
基于数据驱动的范数最优迭代学习控制
2024-05-23 08:35许万肖迪陈婷薇
湖北工业大学学报 2024年2期
许万 肖迪 陈婷薇
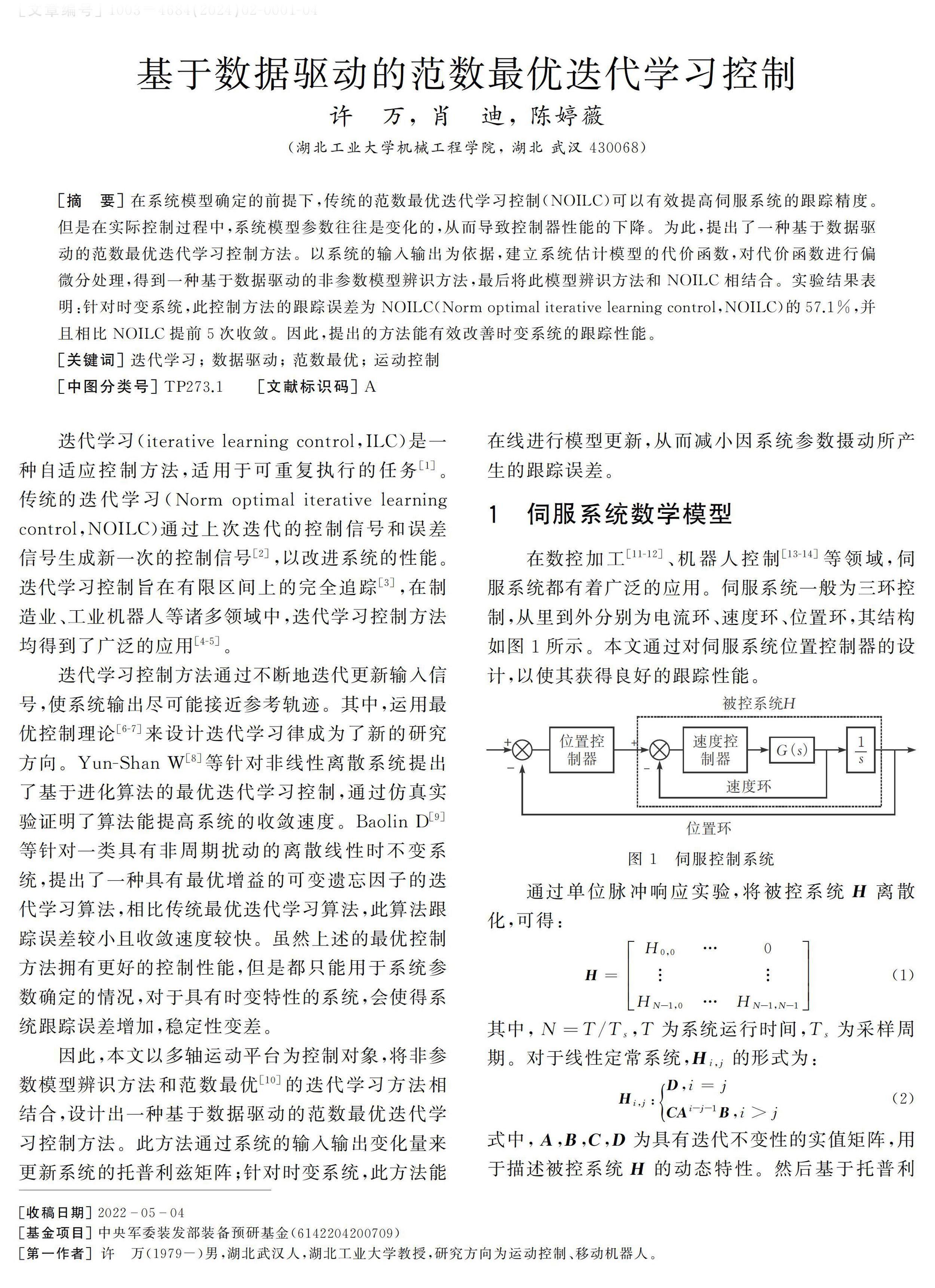
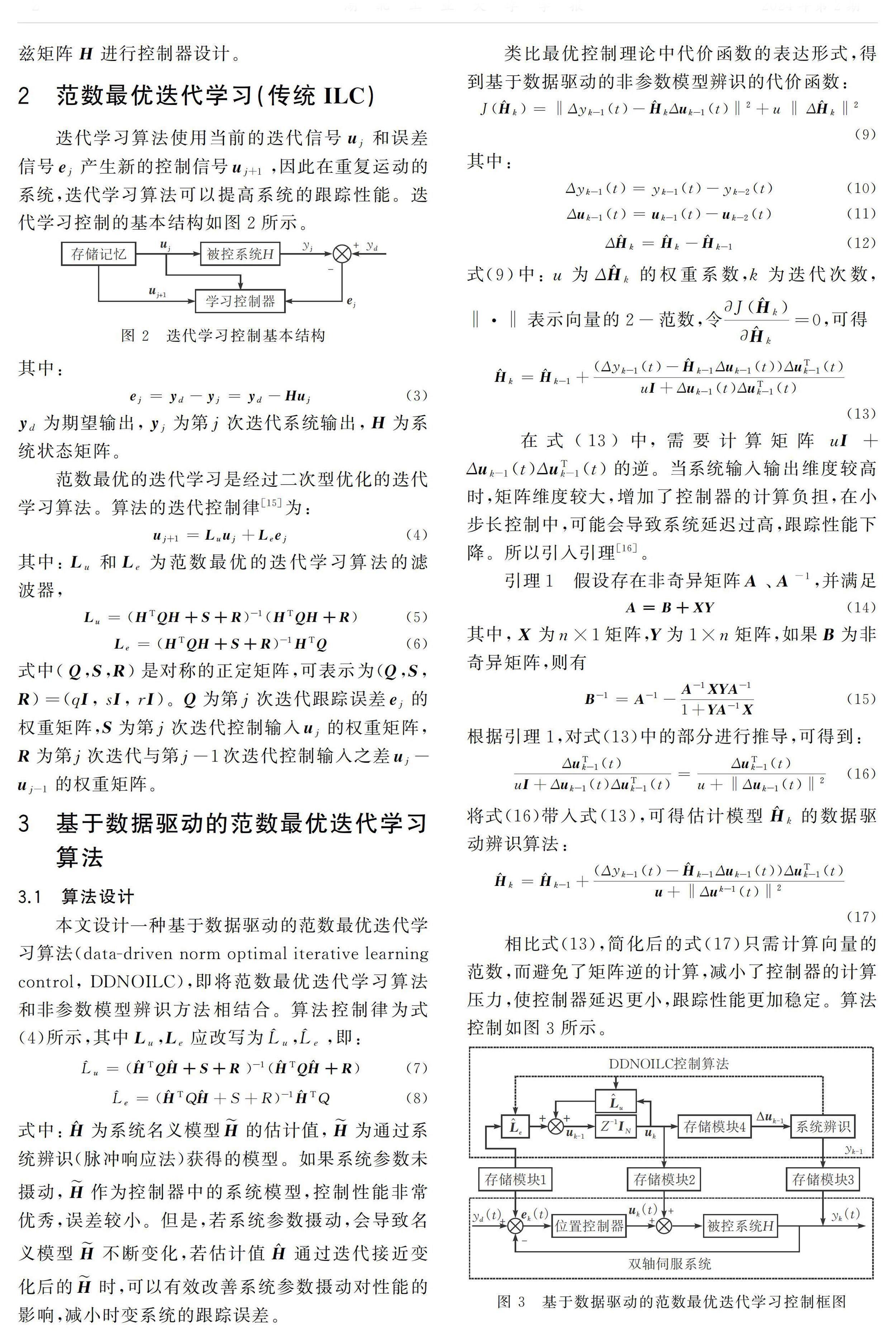

[摘要] 在系统模型确定的前提下,传统的范数最优迭代学习控制(NOILC)可以有效提高伺服系统的跟踪精度。但是在实际控制过程中,系统模型参数往往是变化的,从而导致控制器性能的下降。为此,提出了一种基于数据驱动的范数最优迭代学习控制方法。以系统的输入输出为依据,建立系统估计模型的代价函数,对代价函数进行偏微分处理,得到一种基于数据驱动的非参数模型辨识方法,最后将此模型辨識方法和NOILC相结合。实验结果表明:针对时变系统,此控制方法的跟踪误差为NOILC(Norm optimal iterative learning control,NOILC)的57.1%,并且相比NOILC提前5次收敛。因此,提出的方法能有效改善时变系统的跟踪性能。
[关键词] 迭代学习; 数据驱动; 范数最优; 运动控制
[中图分类号] TP273.1[文献标识码] A
猜你喜欢
价值工程(2016年35期)2017-01-23
软件(2016年4期)2017-01-20
科技创新与应用(2016年34期)2016-12-23
青春岁月(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年27期)2016-12-15
科技视界(2016年1期)2016-03-30
企业导报(2015年15期)2016-01-18
现代电子技术(2014年17期)2014-09-17
现代电子技术(2014年10期)2014-07-19
