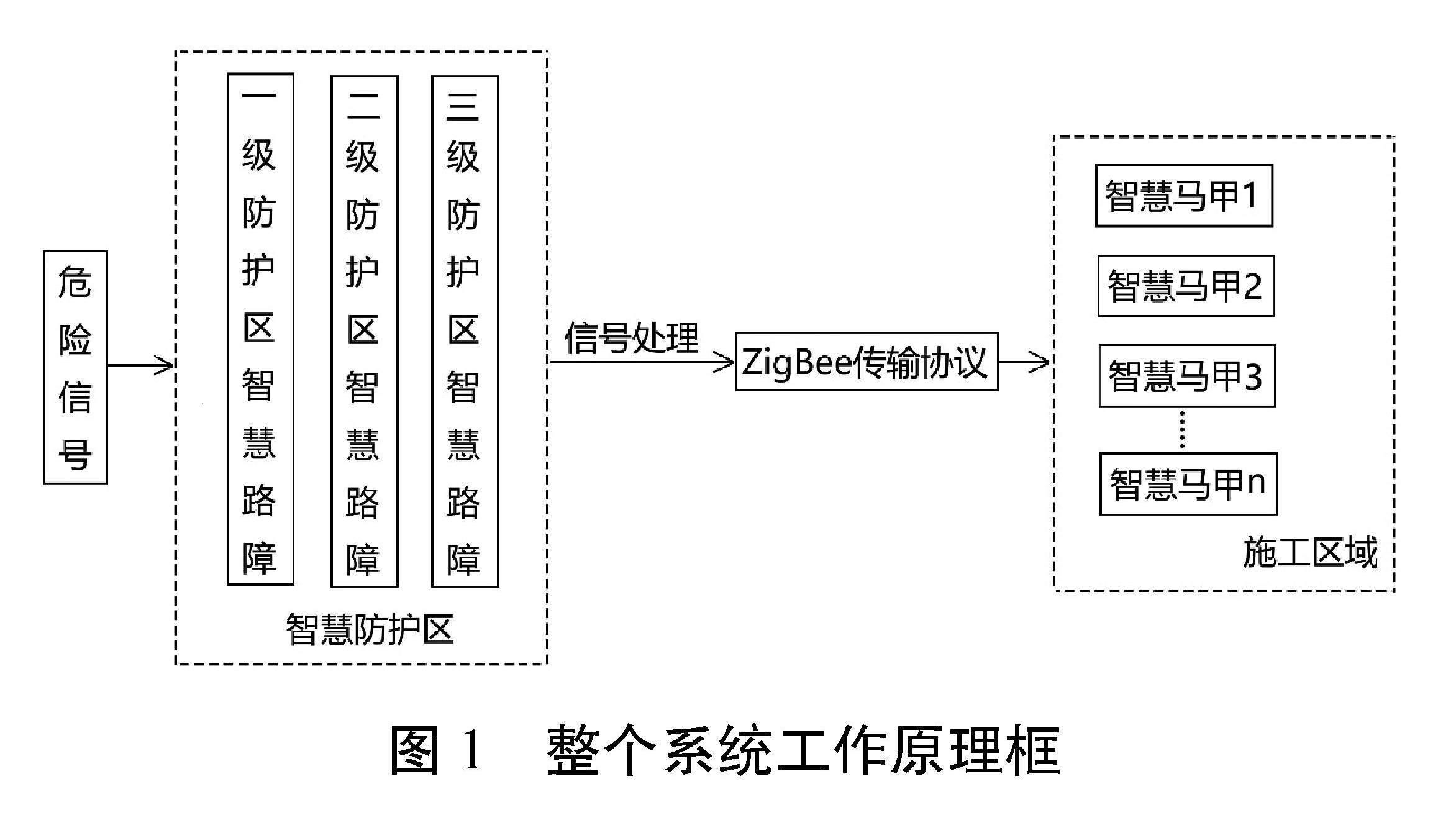
这样设置的依据是:首先不计驾驶者的反应时间,设车辆的制动力为F,且有F 上述分析仅基于刹车过程,经统计数据显示,普通人遇到险情的反应时间约为0.2 s。该文将遇到惊吓后做出反应的时间考虑在内,即将反应时间延长至1 s,则制动距离为:,得到考虑驾驶员反应时间时不同车速下的制动距离。取刹车起始速度为40 km/h、60 km/h和100 km/h三种情况,可以得到制动距离的理论数值。在实际系统设置时,每级防护区路障距离施工工地的距离应大于该理论值,并留有一定的余量。因此,可以得到防护区距离工地的距离和最小速度阈值。 每一级防护区的路障对抵达该防护区的车辆速度进行捕获,将捕获后的车速与该级防护区所设置的最小速度阈值进行比较,如果大于该防护区的最小速度阈值,那么就会启动该路障上面设置的警报灯,警报灯闪烁对该超速车辆进行提示。同时,智慧马甲通过无线接收方式接收到报警信号,并做出响应。 下面对三级防护区是否执行动作并且发送信号进行讨论: (1)当超过第一级防护区设置的最小速度阈值时,该级防护区执行动作,路障警报灯闪烁并发送信号给智慧马甲,使智慧马甲做出报警动作。反之,该级防护区不执行动作。 (2)当车辆的车速满足第一级动作的条件后,如果满足第二级防护区的动作条件,第二级防护区的路障警报灯闪烁并发送信号给智慧马甲。反之,此级路障报警灯不闪烁,但仍发送信号给智慧马甲,使智慧马甲取消报警动作。 (3)当车速满足第一、二级防护区设置的最小速度阈值后,将来到第三级防护区,若满足第二级防护区的动作条件,则第三级防护区的路障警报灯闪烁并发送信号给智慧马甲。反之,此级路障报警灯不闪烁,但仍发送信号给智慧马甲,使智慧马甲取消报警动作。 1.2 智慧马甲 智慧马甲由震动反馈模块、报警指示灯和报警蜂鳴器组成。震动反馈模块设置在肩部、肩胛骨处,报警蜂鸣器设置在肩部,报警指示灯设置在腹部以及对应后背的位置。智慧马甲具体工作原理对应于智慧路障发送信号的三种状态[3]: (1)第一种状态,只有智慧马甲上的震动反馈模块执行动作。 (2)第二种状态,智慧马甲上的震动反馈模块和报警指示灯同时作用。 (3)第三种状态,智慧马甲上的震动反馈模块、报警指示灯以及报警蜂鸣器同时作用。 需要特别说明的是,在智慧马甲上的三种报警状态中都有震动反馈模块,此模块的报警逻辑非简单的数字量报警,报警的控制逻辑是基于PWM原理进行工作。简单来说,车速越高,震动反馈的强度越大。 PWM即脉冲宽度调制原理,是一种用于控制调节电子设备输出的技术,通过改变占空比不同的矩形脉冲宽度控制输出值。该智慧马甲上所用的震动反馈模块支持通过该原理对震动强度的调节。具体来说,通过改变单片机IO口输出脉冲的宽度调节电压输出,对应不同的震动强度。控制逻辑为:当智慧路障反馈速度信号给智慧马甲时,智慧马甲上的处理器会区分此信号,判断该信号来自哪一级防护区,该区分方式是通过发送数据的从机地址进行实现;其次处理器会将该速度值与预先设定好的最小速度阈值作比较,并进行数字运算,具体为,将实时速度值同最小速度阈值做差,并将此差值与最小速度阈值的一半作商,得到的结果即为震动模块的占空比,即占空比。同最小速度阈值的一半作商的目的是为了放大超速信号,使系统面对超速的反应更加灵敏。 1.3 无线传输系统 该系统的无线通信技术使用了ZigBee协议,该技术是最近发展起来的一种短距离无线通信技术,功耗低,被业界认为是最有可能应用在工控场合的无线方式[4]。该协议相比其他无线传输协议的优点是功耗低、抗干扰力强、传输速度快、实时性强、自组网能力强。虽然相较于蓝牙和WiFi,该协议传输数据的速率较低,但是在本系统的应用场景下,传输的数据量很小,在传输速率上体现不出较大的差异性。 具體的通信过程为:ZigBee模块协调器将智慧路障的ZigBee模块和智慧马甲上的ZigBee模块进行组网,智慧路障上的测速传感器首先通过中央处理器对检测到的速度数据进行处理,再决定是否发送给智慧马甲;若智慧马甲收到数据,再经过中央处理器对数据做处理,最后作出对应的动作。 2 软硬件设计 2.1 硬件部分 考虑应用场景在户外,所以该系统的供电采用光储联合供电。在白天太阳辐射充裕时,由于光生伏打效应在光伏电池产生电压,通过DC/DC进行降压转换,一部分电压加载在一定的负载上产生输出电流给系统供电,另一部分电能则输入到电池形成充电电压。在夜晚没有太阳辐射时,电池作为主要供电来源,产生放电电流[5]。该设计降低了功耗与后期维护成本。 该系统的硬件部分分为两大部分,第一部分是智慧路障,第二部分是智慧马甲,两者均采用单片机作为控制中心,都由光储联合供电。此外,智慧路障由ZigBee无线传输模块、报警灯和速度传感器组成。智慧马甲由ZigBee无线传输模块、震动模块、蜂鸣器和报警灯组成。 整个主动预防系统的工作原理大致为:超速信号被设置在离施工工地具有一定距离的智慧防护区进行提前识别,通过ZigBee协议将处理后的信号发送给正在施工工地作业的工人身上的智慧马甲,对不同程序的危险信号能够做出不同的报警提示,实现让施工工人预先得知危险、提前撤离危险区域、提高施工安全性的目的。整个系统工作原理如图1所示。 2.2 软件部分 施工工地主动预防系统主程序的流程图如图2所示,该系统上电后首先进行装置初始化,智慧路障上的速度传感器采集速度数据,并在中央处理器里逐级决定是否产生报警信号,并将此信号传输给智慧马甲。若决定发送报警信号,那么再对通信是否故障进行判断,若通信没有故障,则速度值写入发送缓存区,然后由ZigBee模块发送缓存区的数据,同时智慧路障上的报警灯闪烁。若低于最小速度阈值,在检查没有通信故障后,再由单片机逐级决定是不发送信号还是发送震动减弱信号。 施工工地主动预防系统的子程序流程图如图3所示。在智慧马甲接收数据前,首先要判断是否存在通信故障,如果通信存在故障那么智慧马甲产生故障报警,需要进行设备调试。相反,智慧马甲可以接收来自智慧路障的报警信号,再进行相应的报警任务。 3 结语 该文设计了一种基于施工工地主动预防的保护系统,由分布在智慧路障和智慧马甲上的中央处理器和无线通信模块组成。系统通过测量接近施工工地的车辆速度,由ZigBee无线传输模块发送和接收车速,最后通过中央处理器对不同的车辆做出多样化的报警提示信号,进而实现对施工工人在面对车祸险情时的警示。此外,系统还具有通信自检、故障报警等功能,是一套低成本、智能化、可有效提高施工工人安全性的主动预防系统。 参考文献 [1]代华北. 轨道交通工程施工安全监控管理信息系统设计与应用研究[J]. 居业, 2019(2): 25+29. [2]商兆涛, 尹志凯, 张红彬, 等. 城市轨道交通施工安全风险预警体系研究[J]. 河南科学, 2020(5): 740-748. [3]王军雷, 应世杰, 李百川. 高速公路汽车追尾预警系统的开发研究[J]. 安全与环境学报, 2006(4): 122-125. [4]周怡颋, 凌志浩, 吴勤勤. ZigBee无线通信技术及其应用探讨[J]. 自动化仪表, 2005(6): 5-9. [5]张纯杰, 赵志刚, 高溥. 光储联合供电数据采集系统的设计及数据预处理[J]. 电子设计工程, 2014(20): 131-134+138.
猜你喜欢
电脑知识与技术(2016年21期)2016-10-18
中国新通信(2016年16期)2016-10-18
科学与财富(2016年28期)2016-10-14
环球时报(2016-08-01)2016-08-01